





【科技前沿】打印出行走的軟體機(jī)器人 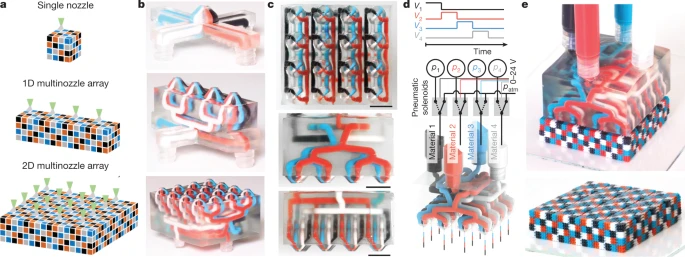
為了證明MM3D打印對打印對象的組成、結(jié)構(gòu)及特性的空間編程能力,文章列舉了打印折紙機(jī)構(gòu)以及氣動行走機(jī)器人的兩個例子。圖4 MM3D打印折紙圖5 打印行走軟體機(jī)器人展望未來,這種集成化的多材料打印噴頭將實(shí)現(xiàn)體素化功能性結(jié)構(gòu)的快速打印,此外在打印分辨率和打印效率方面,定制化的打印墨水和打印結(jié)構(gòu)的功能化同樣具有重要的研究和應(yīng)用價值。
2210
機(jī)械工程師 ??? 3年前
ZEMAX軟件技術(shù)應(yīng)用專題:利用Kogelnik方法模擬體積全像光柵的繞射效率 
AnsysZemax光學(xué)軟件咨詢與訂購聯(lián)系方式 聯(lián)系人:南京光研 徐保平 手機(jī)號:15051861513 微信號:13627124798 您也可以掃一掃下面的二維碼直接咨詢
2123
w**elab86_Swsp ??? 3年前
小米發(fā)布仿生四足機(jī)器人“鐵蛋”!解讀背后的建模和仿真技術(shù) 
為獲得更好的運(yùn)動效果,可采用五次多項(xiàng)式軌跡進(jìn)行足端軌跡規(guī)劃,并在機(jī)器人行走前對 4 條腿的初始位置進(jìn)行調(diào)整,使得在行走過程中,重心相對于支撐腳連線的運(yùn)動盡量保證前后對稱,提高行走過程中機(jī)身穩(wěn)定。最后,根據(jù)仿真結(jié)果對設(shè)計(jì)方案進(jìn)行優(yōu)化,提高機(jī)器人結(jié)構(gòu)的合理性。理論就說到這了,如果想親自體驗(yàn)一番的話,可以掃碼領(lǐng)取北鯤云2000核時免費(fèi)體驗(yàn)券在北鯤云超算平臺進(jìn)行仿真模擬計(jì)算。
2920
深圳北鯤云計(jì)算有限公司 ??? 3年前
外骨骼機(jī)器人未來走向哪? 
而科大訊飛則在其2022年年會上公布“訊飛超腦2030計(jì)劃”,其中詳細(xì)描述了其具有康復(fù)訓(xùn)練功能的外骨骼機(jī)器人“已經(jīng)研發(fā)出原型機(jī)”這一進(jìn)展。 科大訊飛表示,未來約在2023-2025年,將實(shí)現(xiàn)自適應(yīng)運(yùn)動功能研發(fā)的自適應(yīng)行走外骨骼機(jī)器人,幫助行動不便的老年人或殘疾人自主獨(dú)立行走。 無論是創(chuàng)企的大額融資,還是巨頭的跨界研發(fā),都展現(xiàn)出對于這一賽道的看好,背后的原因到底在哪?
3170
機(jī)械工程師 ??? 3年前
《基于 RecurDyn 的四履帶足機(jī)器人運(yùn)動學(xué)仿真》現(xiàn)已開放領(lǐng)取 
摘要: 應(yīng)用多體動力學(xué)仿真分析軟件 RecurDyn 對四履帶足機(jī)器人進(jìn)行全三維建模及越障過程仿真,并分析了履帶機(jī)器人行走過 程 中 的 力 學(xué) 模 型,仿真 結(jié) 果 動 態(tài),準(zhǔn)確的反映了四履帶足機(jī)器人行走機(jī)構(gòu)的越障過程,驗(yàn)證了四履帶足機(jī)器人行走機(jī)構(gòu)較之雙履帶結(jié)構(gòu)形式出色的越障能力,體現(xiàn) 了 RecurDyn 軟件在履帶機(jī)器人的動力學(xué)仿真分析方面的有效性和優(yōu)越性 。1. 引言2.
2554
上海安世亞太 ??? 2年前
移動機(jī)器人的分類及介紹
二、足式機(jī)器人 足式機(jī)器人以模仿生物的行走方式為特色,具備良好的地形適應(yīng)性和運(yùn)動靈活性。 雙足機(jī)器人:雙足機(jī)器人模仿人類行走方式,在復(fù)雜環(huán)境中的移動表現(xiàn)出高度的靈活性和適應(yīng)性。在科研領(lǐng)域,雙足機(jī)器人被廣泛用于研究人類步態(tài),通過模擬人類的行走、跑步、上下樓梯等動作,幫助科學(xué)家深入了解人體運(yùn)動力學(xué)和神經(jīng)控制機(jī)制,為康復(fù)醫(yī)學(xué)、運(yùn)動訓(xùn)練等領(lǐng)域提供理論支持。
2754
探索者第2號前來報到 ??? 1年前
ZEMAX軟件技術(shù)應(yīng)用專題:如何使用ZOS-API創(chuàng)建飛行時間用戶分析 
AnsysZemax光學(xué)軟件咨詢與訂購聯(lián)系方式 聯(lián)系人:南京光研 徐保平 手機(jī)號:15051861513 微信號:13627124798 您也可以掃一掃下面的二維碼直接咨詢
2080
w**elab86_Swsp ??? 3年前
魯渝能源四足機(jī)器人無線充電方案,量身定制,告別“趴窩”焦慮 
四足機(jī)器人的作業(yè)環(huán)境越惡劣,傳統(tǒng)充電方式的短板暴露得越徹底。 痛點(diǎn)三:停靠精度與晃動誤差四足機(jī)器人在完成作業(yè)任務(wù)后,自動行走到充電區(qū)域。然而,不同于輪式AGV的平穩(wěn)停靠,四足機(jī)器人站立時存在自然的晃動和姿態(tài)變化。機(jī)械臂或連桿式對接需要毫米級的重復(fù)定位精度,而四足機(jī)器人的機(jī)械結(jié)構(gòu)特性注定了它難以做到這一點(diǎn)。對接失敗、反復(fù)嘗試、充電中斷,成為家常便飯。
741
魯渝能源無線充電 ??? 18天前
【6/8更新】全球最大蜘蛛機(jī)器人,自重2噸,可以像玩游戲一樣遠(yuǎn)程操控工作 
蜘蛛機(jī)器人Mantis兩噸的重量,讓它成了目前世界上最重的六足機(jī)器人,成功打破世界紀(jì)錄。平時它的機(jī)械腳是用來行走的,6足的設(shè)定讓其擁有極高的穩(wěn)定性,就算不是平坦的大馬路也能跨越障礙物,輕松行走。要操控這個蜘蛛機(jī)器人有兩種方式,一種是“有人駕駛”。人進(jìn)駕駛艙,通過里頭的搖桿、按鍵操控。
2317
技術(shù)鄰CAD學(xué)習(xí) ??? 3年前
波士頓動力機(jī)器人,十年逆天史 
之后出了個新機(jī)器人分支:Atlas,改為電液混合。2013的Atlas,高1.8m,重達(dá)150kg,可以在不平整路面上緩慢行走,還能“金雞獨(dú)立”。可還是需要一根電纜進(jìn)行供電,配備激光測距儀和立體照相機(jī)。外力下維持平衡2016 第二代Atlas,使用了鋰電池組電源,終于擺脫了電纜的束縛。
2467
機(jī)械學(xué)霸 ??? 3年前
MicroStrain傳感器 - 幫助推動仿人機(jī)器人性能的發(fā)展 
其多樣化的產(chǎn)品組合包括 BEAR(用于機(jī)器人的背驅(qū)動機(jī)電執(zhí)行器)系列執(zhí)行器、BRUCE( 具有遵從性增強(qiáng)功能的雙足機(jī)器人單元)——兒童尺寸仿人機(jī)器人開放平臺,以及 THEMIS——公司最新的全尺寸仿人機(jī)器人。 THEMIS 采用功能強(qiáng)大的 BEAR 執(zhí)行器和先進(jìn)的傳感技術(shù),設(shè)計(jì)靈活安全,能以人類的速度穩(wěn)步行走,最高運(yùn)行速度可達(dá)每小時 10 公里。
2689
HBK測試與測量 ??? 11月前
海克斯康領(lǐng)跑人形機(jī)器人研發(fā) 
海克斯康工業(yè)軟件在人形機(jī)器人的主要應(yīng)用點(diǎn)如下:01運(yùn)動學(xué)、動力學(xué)仿真及載荷計(jì)算Adams軟件能夠?qū)θ诵螜C(jī)器人進(jìn)行精確的運(yùn)動學(xué)仿真,包括關(guān)節(jié)運(yùn)動、步態(tài)規(guī)劃及平衡控制仿真等。通過建立人形機(jī)器人的多體動力學(xué)模型,研發(fā)人員可以詳細(xì)分析各關(guān)節(jié)的運(yùn)動軌跡、速度和加速度,優(yōu)化機(jī)器人的行走步態(tài)和動作流程,確保其運(yùn)動的平穩(wěn)性和靈活性。
3242 1 1
海克斯康設(shè)計(jì)與仿真 ??? 1年前
ZEMAX軟件技術(shù)應(yīng)用專題:用於數(shù)位元投影光學(xué)中均勻照明的陣列透鏡 (蒼蠅眼) 
AnsysZemax光學(xué)軟件咨詢與訂購聯(lián)系方式 聯(lián)系人:南京光研 徐保平 手機(jī)號:15051861513 微信號:13627124798 您也可以掃一掃下面的二維碼直接咨詢
2002
w**elab86_Swsp ??? 3年前
基于Adams的六足直立式步行機(jī)器人運(yùn)動仿真分析 
關(guān)鍵詞 Adams 六足步行機(jī)器人 四連桿機(jī)構(gòu) 運(yùn)動學(xué)分析0 引言曲柄連桿機(jī)構(gòu)是連桿足式步行機(jī)器人的核心機(jī)構(gòu),是實(shí)現(xiàn)步行腿行走的關(guān)鍵零部件[1]。步行機(jī)構(gòu)曲柄連桿的方案設(shè)計(jì)及其運(yùn)動特性是影響機(jī)器人行走和運(yùn)動動作的重要因素[2]。
4190 7 8
仿真客 ??? 3年前
案例 | 火星漫游車的多體仿真 
DIANA 團(tuán)隊(duì)(Ducti Ingenio Accipimus Naturam Astrorum)是都靈理工學(xué)院的一個學(xué)生團(tuán)隊(duì),致力于太空應(yīng)用機(jī)器人的研究和開發(fā)。團(tuán)隊(duì)使用最新技術(shù)制作了漫游車的工程模型。DIANA 團(tuán)隊(duì)希望將太空機(jī)器人技術(shù)提升到一個新的高度,同時提供一個體驗(yàn)式學(xué)習(xí)的平臺。
2652
Cruise ??? 3年前
磁性噴霧劑,簡單噴一噴即可快速“制造”機(jī)器人 (轉(zhuǎn)載) 
這樣一來,在磁場的驅(qū)動下,物體就可以變成具有不同運(yùn)動模式的毫米級機(jī)器人,而且在玻璃、皮膚、木頭到沙子等粗糙程度不等的各種表面上,均可進(jìn)行爬行、翻轉(zhuǎn)、行走和滾動等運(yùn)動。該研究團(tuán)隊(duì)通過分別為棉線(1D)、折紙(2D 平面)、聚二甲基硅氧烷(PDMS)薄膜(2D 曲面/軟面)和塑料管(3D 圓形物體)噴涂 M-spray,使其轉(zhuǎn)化為了軟體爬行機(jī)器人、多足機(jī)器人、行走機(jī)器人和滾動機(jī)器人。
3025 91
琳泓c(diǎn)omsol ??? 5年前
可靠性測試裝備為仿生機(jī)器人未來發(fā)展賦能 
三、慧通測控:機(jī)器人相關(guān)測試解決方案1、機(jī)器人行走障礙測試 該系統(tǒng)主要驗(yàn)證仿生腿行走能力、步態(tài)和翻越障礙能力等。 測試系統(tǒng)由測試臺架、控制系統(tǒng)、高速攝影和數(shù)據(jù)采集系統(tǒng)組成。 臺架可升降高度,頂部有吊軌可輔助機(jī)器人防止摔倒。 底面可鋪設(shè)各種障礙模擬不同路面,如坡道、臺階、不平整路面等。 高速相機(jī)可實(shí)時記錄各關(guān)節(jié)運(yùn)動姿態(tài)角度等。
2242
德基西瓜 ??? 9月前
ZEMAX軟件技術(shù)應(yīng)用專題:如何在OpticStudio中設(shè)計(jì)DOE透鏡或超穎透鏡 
所需的設(shè)計(jì)和製造方法可能會有所不同,具體取決於微結(jié)構(gòu)的類型。參考文獻(xiàn)[5]顯示了根據(jù)給定的相位輪廓生成閃耀光柵的範(fàn)例。它還討論了單點(diǎn)金剛石車床的製造。可以在我們的知識庫文章中找到用於生成閃耀光柵的巨集:如何使用巨集計(jì)算繞射光學(xué)元件的垂度。或者,參考文獻(xiàn)[3]顯示了如何使用Lumerical FDTD軟體為給定的相位曲線設(shè)計(jì)超穎透鏡。這種方法的缺點(diǎn)是設(shè)計(jì)人員可能無法檢查整個系統(tǒng)的性能。
2189
w**elab86_Swsp ??? 3年前
小鵬機(jī)器人“貓步”刷屏背后:一場自研芯片到仿生軀體的技術(shù)豪賭 
2、“小腦”與“神經(jīng)”機(jī)器人的“小腦”負(fù)責(zé)平衡與運(yùn)動控制,是其靈活性的體現(xiàn)。小鵬IRON:仿生優(yōu)先的“肌腱”控制其仿生脊椎和肌肉設(shè)計(jì)不僅是外形上的模仿,更是運(yùn)動控制理念的體現(xiàn)。這種設(shè)計(jì)旨在模擬人體的柔順性和能量吸收能力,使其行走姿態(tài)(如“貓步”)更自然,對意外沖擊(如被碰撞)有更好的容錯性。
2107
數(shù)字中國產(chǎn)業(yè)展會 ??? 6月前
20條/頁 
跳至頁

技術(shù)鄰APP
工程師必備
工程師必備
- 項(xiàng)目客服
- 培訓(xùn)客服
- 平臺客服
TOP
