



上下車體匹配及CAS造型匹配詳細(xì)教程 
局部匹配:地板 局部匹配:后輪罩 穿透檢查及修復(fù),更新焊點,網(wǎng)格質(zhì)量修復(fù),光滑處理等 匹配CAS造型 提取原模型及目標(biāo)CAS的特征線 2天 1D Mapping變形 CAS面匹配微調(diào) 穿透檢查及修復(fù)
2213
DEP MeshWorks ??? 3年前
基于深度學(xué)習(xí)的多目標(biāo)跟蹤算法原理 
也可以通過設(shè)計二分類代價,使相同目標(biāo)的檢測特征匹配類型為 1,然不同目標(biāo)的檢測特征匹配類型為 0,從而學(xué)習(xí)并輸出(0,1]之間的檢測匹配度。如果考慮已有軌跡與檢測之間的匹配,采用深度學(xué)習(xí)方法可以用于設(shè)計并計算軌跡之間的匹配相似度,這種方法可以認(rèn)為是基于深度學(xué)習(xí)的高階特征匹配方法。使用深度學(xué)習(xí)計算高階特征匹配算法,可以學(xué)習(xí)多幀表現(xiàn)特征的高階匹配相似度,也可以學(xué)習(xí)運(yùn)動特征的匹配相關(guān)度。
3206
駕駛哥 ??? 4年前
MeshWorks進(jìn)行汽車前保險杠匹配變形 
結(jié)論: MeshWorks的特征線映射方法不僅僅可以快捷的將部件匹配變形,同時可以實現(xiàn)高精度變形;變形后的零件,無須再調(diào)整配合面,安裝硬點;保證項目開發(fā)過程中,高效率的搭建車身模型。若您想咨詢MeshWorks軟件購買事宜,請下方掃碼或聯(lián)系18665820511或caesoft@qq.com。
2096 1 1
DEP MeshWorks ??? 3年前
基于Matlab的纖維圖像特征提取與自動分類程序?qū)崿F(xiàn) 
讀取纖維圖片,自動輸入纖維種類,顯示纖維圖像,經(jīng)過灰度處理,再通過二值化+細(xì)化,利用Harris角點檢測算法進(jìn)行特征點提取,進(jìn)行匹配相似性計算,從而最終輸入分類結(jié)果,顯示纖維種類。筆者寫的部分代碼和UI界面如圖3所示。
2686 2 1
320科技工作室 ??? 1年前
Workbench之22 Eigenvalue Buckling 特征值屈曲分析 
Workbench之22 Eigenvalue Buckling 特征值屈曲分析特征值屈曲分析系統(tǒng),預(yù)報理想彈性結(jié)構(gòu)的理論屈曲強(qiáng)度,此方法使用彈性屈曲分析的書本方法,例如,柱體的特征值屈曲分析與經(jīng)典歐拉方法匹配。然而,缺陷和非線性導(dǎo)致實際結(jié)構(gòu)達(dá)不到其理論彈性屈曲強(qiáng)度。特征值屈曲分析通常求解快速,但結(jié)果不保守。
3073 1 1
仿真工匠 ??? 3年前
無人機(jī)導(dǎo)航定位系統(tǒng)關(guān)鍵技術(shù)研究 
在圖像匹配階段,通過特征點描述符對兩幅圖像進(jìn)行匹配可能會產(chǎn)生錯誤的匹配點,從而影響視覺數(shù)據(jù)的可靠性和準(zhǔn)確性。因此,圖像匹配篩選算法需要一種方法來判斷匹配的好壞,更好地消除不匹配的點和噪聲。 定位精度和實時性 四旋翼無人機(jī)的最快飛行速度可以達(dá)到每秒8米。
2324
無人機(jī)圈 ??? 4年前
深度學(xué)習(xí)|基于MobileNet的多目標(biāo)跟蹤深度學(xué)習(xí)算法 
當(dāng)指派完成后, 分類出未匹配的檢測和跟蹤器.5) 對未確認(rèn)狀態(tài)的跟蹤器、未匹配的跟蹤器和未匹配的檢測進(jìn)行IOU匹配, 再次使用匈牙利算法進(jìn)行指派.6) 對于匹配的跟蹤器進(jìn)行參數(shù)更新, 刪除再次未匹配的跟蹤器, 未匹配的檢測初始化為新目標(biāo).算法整體流程如圖 3所示.
2443 1
龍騰AI技術(shù) ??? 3年前
三維重建與自動駕駛的契合點在哪里?盤一盤近幾年SOTA方法! 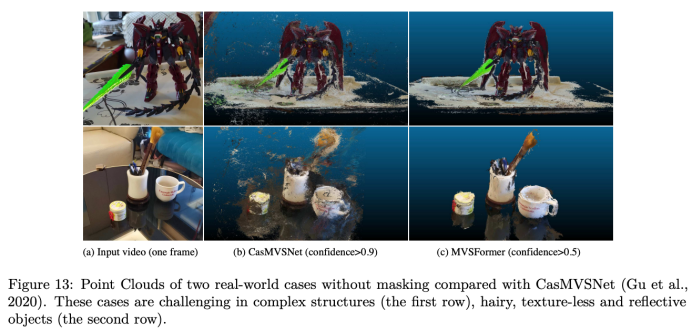
考慮MVS特征匹配任務(wù)的本質(zhì),提出一個強(qiáng)大的特征匹配轉(zhuǎn)換器 (FMT),使用內(nèi)部和外部注意力來聚合圖像內(nèi)和圖像之間的上下文信息。為了更好地適應(yīng)FMT,本文利用自適應(yīng)接收場(ARF)模塊確保特征范圍內(nèi)的平穩(wěn)過渡,并通過特征路徑跨越不同尺度傳遞轉(zhuǎn)換后的特征和梯度,從而跨越不同階段。此外,本文應(yīng)用成對特征相關(guān)性來度量特征之間的相似性,并采用模糊性減少焦距損失來加強(qiáng)監(jiān)督。
4290
駕駛哥 ??? 3年前
CATIA裝配協(xié)同關(guān)聯(lián)設(shè)計及知識工程智能化解決方案New 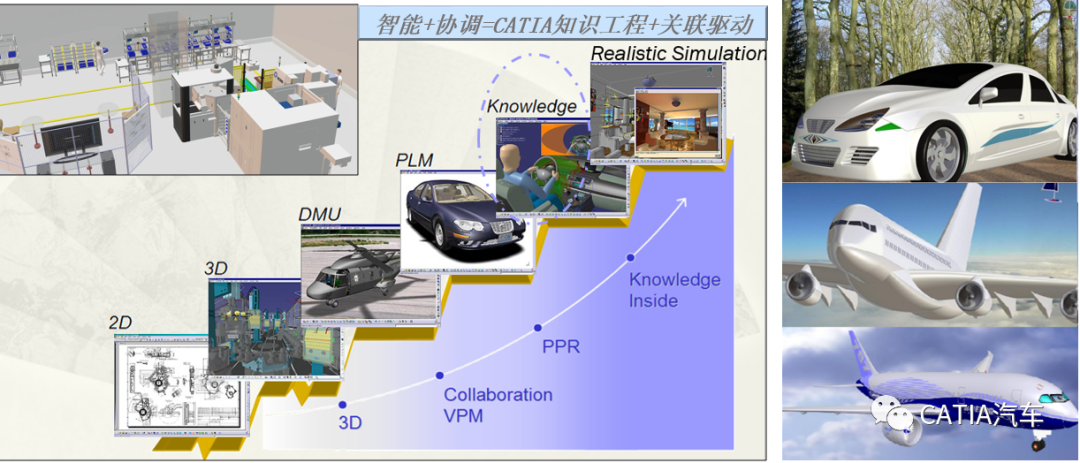
基于CATIA知識工程的車輛行業(yè)內(nèi)外飾復(fù)雜曲面特征快速建模智能模塊4.4:CATIA汽車、航空曲面自適應(yīng)匹配特征批量化建模二次開發(fā)曲面自適應(yīng)匹配特征批量化建模二次開發(fā)4.5 車載鏡面視野空間包絡(luò)體校核快速驗證模塊(案列:汽車后視鏡視野校核)汽車后視鏡視野校核4.6: CATIA管道非標(biāo)設(shè)計EKL二次開發(fā)模塊功能介紹 本模塊是基于CATIA
4875 2 1
CATIA助手 ??? 2年前
自主研發(fā) | 基于PERA SIM的壓桿特征值屈曲分析 
2.2 特征值屈曲分析 特征值屈曲分析預(yù)測了理想彈性結(jié)構(gòu)的理論屈曲強(qiáng)度。該方法與教科書中的彈性屈曲分析方法相一致。歐拉柱的特征值屈曲分析與經(jīng)典歐拉解相匹配。缺陷和非線性行為阻礙了大多數(shù)現(xiàn)實世界結(jié)構(gòu)實現(xiàn)其理論彈性屈曲強(qiáng)度。因此,特征值屈曲通常產(chǎn)生非保守結(jié)果,因為它沒有考慮到這些影響。
2634 11 3
安世亞太 ??? 2年前
DEP MeshWorks - 內(nèi)飾件A面快速匹配 
MeshWorks是基于特征的Morphing變形工具,可以快速變形現(xiàn)有的FE和CFD模型以匹配新的幾何形狀或新的比例。組件級和系統(tǒng)級FE/CFD模型可以通過變形,精確地適應(yīng)目標(biāo)設(shè)計特征,如造型線、截面、比例等。MeshWorks以其強(qiáng)大的網(wǎng)格建模、模型裝配工具幫助用戶更快的建立高質(zhì)量模型。
1984
DEP MeshWorks ??? 3年前
Novator系列影像測量儀創(chuàng)新融合閃測技術(shù)! 
7、圖像匹配,輕松測量傳統(tǒng)影像儀在實際現(xiàn)場測量中,通過方框約束方式來實現(xiàn)工件測量元素識別抓取,但工件受材料、加工工藝等多種因素影響,加工后會存在變形量較大問題,傳統(tǒng)的方框范圍約束產(chǎn)品變形不足以滿足現(xiàn)場測量需求。中圖儀器推出的Novator系列高端影像儀,新增圖像匹配功能,通過產(chǎn)品整體圖像實現(xiàn)匹配測量,解決了產(chǎn)品變形較大的難題!
2180
深圳市中圖儀器股份有限公司 ??? 2年前
利用MeshWorks進(jìn)行后尾門精確變形 
,MeshWorks通過應(yīng)用“特征線映射“的方法可以達(dá)到精確的安裝面變形匹配,大大提高了概念階段的分析效率。
2044
DEP MeshWorks ??? 3年前
3DCS中點和特征的創(chuàng)建方法 

適用人群:尺寸工程師,結(jié)構(gòu)工程師,匹配工程師,工藝工程師等產(chǎn)品及工藝設(shè)計人員3DCS中點和特征的創(chuàng)建方法(免費)【已結(jié)束】? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?直播時間:2021-05-21 19:303DCS作為領(lǐng)先的三維尺寸公差分析軟件,已經(jīng)在汽車、航空航天、電子產(chǎn)品、機(jī)械重工等行業(yè)得到廣泛的應(yīng)用。
1646
ETA_China ??? 5年前
盆地結(jié)構(gòu)控制下的地層壓力-流體-儲集性協(xié)同演化及控藏作用——以東營凹陷古近系為例 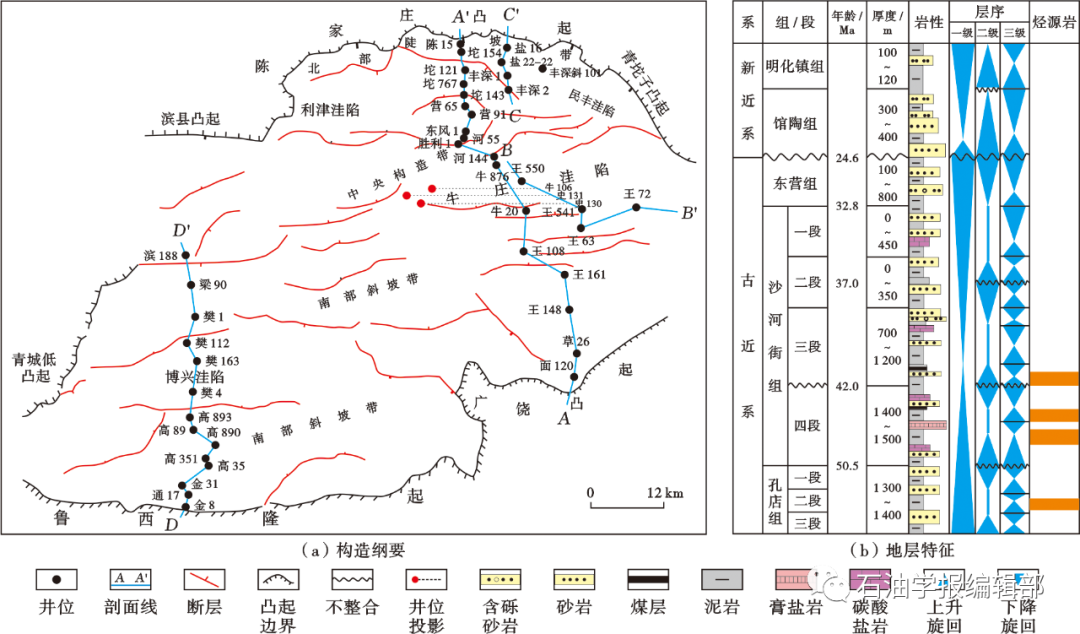
因此,洼陷帶不同部位的濁積巖油藏受控于超壓期次及大小、酸性流體與有效儲層的協(xié)同匹配,形成了現(xiàn)今不同充滿度巖性油藏的差異富集特征。 注:Es3S—沙三段上亞段;Es3Z—沙三段中亞段;Es3X—沙三段下亞段;Es4S—沙四段上亞段。
4353 1
仿真客 ??? 2年前
知識圖譜|知識圖譜的典型應(yīng)用 
b.基于圖結(jié)構(gòu)的匹配 c.基于外部知識庫的匹配e.不平衡本體匹配 d.跨語言本體匹配 f.弱信息本體匹配5.5實體匹配基本流程和常用方法 a.基于相似度的實例匹配 b.基于規(guī)則或推理的實體匹配c.基于機(jī)器學(xué)習(xí)的實例匹配 d.大規(guī)模知識圖譜的實例匹配(1)基于分塊的實例匹配(2)無需分塊的實例匹配(3)大規(guī)模實例匹配的分布式處理5.6 知識融合上機(jī)實踐1.百科知識融合
2190
龍騰AI技術(shù) ??? 3年前
純電動輕型載貨車電驅(qū)橋參數(shù)匹配及仿真分析 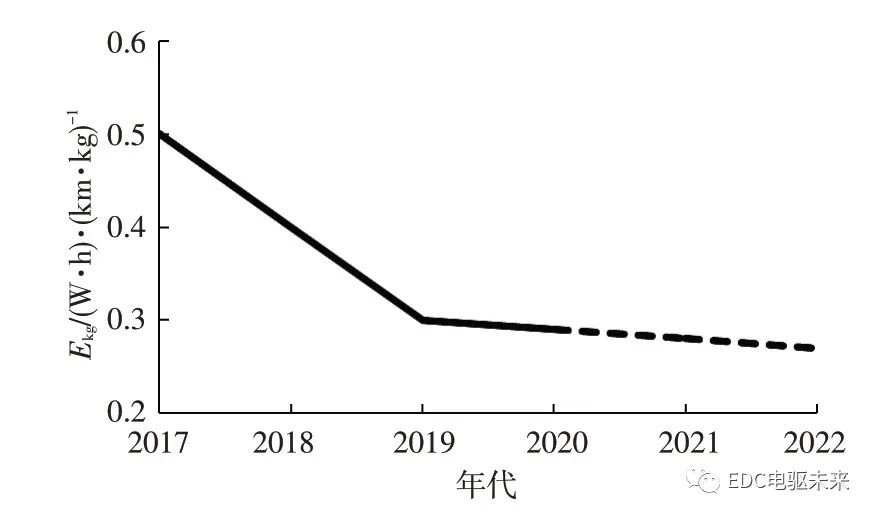
以上數(shù)據(jù)結(jié)論是基于現(xiàn)有開發(fā)經(jīng)驗和數(shù)據(jù)結(jié)論進(jìn)行參數(shù)匹配及仿真模擬,和實車測試數(shù)據(jù)會有一定差異,未來需要進(jìn)行樣車試制,進(jìn)一步試驗驗證分析。
2773
EDC電驅(qū)未來 ??? 3年前
基于模型的自動駕駛汽車端到端深度強(qiáng)化學(xué)習(xí)策略 
相應(yīng)提升至3D空間的操作可以詳細(xì)描述如下: 使用逆內(nèi)函數(shù) K?1和預(yù)測深度,像素圖像空間中的特征在相機(jī)坐標(biāo)中被改進(jìn)為 3D針孔相機(jī)模型;以自車的慣性中心點,設(shè)置剛體運(yùn)動M將3D相機(jī)坐標(biāo)轉(zhuǎn)換為3D車輛坐標(biāo); 剝離不匹配點。在訓(xùn)練時,先驗信息被訓(xùn)練為通過 KL 匹配后驗信息分歧,但是它們不一定針對穩(wěn)健的長期未來預(yù)測進(jìn)行優(yōu)化。
3907 2 1
駕駛哥 ??? 2年前
CAN總線的終端電阻為什么常用120Ω? 
任何一根線纜的特征阻抗都可以通過實驗的方式得出。線纜的一端接方波發(fā)生器,另一端接一個可調(diào)電阻,并通過示波器觀察電阻上的波形。調(diào)整電阻阻值的大小,直到電阻上的信號是一個良好的無振鈴的方波: 阻抗匹配與信號完整性 ,此時的電阻值可以認(rèn)為與線纜的特征阻抗一致。
2173
木火柴 ??? 4年前
認(rèn)識學(xué)習(xí)聲紋識別到底是什么東西?如何應(yīng)用? 
這點其實很好理解,每個人由于語音器官的差異導(dǎo)致了不同的發(fā)音習(xí)慣,其語音特征是難以被輕易模仿的。2、模式匹配識別判斷技術(shù)該技術(shù)實施的第一步是要獲取跟講話人個性相關(guān)的特征參數(shù),再根據(jù)一定的準(zhǔn)則,將未識別的特征參數(shù)與模型庫中訓(xùn)練好的模型進(jìn)行特征匹配,最終根據(jù)相似度得出最匹配的結(jié)果并進(jìn)行輸出。其中在模型匹配中常用到的幾種模型有矢量化模型、隨機(jī)模型、神經(jīng)網(wǎng)絡(luò)模型等。
2975
智能化弱電工程設(shè)計與施工 ??? 4年前
20條/頁 
 27
27 跳至頁

技術(shù)鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓(xùn)客服
- 平臺客服
TOP
