



DTAS 3D多約束裝配助力懸架公差分析&尺寸鏈計算:麥弗遜/雙叉臂/多連桿/H臂一網打盡 
五連桿后懸除了運動副建模以外,也可以采用多約束裝配的建模方法,如下圖所示。使用多約束裝配控制轉向節安裝點與副車架安裝點之間的距離,最終控制轉向節的最終姿態。多約束裝配不僅適用于五連桿后懸,也適用于其它各類型的前后懸架。多約束裝配相比運動副建模求解速度快,建模簡單等優點。
2554
DTAS棣拓尺寸公差分析及尺寸鏈計算 ??? 12月前
案例19 挖掘機臂裝配體的瞬態動力學分析 
分析和求解控制 對挖掘機臂裝配體進行兩個非線性瞬態分析,分析中包含有限變形和大轉動效應。
3342 8 1
龍飛宇 ??? 3年前
RecurDyn經典案例:象鼻機器人機械臂的優化設計 
這種機械臂機器人是由一組圓盤,通過中心連接到一個柔性軸上,由一組穿過圓盤的電纜控制。電纜的末端直接連接到電機上。手臂具有連續運動,可針對特定的應用場景進行定制,例如,探查危險區域。為了優化這種柔性機械臂的設計,需要研究幾個參數:纜繩張力、纜繩末端隨時間變化的力、驅動機構所需的力、機器人的工作體積。
3366
杭州擬創(RecurDyn原廠) ??? 4年前
基于InteWeld的焊接模擬仿真 
本文選取石油鉆機自動化設備中的支撐臂進行焊接和模擬仿真對比分析。由于其結構特點為長桿型,焊接時熱量集中,結構具有一定的拘束度,且板厚較薄,焊后易變形,因此需要采用合理的焊接工藝及措施控制焊接變形。本文對支撐臂進行三維建模、有限元網格劃分,并利用軟件InteWeld進行焊接模擬仿真。
5243 5 2
金屬加工前沿 ??? 2年前
基于ADAMS的點按手法運動仿真 
由于ADAMS三維建模過程復雜,采用Solid Works建模,然后將建好的模型導入ADAMS軟件中進行定義。建模的步驟如下[3]:(1)用Solid Works建模后的模型如圖1所示。建好的模型保存成Parasolid(*.x_t)格式。
3012 2
擺渡人張 ??? 2年前
基于容性能量轉移原理DCDC變換器模型建立問題
其工作原理為控制開關閥交替導通,使儲能橋臂交替連接至高壓側和低壓側,實現能量的傳遞,子模塊為半橋子模塊。目前相對單相結構進行建模,連接至高壓側時橋臂電流方向如圖3所示,連接低壓側時橋臂電流方向會發生改變,圖四為iha與ila波形。
2309 1 1
用戶_56417 ??? 1年前
衛星結構精度如何控制?航天某院基于3DCC的工程實踐 
案例二:衛星機械臂空間姿態精度偏差公差優化分析另一典型案例來自某衛星機械臂雙軸轉動機構的正交精度控制問題。該機構由X、Y軸轉動單元、艙板支架及軸承等部件組成,對兩軸正交性提出不高于±0.015°的嚴格要求。通過3DCC構建裝配尺寸鏈模型,對端面垂直度、同軸度及軸承游隙等誤差因素進行系統分析。
1365
笑酒仙 ??? 2月前
挖掘機多體動力學仿真 
后續,我們將在挖掘機全剛體模型的基礎上,對挖掘機動臂進行柔性化,進行基于INTESIM-FMBD軟件的剛柔耦合多體動力學仿真,分析挖掘機動臂動態應力變化。另外,通過我方軟件提供的控制模型接口,可以進一步實現虛擬樣機下的動力學與控制聯合仿真。 文章來源:英特仿真INTESIM
3709 3
CAE仿真學習菌 ??? 2年前
多學科統一的多體動力學建模方法 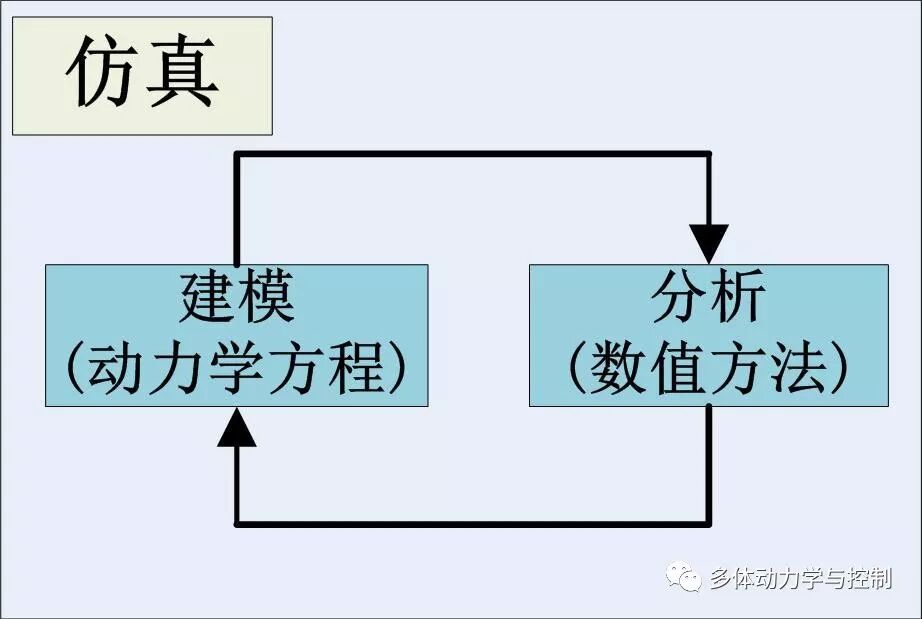
這樣就構成了廣義位移約束的控制方程、廣義速度約束的控制方程、作用力約束的控制方程、動態約束的控制方程。 將動力學方程和各個約束方程組合在一起,得到式中含有廣義位移約束的拉格朗日乘子和關于廣義速度的拉格朗日乘子。上式是由個微分代數方程(DAE)構成。多學科耦合的動力學控制方程的建模都可以寫成上式的形式,同時方程規范美觀,易于編程。
3299 5 3
CAE仿真學習菌 ??? 2年前
重型并串式液壓機械臂建模與simscape仿真 
二、simscape仿真仿真視頻如下:液壓控制機械臂simscape仿真
4081 1 1
余俊煒 ??? 2年前
基于ADAMS的汽車懸架靜態工作載荷提取 
· 關注部件彈性變形:對于關鍵部件(如控制臂),若需要考慮其彈性變形對載荷分布的影響,可采用柔性體(Flexible Body) 建模方法,提高精度。· 理解載荷方向:定義Request時,務必清楚所輸出力/力矩的方向是相對于哪個坐標系(全局坐標系或局部Marker坐標系),這對于后續應用載荷至關重要。
2630 1 1
320科技工作室 ??? 7月前
Ansys ACT案例----挖掘機斗桿、動臂、鏟斗工作分析案例 
向導可用于啟動和控制不同的目標應用程序 向導可能以混合向導(在此過程中使用不同的應用程序)或簡單向導(一個唯一的目標應用程序)的形式出現 如果可能,向導可用于WorkBnech平臺和獨立應用程序 僅Workbench應用環境下: DesignModeler Mechanical Workbench和獨立應用程序:
3297 3 2
some ??? 4年前
基于Optistruct拓撲優化控制臂優化實用仿真(附帶詳細hm模型) 

本實例是基于optistruct優化模塊優化控制臂優化實用仿真,本實例包含常規建模步驟涉及到分析步的設置,材料屬性的設置,邊界載荷施加等,優化模塊涉及到體積分數的設置,體積最小化約束 ,拔模方向約束等,提交計算,結果查看等,附帶詳細涉及的.hm模型,有需要的同學可自行下載查看。
42 2
王振東 ??? 6年前
基于Abaqus-ATOM優化模塊拓撲優化控制臂實用仿真(附帶詳細cae模型) 
本實例是基于Abaqus-ATOM優化模塊拓撲優化控制臂優化實用仿真,本實例包含常規建模步驟涉及到分析步的設置,材料截面的設置,邊界載荷施加等,優化模塊涉及到應變能的設置,體積約束,邊界幾何約束,拔模方向約束等,提交計算,結果查看等,附帶詳細涉及的.cae(Abaqus6.14)模型,有需要的同學可自行下載查看。
81 7
王振東 ??? 6年前
基于Abaqus-ATOM優化模塊形貌優化控制臂實用仿真(附帶詳細cae模型及inp文件) 
本實例是基于Abaqus-ATOM優化模塊對控制臂進行形貌優化實用仿真,本視頻包含全流程常規建模步驟涉及到分析步的設置,材料截面的設置,邊界載荷施加等,形貌優化模塊涉及到應力目標和體積目標的設置,脫模約束等,提交計算,結果查看等,附帶詳細涉及的模型,有需要的同學可自行下載查看。后面的步驟較為詳細,可以自行放慢視頻觀看學習,有問題可以私聊咨詢,可以觀看視頻的同時對照模型自行建立。
24
王振東 ??? 6年前
基于Abaqus-ATOM優化模塊尺寸優化控制臂實用仿真(附帶詳細cae模型文件) 
本實例是基于Abaqus-ATOM優化模塊對控制臂進行尺寸優化實用仿真,本期視頻所用的模型網格為殼單元,本視頻包含全流程常規建模步驟涉及到分析步的設置,材料截面的設置,邊界載荷施加等,尺寸優化模塊涉及到應變能目標和體積目標的設置,厚度尺寸的上下限約束等,提交計算,結果查看等,附帶詳細涉及的模型,有需要的同學可自行下載查看。
23
王振東 ??? 6年前
基于Matlab Simulink的三軸運動平臺剛柔耦合仿真 
圖1 基于模態綜合法的剛柔耦合建模流程以圖2所示的三軸機械臂運動平臺為例,將其按照相對運動關系劃分為底座、懸臂、滑臺和工作軸部件,通過自由模態分析進行各部件剛柔耦合判別,將底座、懸臂和工作軸部件建模為柔性體,滑臺部件建模為剛性體。 圖2 三軸機械臂運動平臺模型圖在此基礎上,采用模塊化建模方式在Simulink環境中構建三軸運動平臺的剛柔耦合仿真模型。
1057
320科技工作室 ??? 1月前
汽車底盤系統的解決方案 
(2)控制臂計算車輛碰到路沿時,下控制臂發生了屈曲變形,實驗結果與計算結果的對比。(3)控制臂拓撲優化分析按照減重目標進行剛度優化,在重量減少的同時滿足剛度最大的要求,Abaqus/ATOM可以在Abaqus/CAE界面下進行非線性優化,設計出結構更合理、使用材料更少的產品。
2816 9 3
【已注銷】 ??? 3年前
Ansys Lumerical | 行波 Mach-Zehnder 調制器仿真分析 
調制器本身包括一個輸入波導 Y 分支,其后是每個分支上的波導和光調制器,以及將 2 個調制器臂重新組合在一起的輸出 Y 分支。上調制器臂還有一個行波電極 (TWE),相移應用于此臂,而下臂保持零參考偏壓。光網絡分析儀向輸入 Y 支路提供光輸入,并從輸出 Y 支路接收輸出光信號,而上臂 TWE 被直流信號偏置。
2820 1
宇熠科技 ??? 3年前
《虛擬世界的力學交響曲:Adams如何重塑工業仿真邊界》
不同于靜態的CAD建模,Adams構建的是會"呼吸"的數字化機械生命體,其核心價值在于揭示運動與力的動態博弈。二、產品內核:三大顛覆性能力解析1. "骨骼與神經"建模體系Adams獨創的混合建模架構,既能刻畫變速箱齒輪的剛性嚙合,又可模擬傳動帶的彈性震顫。這種剛柔耦合的"數字解剖學",讓螺栓預緊力造成的微米級變形與起重機臂架的大幅度擺動,在同一時空維度中精確對話。2.
2266
庭田科技 ??? 11月前
20條/頁 
跳至頁

技術鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP
