



Ansys Zemax光學設計軟件技術教程:眼科鏡片設計 
本文不包括漸進式鏡片設計,儘管漸進式鏡片時常根據一般的鏡片曲率原則進行設計,但這些基礎的原則多以消除近視為目的,無法為特殊用途的鏡片設計提供太多的幫助。
2212
w**elab86_Swsp ??? 3年前
Fluent仿真案例-高超音速再入艙氣動熱仿真 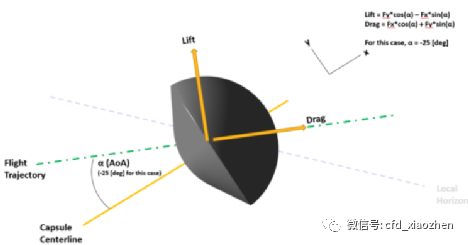
顯示壁面的表面熱通量分布。 顯示對稱平面上的平移-旋轉溫度與振動-電子溫度的比值。 比較近似停滯線上的平移溫度和振動電子溫度。 -------END-------文章來源:CFD小鎮
3962 3 1
仿真客 ??? 2年前
齒輪傳動系統碰撞振動特性研究 附碰撞振動與控制金棟平下載 
這時,動力學模型可表現為一個二維平面振動系統,把齒面摩擦忽略掉,而且齒輪的動態嚙合力沿嚙合線方向作用,因此現在它是一個具有 4 自由度的模型,分別是主、從動輪的旋轉自由度和 Y 方向的平移自由度,則系統的廣義位移向量可表示為: 圖2 直齒輪系統動力學模型 各齒輪沿扭轉自由度與 Y 方向的位移均會使輪副嚙合狀態發生改變,故齒輪各自由度位移在嚙合線上的投影為:
2190
有限人生 ??? 4年前
曠達 | 汽車內飾面料產品的先進制造工藝探討 
3.電子橫移高速經編織造技術 隨著經編機制造技術的發展,電子橫移機構逐漸取代了采用花盤、鏈塊的機械式橫移機構。電子橫移高速經編織造技術可以實現花型的自由更換,方便快捷,可以突破花型循壞的限制,在高速條件下穩定運行,這些都是具有機械式橫移機構的經編機所無法實現的。
2972
年輕態 ??? 4年前
關于鉆井,你想了解的都在這… 
5)N(北)坐標和E(東)坐標:是指測點在以井口為原點的水平面坐標系里的坐標值。 6)視平移:(Vertical Section)是井身上某點在某一垂直投影面上的水平位移,它不是真實的水平位移,所以稱之為視平移。AA為閉合位移,VA為視平移。視平移與水平位移越接近,說明井眼方位控制的越好。水平位移都是正值,而視平移可能是正值,也可能是負值。
10138 3
化工活動家 ??? 3年前
基于SolidWorks的自動裝卸機械結構設計 
為了提高整體裝卸系統的適用 性,利用機械式夾持機構的直桿式平 移夾持機構,動力源為電機,使用 4 片夾片。圖 1 為夾持機構運動示意, 構件 A 為曲線,構件 B 利用滑塊和 構件 A、固定直桿 C 連接。在構件 A 旋轉過程中,構件 B 受到滑塊的約 束做直線運動,運動規律和直桿、曲 桿在垂直方向投影面的交點位置相 關,利用改變曲線參數對滑塊運動 速度和位置等參數進行控制。
4676 5
太極元氣 ??? 2年前
(一)自己也能開發ABAQUS復合材料層合板自動建模工具? 
然后通過坐標平移的方式,沿著板的長度方向復制這列節點,生成整個平面上的節點矩陣。 每個節點都被賦予一個唯一的編號,這個編號系統在后續的三維擴展和單元定義中將被延續使用。 節點坐標的生成采用了矩陣運算的方式,利用MATLAB的向量化特性提高了計算效率。在節點生成之后,需要根據節點的拓撲關系定義單元連接。每個四邊形單元由四個節點按照逆時針順序定義。
3435
靜界有限元 ??? 6月前
最全匯總!鍛造技術知識! 
欠壓鍛造欠壓指垂直于分模面方向的尺寸普遍增大,產生的原因可能是:①鍛造溫度低。②設備噸位不足,錘擊力不足或錘擊次數不足。錯移鍛造錯移是鍛件沿分模面的上半部相對于下半部產生位移。產生的原因可能是:①滑塊(錘頭)與導軌之間的間隙過大;②鍛模設計不合理,缺少消除錯移力的鎖口或導柱;③模具安裝不良。軸線彎曲鍛造鍛件軸線彎曲,與平面的幾何位置有誤差。
4592
FMMM ??? 3年前
NASA眼中CFD的未來(5)知識提取 
然而,如果用戶僅保存單個圖像或電影,則無法探索數據(縮放、平移、旋轉、動畫)。為了實現大型數據集的交互式可視化,洛斯阿拉莫斯國家實驗室的Cinema技術利用從求解器通過原位/中轉管道收集的許多不同視點的大量圖像提取物集合。然后可以通過Cinema查看器、Web應用程序甚至通過Jupyter notebook 來查看這些圖像。
2794
網格大師 ??? 2年前
【試驗數據記錄】長壽中頻爐爐襯搗打料的研制及現場使用 
將混合均勻的干式搗打料放入鋼桶內,在振動臺上震動1分鐘后,移去鋼圈,刮平表面,測定搗打料堆積重量,根據公式1計算干式搗打料的堆積密度。
2374
鑄造工程師 ??? 4年前
關于abaqus-umat的一些資料整理 
如果物體內各點發生位移后仍保待各質點間初始狀態的相對位置,則物體實際上只發生了剛體平移和轉動,這種位移稱為剛體位移。如果物體各質點發生位移后改變了各點間初始狀態的相對位置,則物體同時也產生了形狀的變化,其中包括體積改變和形狀畸變;物體的這種變化稱為物體的變形運動或簡稱為變形,它包括微元體的純變形和整體運動。
4598 9 2
晶體塑性有限元 ??? 3年前
20條/頁 
跳至頁

技術鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP
