



ZEMAX軟件技術應用專題:用於數位元投影光學中均勻照明的陣列透鏡 (蒼蠅眼) 
使用透鏡陣列的數位投影系統通常與具有提供半準直入射光的拋物面反射器的燈組件結合使用。目前,它們主要用於 LCD 數位元元投影光引擎,以向空間光調製器照明平面提供均勻照明。在上圖中可以看到透鏡陣列。 (這張照片由 In Vision 提供,www.in-vision.at)。陣列中每個單獨的光學元件的形狀可以是正方形或矩形。
2001
w**elab86_Swsp ??? 3年前
Ansys Zemax光學設計軟件技術教程:眼科鏡片設計 
物平面通常是設定在無限遠,雖然一個近的物平面可以用來達成不同的鏡片設計。下面的例子展示了設計的原則。無窮遠的光線經過一個-3.00D的透鏡後發散,並在半徑1/3公尺遠點球上形成一個虛像,此時遠點球的球心在透鏡後表面的頂點上。我們可以發現任何角度入射的光線,最後都能順利的經過瞳孔。在範例檔案中我們以視場角15°和30°進行印證,但要注意的是其實許多眼鏡的設計允許配戴者能有50°以上的視角。
2212
w**elab86_Swsp ??? 3年前
ZEMAX軟件技術應用專題:基於 Alvarez自由曲面透鏡的光學變焦 
Alvarez變焦的一般表示及其與傳統光學變焦的比較我們的 Alvarez 變焦鏡頭的核心是無焦伽利略系統。第一對Alvarez鏡組代表伽利略系統的物鏡,而第二對Alvarez鏡組代表目鏡。要了解更多資訊,您可以在 MyZemax.com 找到以下文章,這些文章將介紹如何在 OpticStudio 中對 Alvarez 變焦鏡頭進行建模並查看真實範例!
2219
w**elab86_Swsp ??? 3年前
Ansys Zemax|用于數字投影光學中均勻照明的蠅眼陣列 
考慮視場陣列的一種方法是,單個子透鏡的工作是將通道的物方陣列的孔徑以一定的放大率成像到照明平面。在LCD和LCoS數字投影儀的燈光引擎中,光源在到達照明平面之前必須被極化,因此常常使用偏振轉換組件(PCS)來進行極化。PCS陣列通常與視場陣列的平面側粘接,為PCS陣列的菱形提供公共支座和剛性支撐。示例下面是在數字投影儀中使用蠅眼照明系統的簡單示例。
2148
宇熠科技 ??? 6月前
ZEMAX軟件技術應用專題:如何使用ZOS-API創建飛行時間用戶分析 
連接應用程式和 OpticStudio 有 4 種程式模式,但它們可以分為兩大類: 完全控制(獨立(Standalone)模式和自訂擴展(User Extensions)模式),這種情況下,使用者通常完全控制鏡頭設計和使用者介面。 有限訪問(自訂運算元(User Operands)模式和自訂分析模式),這種情況下,使用者使用現有鏡標頭檔的副本進行處理和分析。
2080
w**elab86_Swsp ??? 3年前
Ansys Zemax | 用于數字投影光學中均勻照明的蠅眼陣列 
如上圖所示,如果將物方陣列與準直光一起使用,我們將聚光鏡放置在物方陣列的焦平面上,我們將在照明平面上獲得均勻的輻照度,這可以在上圖的探測器查看器(Detector Viewer)中看到。不幸的是,我們沒能獲得點光源,這使得獲得準直光很困難。由于光源有一定的體積,并不是一個點,使得帶有拋物面反射器的大燈組件發出的光,就像通常在數字投影儀中看到的那樣,具有一些發散度或角度。
2105
宇熠科技 ??? 3年前
投影式光固化生物3D打印應用:血管與血管化 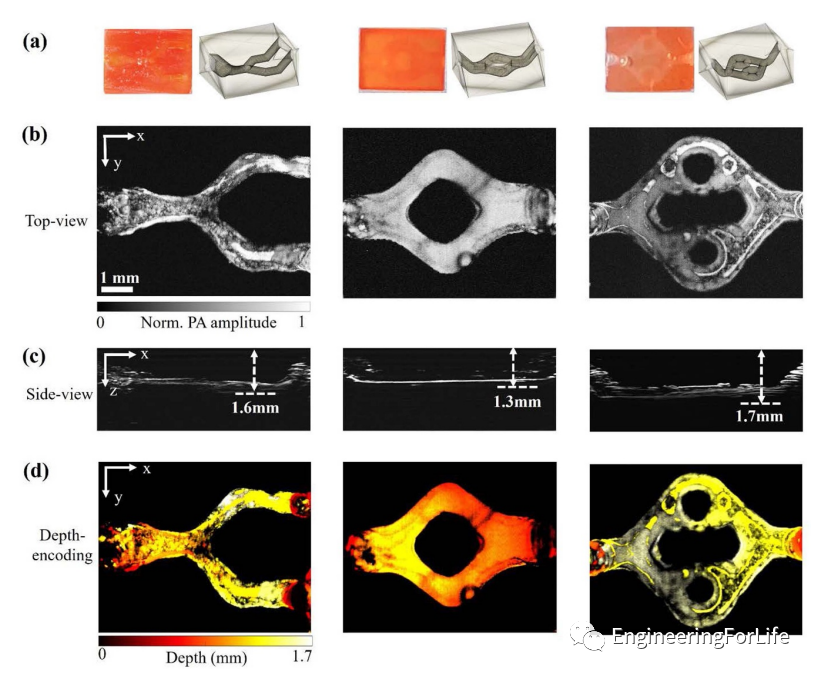
《Biomaterials》:投影式光固化3D打印仿生皮膚(2020) 該研究利用投影式光固化3D打印技術對GelMA/ HA-NB/LAP生物墨水進行了結構制造,打印了具有仿生結構的仿生皮膚。仿生皮膚中相互貫通的孔道可以促進營養物進入和氧氣的交換,有利于細胞黏附,遷移和增殖與血管生成。
3178
南極熊3D打印 ??? 3年前
SYNOPSYS 光學設計軟件課程五十九:短焦微型非球面投影物鏡設計 
課程五十九:短焦微型非球面投影物鏡設計 投影物鏡通常指 LCD、DLP、LCOS 等投影儀使用的物鏡。 投影物鏡有以下特點: 1.投影物鏡的物是空間光調制器 SLM ,包括上面提到的 LCD 和 DLP ,它決定了物鏡的視場線和分辨率,從而影響系統外形尺寸和信息量。但實際設計時會倒置設計,將其放在像面。
2137
墨光科技 ??? 2年前
定焦投影物鏡設計以及優化 | SYNOPSYS 光學設計軟件第68課 
投影物鏡通常指 LCD、DLP、LCOS 等投影儀使用的物鏡。投影物鏡有以下特點:1. 投影物鏡的物是空間光調制器 SLM,包括上面提到的 LCD 和 DLP ,它決定了物鏡的視場線和分辨率,從而影響系統外形尺寸和信息量。但實際設計時會倒置設計,將其放在像面。2. 像方遠心:在像空間中,出瞳位于無限遠,所有視場的主光線都和光軸平行,從而和 SLM 垂直。
2372
墨光科技 ??? 2年前
ZEMAX軟件技術應用專題:如何為光學相干斷層掃描系統建模 
OCT測量系統依賴於邁克森干涉儀 (Michelson interferometer),使得從參考物反射的光與樣品之間的相干性表明散射光源自樣品中與參考鏡的位置相對應的深度。本文將逐步介紹如何在OpticStudio中創建商業上可用的OCT模型。模型系統健康人眼的角膜和虹膜(A)以及視網膜組織(B)的橫截面圖像如下所示。 顏色變化對應於返迴光強度的變化。
2221
w**elab86_Swsp ??? 3年前
投影儀上自動對焦鏡頭馬達驅動芯片SS8833T 
投影儀工作原理是將光線照射到圖像的顯示元件產生影像,然后通過鏡頭進行投影;而對焦的過程是將鏡頭本體與被放映物之間的距離調整到合適位置,投影出清晰的畫面。馬達的主要作用就是帶動鏡頭移動;對應不同類型的馬達,也對應有不同的驅動;驅動芯片就是接受控制端發來的信號,從而輸出電流給馬達,從而帶動馬達運動。
2023
工采電子 ??? 3年前
ZEMAX | 如何使用 OpticStudio 設計車標投影系統 Ⅲ 
從設計步驟中可以看出,此類系統的設計較為復雜,需要將兩個透鏡系統翻轉后分開進行設計和優化,之后還需要翻轉整個系統并使用非序列模式對其成像效果進行仿真,所以在分開設計的時候要注意光瞳匹配的問題,即需要保證照明系統出射的光線,能有效的通過投影物鏡。在每一個不同的 .zmx 文件中,孔徑和視場都需要按照實際情況進行設置,物像的距離也需要特別注意。
3062
宇熠科技 ??? 4年前
短焦微型非球面投影物鏡設計 | SYNOPSYS 光學設計軟件第69課 
投影物鏡通常指 LCD、DLP、LCOS 等投影儀使用的物鏡。投影物鏡有以下特點:1. 投影物鏡的物是空間光調制器 SLM,包括上面提到的 LCD 和 DLP,它決定了物鏡的視場線和分辨率,從而影響系統外形尺寸和信息量。但實際設計時會倒置設計,將其放在像面。2. 像方遠心:在像空間中,出瞳位于無限遠,所有視場的主光線都和光軸平行,從而和 SLM 垂直。
2124
墨光科技 ??? 2年前
Zemax案例 | ZEMAX 賦能高分辨率投影物鏡設計 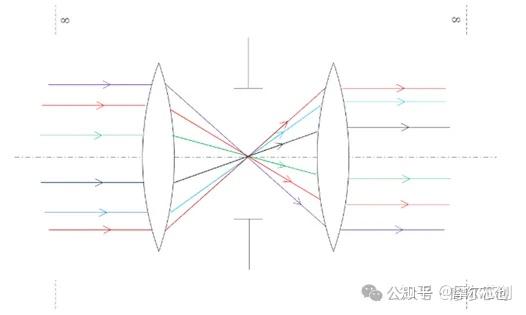
核心設計理論與技術指標1)系統工作原理為解決基板離焦導致的倍率誤差問題,該投影物鏡采用雙遠心光路結構,整體類似4F成像系統。前組透鏡的后焦面與后組透鏡的前焦面重合,視場光闌位于該重合平面,分別將前組、后組透鏡成像于物方、像方無窮遠。
2336
摩爾芯創 ??? 4月前
ZEMAX軟件技術應用專題:照明系統簡介 
非成像系統,顧名思義,不會將物或像作為設計方法的考慮范圍,與成像系統有著根本區別,但二者都是照明仿真中的有用概念。成像理論在照明系統中的應用有實像的系統可能是攝影鏡頭,也可能是投影儀。如果像直接投影到屏幕上,我們可以把光線從物方傳播到屏幕來實現照明。 投影儀成像系統與攝影鏡頭還是有些不同,例如它利用透鏡的遠心性來提高物光分布的均勻性。
2415
w**elab86_Swsp ??? 3年前
機械制圖中的各種簡化畫法,提高你的繪圖水平,趕緊來看看吧! 
三、第三角畫法第一角法的投影方法是:人--物--影;第三角法的投影方法是:人--影--物。我國及歐洲國家采用第一角畫法,但美、日等國家采用第三角投影方法。下圖為第一角和第三角投影方法的對比。下為第一角畫法和第三角畫法的投影動態圖。第一角
3056 1 1
模具社 ??? 3年前
方案分享 | AVM合成數據仿真驗證方案 
三、圖像處理與AVM合成驗證集如前文所述,本文使用的AVM腳本是基于車輛四周,位于相鄰兩個相機重疊視野的標定物,通過選取參考投影區域實現魚眼相機到BEV的轉化,以前視魚眼相機為例: 圖6:投影區域及BEV轉化示意圖首先,由于是仿真傳感器的標準OpenCV魚眼相機模型,焦距、中心像素位置、畸變參數等內參均已知,可直接使用OpenCV的去畸變函數實現去畸變
2645
康謀keymotek ??? 1年前
自動駕駛汽車中的激光雷達和攝像頭傳感器融合 
2.3D障礙物檢測(相機) 這個過程要困難得多,尤其是在使用單目相機時。在3D中尋找障礙物需要我們準確地知道我們的投影值(內在和外在校準)并使用深度學習。如果我們想獲得正確的邊界框,了解車輛的大小和方向也至關重要。 本文是關于融合的文章,不介紹檢測部分。 可以查看 文章 。 最后,關注一下匹配。
2426
駕駛哥 ??? 4年前
機械制圖基本知識講義(詳細) 
2.3.3視圖與視圖之間的關系(三視圖之間的關系) 物體都有長、寬、高三個方向以及上下、左右、前后六個方位,三視圖的每個視圖都反映出兩個方向的形狀和四個方位,如圖1-5所示,主視圖反映物體的長度和高度以及物體的上、下、左、右四個方位;俯視圖反映物體的長度和寬度以及物體的左、右、前、后四個方位;左視圖反映物體的高度和寬度以及物體上、下、前、后四個方位;三個視圖反映的形狀大小和方位是同一個物體的長
2581
機械加工網 ??? 3年前
案例26-橡膠防塵套的非線性分析 
第一次接觸發生在橡膠套的外編織物之間。之后,在第一接觸區域中觀察到拉伸,并且第二接觸發生在橡膠套的內編織之間。最后,第三次接觸發生在橡膠護套的內編織物和軸之間。 建議 以下是執行此類分析的建議: • 注意,基于曲面投影的方法(KEYOPT(4)=3)不用于定義剛性軸和橡膠套之間的接觸,因為該方法不支持由原始目標片段定義的剛性面。
2358 1
龍飛宇 ??? 3年前
20條/頁 
 10
10 跳至頁

技術鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP
