



橡膠制品常見老化因素 
由于臭氧分子具有親電性,因此,當大分子結構中含有增大雙鍵親核性的原子或原子團時,會提高臭氧與雙鍵反應的能力。在天然橡膠中,雙鍵碳原子連有供電性的甲基,增大了雙鍵的親核性,提高了臭氧化反應能力。在氯丁橡膠連接雙鍵原子上連接有吸電性的氯原子,減小了雙鍵的親核性,因而降低了臭氧化反應能力。 在靜態條件下,臭氧與橡膠作用后,在表面上生成一層臭氧化薄膜,可以阻止臭氧與橡膠接觸和繼續向內部滲透。
4518
高分 ??? 3年前
高靈敏度10按鍵觸摸感應芯片VK3610IM電容式觸控IC原廠,提供串行界面SCK、SDA、INT 作為與MCU溝通方式 
2 單鍵優先判斷輸出方式處理, 如果 K1 已經承認了, 需要等 K1 放開後, 其他按 鍵才能再被承認,同時間只有一個按鍵狀態會被輸出。 3 具有防呆措施, 若是按鍵有效輸出連續超過 10 秒, 就會做復位。 4 環境調適功能,可隨環境的溫濕度變化調整參考值,確保按鍵判斷工作正常。 5 可分辨水與手指的差異,對水漫與水珠覆蓋按鍵觸摸盤,仍可正確判斷按鍵動 作。
2140
西瓜妹1 ??? 2年前
某行走機構多體動力學與結構強度聯合仿真分析 
圖5 破壞圖片3、新結構優化分析 通過上述分析,可以確認必須對原設計結構進行適當優化,以降低主要受力區域的應力水平,提高行走機構關鍵部件的可靠性。一方面通過優化行走機構的鉸點位置,降低上述部件作業運行過程中鉸點的峰值載荷。另一方面優化絲杠和車架的受力結構,提高結構強度,以進一步降低結構的應力水平。
3175
CAE仿真學習菌 ??? 2年前
Zemax光學設計技術教程:如何使用Jones Matrix表面 
範例下方是一個將Jones Matrix表面作為1/4玻板(quarter wave plate)的案例。範例檔案可由文章頂端的連結下載。注意,上圖中Jones Matrix表面並沒有曲率半徑(Radius)的欄位。如上一個小節所說,這種表面通常用在準直光束垂直入射的情況,因此必須是一個平面。
2425
w**elab86_Swsp ??? 3年前
Moldex3D模流分析之Tokyo Seiki公司使用模流大幅減少試模次數 
以摩托車的喇叭按鍵孔為例,此塑件在組裝後續需承受多次的受力,故塑件成型過程中需避免結合線發生在受力區域。結合線是減弱成品強度的其中因素之一,所以由分析的結果可知原始設計的結合線位置剛好落在成品受力面,產品有強度不足的疑慮,移動澆口位置可以有效改善此問題。
2210
Moldex3D 中國 ??? 3年前
【科技前沿】打印出行走的軟體機器人 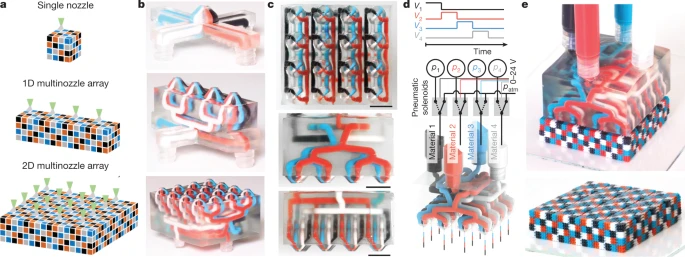
為了證明MM3D打印對打印對象的組成、結構及特性的空間編程能力,文章列舉了打印折紙機構以及氣動行走機器人的兩個例子。圖4 MM3D打印折紙圖5 打印行走軟體機器人展望未來,這種集成化的多材料打印噴頭將實現體素化功能性結構的快速打印,此外在打印分辨率和打印效率方面,定制化的打印墨水和打印結構的功能化同樣具有重要的研究和應用價值。
2210
機械工程師 ??? 3年前
車輪碾壓路面滾動行走仿真基礎 
路面施加固定約束,車輪與路面分開微小的距離0.1,然后分為“壓臺”和“行走”兩步加載。step1:車輪下壓0.11與路面接觸step2:車輪行駛方向釋放,繼續保持下壓量,然后施加旋轉位移,旋轉方向根據右手原則規定。分析結果
2469 2
360克 ??? 3年前
難得一見!地連墻鋼筋籠吊裝施工全流程詳解 
(9)履帶式起重機如必須帶載行走時,載荷必須符合規范要求,并要求行走道路堅實平整,重物應在輕重機行走正前方向,重物離地面不得超過50cm并栓好拉繩,緩慢行駛。嚴禁長距離帶載行駛。 (10)履帶式起重機行走時轉變不應過急,如轉彎半徑過小,應分次轉彎。
4152
學長施工日志 ??? 4年前
地表最強半導體封裝前處理 - Ansys Mechanical/Stacker Mesh Workflow 

初探六面體網格生成:實現「一鍵堆疊」的高效率流程。第三單元:局部錫球 (Local Bump) 建模實戰封裝核心組件:BGA/Micro-bump 的網格劃分難點分析。局部加密技術:如何在維持全局 Stacker 邏輯下,針對錫球進行精細化網格處理。確保錫球與基板 (Substrate)、晶圓 (Die) 介面間的節點匹配與應力傳遞精度。
1421 2
鄭鈞 Adam ??? 4月前
大巴山上的“空中芭蕾”——蓼子大橋轉體施工關鍵技術 
為配套轉體施工,獨立研發了一種可負載行走式拱上吊機。
4473 7 2
泡沫oO ??? 3年前
案例 | 火星漫游車的多體仿真 
團隊現在正在設計一種帶有轉向輪的新型漫游車(圖5),以便在執行任務時實現更好的機動性。Adams 被用于研究新型行走系統轉向機構的幾何結構。新的漫游車也通過參加 2019 年的歐洲漫游車挑戰賽進行了測試。
2652
Cruise ??? 3年前
小米發布仿生四足機器人“鐵蛋”!解讀背后的建模和仿真技術 
然后,為實現四足機器人穩定行走,需要實時地對四足機器人狀態進行分析和控制。Adams和Matlab的聯合仿真可實現這一過程。整個過程中Adams虛擬樣機作為被控制對象,需要從Matlab中獲得驅動數據。Matlab則需要虛擬樣機的實現狀態來調整控制程序。在相同的關節輸出力矩的情況下,腿的質量/轉動慣量越小,則被控響應速度越快。
2920
深圳北鯤云計算有限公司 ??? 3年前
《基于 RecurDyn 的四履帶足機器人運動學仿真》現已開放領取 
摘要: 應用多體動力學仿真分析軟件 RecurDyn 對四履帶足機器人進行全三維建模及越障過程仿真,并分析了履帶機器人行走過 程 中 的 力 學 模 型,仿真 結 果 動 態,準確的反映了四履帶足機器人行走機構的越障過程,驗證了四履帶足機器人行走機構較之雙履帶結構形式出色的越障能力,體現 了 RecurDyn 軟件在履帶機器人的動力學仿真分析方面的有效性和優越性 。1. 引言2.
2554
上海安世亞太 ??? 2年前
外骨骼機器人未來走向哪? 
而科大訊飛則在其2022年年會上公布“訊飛超腦2030計劃”,其中詳細描述了其具有康復訓練功能的外骨骼機器人“已經研發出原型機”這一進展。 科大訊飛表示,未來約在2023-2025年,將實現自適應運動功能研發的自適應行走外骨骼機器人,幫助行動不便的老年人或殘疾人自主獨立行走。 無論是創企的大額融資,還是巨頭的跨界研發,都展現出對于這一賽道的看好,背后的原因到底在哪?
3170
機械工程師 ??? 3年前
Moldex3D模流分析之螺桿分析模組 
ScrewPlus 是射出成型 CAE 的第一個內建螺桿分析。此模組由 Compuplast International Inc. (www.compuplast.com )與 CoreTech System Co., Ltd. 共同開發。使用者必須具備適當的授權碼,才能利用此強大的模組。螺桿塑化是其中一個受歡迎的方法之一,熔化是螺桿的剪切動作之一,可提供即將進入射出成型條件的熔件。
2202
Moldex3D 中國 ??? 1年前
磁性噴霧劑,簡單噴一噴即可快速“制造”機器人 (轉載) 
近日,來自香港城市大學(CityU)、中國科學院深圳先進技術研究院(SIAT)的研究人員及其合作者,成功開發出一種制造毫米級機器人(Millirobots)的簡單方法。該方法只需要將類似膠水的磁性噴霧劑噴在物體表面,就可以快速制造出一種運動可控且靈活的毫米級機器人。利用這種方法,在磁場的驅動下,被涂抹后的物體可以在不同表面上爬行、行走或滾動。
3025 91
琳泓comsol ??? 5年前
ZEMAX軟件技術應用專題:如何使用ZOS-API創建飛行時間用戶分析 
LiDAR(光探測和測距)是一種感測器技術,可通過測量發射光從周圍物體反射並返回到接收器所需的時間來幫助創建環境的3D數字地圖。這種3D映射作為自動駕駛汽車的關鍵使能技術在汽車行業變得越來越重要。在汽車行業之外,LiDAR用於移動設備,用於增強現實、測量距離以及模糊照片和影片中的背景等功能。
2080
w**elab86_Swsp ??? 3年前
移動機器人的分類及介紹
二、足式機器人 足式機器人以模仿生物的行走方式為特色,具備良好的地形適應性和運動靈活性。 雙足機器人:雙足機器人模仿人類行走方式,在復雜環境中的移動表現出高度的靈活性和適應性。在科研領域,雙足機器人被廣泛用于研究人類步態,通過模擬人類的行走、跑步、上下樓梯等動作,幫助科學家深入了解人體運動力學和神經控制機制,為康復醫學、運動訓練等領域提供理論支持。
2753
探索者第2號前來報到 ??? 1年前
魯渝能源四足機器人無線充電方案,量身定制,告別“趴窩”焦慮 
該方案并非“一款產品打天下”,而是根據用戶提供的電池參數進行精準選型與定制,確保每一臺機器狗都能獲得最適配的能量補給。 優勢一:完全無接觸,打破環境枷鎖魯渝能源無線充電系統采用全密封設計,發射器與接收器均無裸露電氣觸點。IP65防護等級,可有效抵御粉塵、水汽、鹽霧的侵蝕;無物理接觸,從根源上杜絕了觸點氧化、磨損、腐蝕等問題。
741
魯渝能源無線充電 ??? 18天前
【6/8更新】全球最大蜘蛛機器人,自重2噸,可以像玩游戲一樣遠程操控工作 
平時它的機械腳是用來行走的,6足的設定讓其擁有極高的穩定性,就算不是平坦的大馬路也能跨越障礙物,輕松行走。要操控這個蜘蛛機器人有兩種方式,一種是“有人駕駛”。人進駕駛艙,通過里頭的搖桿、按鍵操控。因為身上的關節太多了,因此蜘蛛機器人控制起來比較麻煩,需要專業的人士才能操縱。駕駛室里面除了兩根獨立的操縱桿之外,必須的控制按鈕多達28個。
2317
技術鄰CAD學習 ??? 3年前
20條/頁 
 7
7 跳至頁

技術鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP
