



203基于matlab的曲柄滑塊機構的運動學仿真分析GUI 
基于matlab的曲柄滑塊機構的運動學仿真分析GUI,包括《系統仿真與matlab》綜合試題文檔。分析滑塊速度、角速度,曲軸投影長。曲柄滑塊機構的動畫。程序已調通,可直接運行。
2221
matlab應用與學習 ??? 2年前
Matlab機械連桿機構運動學仿真:包含三桿滑塊機構\四桿\六桿 

詳細介紹了三桿滑塊機構和四桿機構運動方程的推導及matlab對上述機械連桿機構運動仿真,并實現機械連桿機構運動動畫的繪制,注:六桿機構無公式推導文本,只有代碼。如需模型推導說明文本及matlab源碼,請附件下載。
16
SimPC ??? 3年前
202基于matlab的曲柄滑塊機構的運動學仿真分析 
基于matlab的曲柄滑塊機構的運動學仿真分析,分析各個桿的速度、位移、加速度曲線,以及曲柄滑塊機構的動畫。程序已調通,可直接運行。
2152
matlab應用與學習 ??? 2年前
1-29基于matlab的曲柄滑塊機構的運動學仿真 
基于matlab的曲柄滑塊機構的運動學仿真,能有效仿真活塞運動。可更改曲柄滑塊機構參數。程序已通過調試,可直接運行。購買后可下載視頻中的源程序文件。
269
matlab應用與學習 ??? 1年前
25類滑塊經典結構:滑塊+滑塊、滑塊+斜頂、滑塊+頂針 
8.前模滑塊的抽芯樣式:19.前模抽芯滑塊樣式:210.油壓缸斜抽芯機構原理:11.母模側斜抽芯原理:12.后模斜抽芯機構原理:13.母模斜抽芯機構14.母模隧道滑塊結構原理:15.母模雙T槽抽芯結構原理:16.滑塊液壓缸抽芯延時結構:17.斜導柱帶運
4394
UG模具設計材料 ??? 3年前
25類滑塊經典結構:滑塊+滑塊、滑塊+斜頂、滑塊+頂針 
8.前模滑塊的抽芯樣式:19.前模抽芯滑塊樣式:210.油壓缸斜抽芯機構原理:11.母模側斜抽芯原理:12.后模斜抽芯機構原理:13.母模斜抽芯機構14.母模隧道滑塊結構原理:15.母模雙T槽抽芯結構原理:
2901
UG模具設計材料 ??? 4年前
雙工位雙向臥式框架伺服數控擠壓液壓機設計與開發 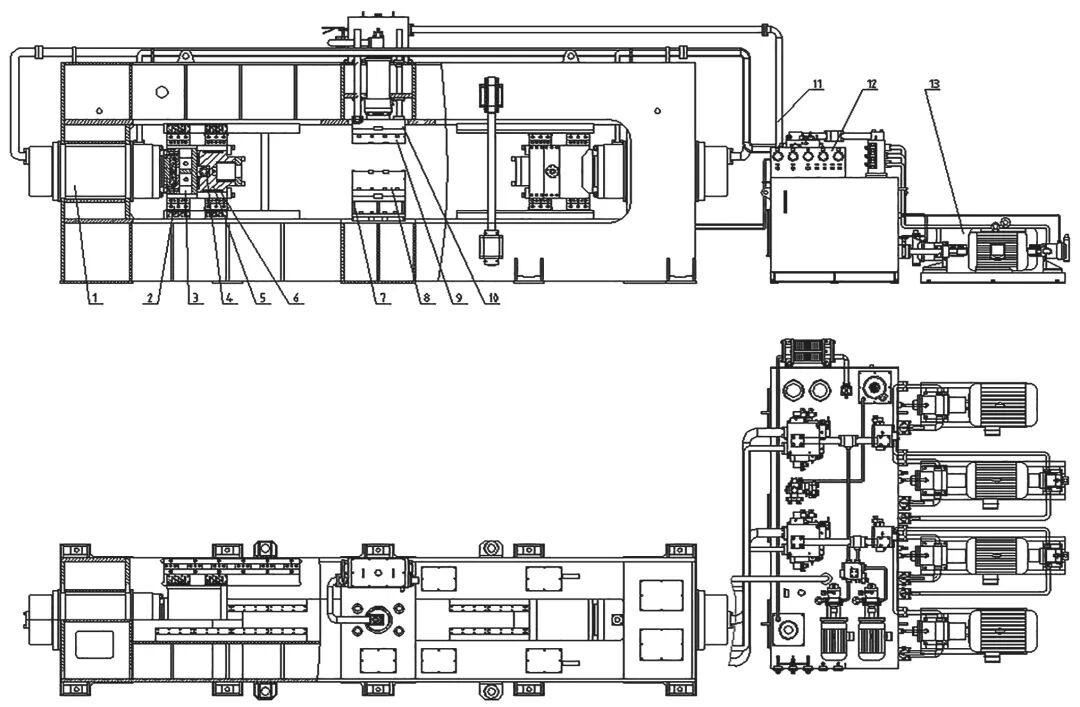
擠壓滑塊導軌機構內有高強彈簧和軸承等,以保證兩側的擠壓水平滑塊加壓運行時無振動、抖動,并且有效提高導軌的運行壽命。⑸雙工位模具機構包括換模油缸、換模滑塊、換模滑塊導軌、擠壓雙工位模具等。設有位置檢測裝置以及固定擋鐵等多層保護裝置,不到位下個動作不執行并且報警提醒。
3280 1
FMMM ??? 3年前
倒扣較大,汽車模的斜頂機構如何設計 
3)單桿類斜頂機構,汽車模用得最普片的一種,由斜頂頭、斜頂桿、導向套、斜頂滑腳組成,此類斜頂常用角度范圍3o-12o,角度不能超過15°,超過15°的使用雙連桿式斜頂機構。斜頂桿常用Φ16、Φ20、Φ25,如圖所示。
2776 1 1
UG模具設計材料 ??? 4年前
基于SolidWorks的自動裝卸機械結構設計 
2 自動裝卸結構設計 2.1 夾持機構設計 夾持機構使用直桿移動機構,滑塊使用電機驅動,通過曲 桿和直桿交點位置對滑塊所處位置進行控制,以此達到夾持目 的。為了提高整體裝卸系統的適用 性,利用機械式夾持機構的直桿式平 移夾持機構,動力源為電機,使用 4 片夾片。圖 1 為夾持機構運動示意, 構件 A 為曲線,構件 B 利用滑塊和 構件 A、固定直桿 C 連接。
4670 5
太極元氣 ??? 2年前
UG模具設計38種模具結構用心收藏版防止以后遇到 
急回機構雙節式斜銷外掛式斜銷母模斜銷內抽滑塊母模爆炸式滑塊頂塊頂出機構倒裝模如圖所示﹐當滑塊行程較大﹐不便在滑塊和模仁之間裝彈簧時﹐可在模具外側裝彈簧。如圖所示﹐成品結構特殊﹐不便排頂針﹐可改用頂塊頂出。
2997
UG模具設計材料 ??? 3年前
UG/NX 模具結構動態圖,收藏以后慢慢看~ 
側向分型與抽芯機構-滑塊-7 11. 單分型面注射模示意圖 12. 雙分型面注射模示意圖 13.
2341
張偉一 ??? 3年前
牛頭刨床機構分析 
數學模型已知牛頭刨床主運動機構各構件的尺寸為:l1=125mm,l3=600mm,l4=150mm,l6=275mm,l'6=575mm,原動件1以勻角速度ω1=1rad/s逆時針轉動,計算該機構中各從動件的角位移、角速度和角加速度以及刨頭5上E點的位置、速度和加速度,并繪制出運動線圖2. matlab代碼function main% 輸入已知數據clear;i1=0.125;i3
2694
FE-有限元鷹 ??? 3年前
matlab與Adams的機械臂運動學驗證 
游戲手柄結構化網格劃分 四、聯合仿真 Hypermesh與ABAQUS聯合的殼體結構仿真分析 Hypermesh與ABAQUS聯合的模態分析 Hypermesh與ABAQUS聯合的靜力學仿真分析 Hypermesh&Ansys&Adams曲柄滑塊機構剛柔耦合分析
2971 1 1
木火柴 ??? 4年前
MATLAB/ADAMS求解動力學 
CASE1采用ode45求解動力學方程adams后處理及數據導出MATLAB數據導入提供matlab文獻繪圖模板CASE2四桿機構運動學基礎采用simulink求解運動學方程、求解機構鉸鏈約束內力SIMULINK——ADAMS聯合仿真過程及注意事項 CASE3(曲柄滑塊)拉格朗日動力學構建方法采用simulink
1029 3
偉_sss ??? 5年前
一大波棘輪動畫,十分珍貴! 
↓↓ 雙動棘輪(Double Acting Ratchet Wheel):雙動棘輪係由二驅動爪交替間歇推動棘輪,不管搖桿左右擺動,都可以使棘輪往一定方向旋轉,沒有單爪棘輪之無效時間,故可產生近似連續之旋轉輸出運動。較單爪棘輪、雙爪棘輪節省時間。↓↓ 可逆棘輪(Reversible Pawl,又稱回動棘輪):棘輪可視需要作正、反兩方向之旋轉。
2688
機械學霸 ??? 3年前
跟大咖學設計 · 第24期 | 小噸位季軍-大象隊作品詳解 
比如,在型芯位置增加快換和防退縮機構,避免長時間使用后發生微小位移,保證尺寸精度和模具安全;同時,在模架上增加排屑漏油孔槽、防塵板及位置檢測機構,用于處理離型劑積水、雜質進入以及頂針未復位就觸發滑塊動作等問題。我們做這些細節,是希望模具在現場長期生產中更安全、更穩定,也更方便維護。
1114
Supreium適創科技 ??? 28天前
可懸停撲翼飛行器研究現狀與關鍵技術 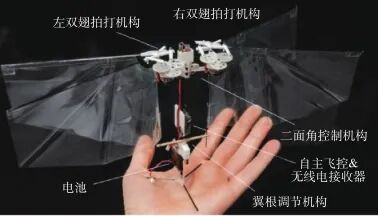
考慮到曲柄滑塊機構是非對稱機構,其在前進和返回行程之間有不同的速度,因此在第一級輸出端添加了一組桿交叉機構,減少了曲柄滑塊機構的不對稱特性并放大了輸出幅值,如圖7(a)所示。使用多體系統動力學仿真軟件對機構進行柔性多體動力學分析以分析結構可靠性。
8322 3 1
我愛飛機 ??? 2年前
【5/22更新】25個簡單易懂的機械原理動圖 
▼曲柄搖桿機構▼雙曲柄機構▼蝸輪蝸桿傳動▼Zb固定 行星輪系1▼D點固定 運動停止▼給定軌跡的插秧機▼曲柄搖桿與搖桿滑塊串接機構▼皮革拋光機▼雙肘桿夾緊機構▼
2494 1
技術鄰CAD學習 ??? 4年前
淺析無人機仿真技術 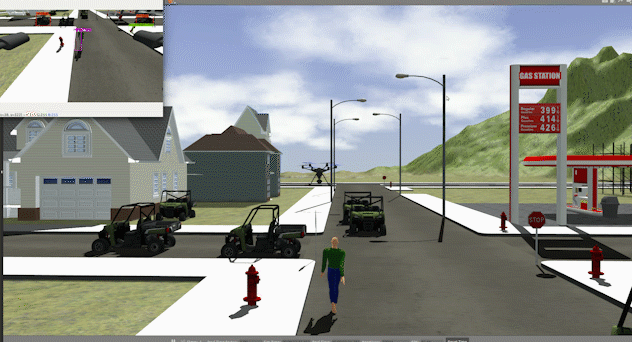
對于第二種方式,采用MATLAB的實時工具箱RTW實現控制任務,專用的實時內核代替Windows操作系統接管了實時控制任務,大大提高了系統的實時性,這種方式又分為單機型的Real-Time Windows Target方案和雙機型的xPC Target方案。
4683
無人機圈 ??? 2年前
Amesim電磁鐵仿真:電磁鐵結構參數設計優化的新方法 
由于渦流、磁滯以及磁飽和等非線性因素,電磁機構的設計優化具有一定的復雜性。計算機輔助求解技術(Computer Aided Engineering, CAE)能夠縮短設計周期,減小設計成本,在電磁鐵的參數優化方面最常用的方法是有限元法和基于Matlab語言的Simulink建模方法。
2811 1
技術哥 ??? 3年前
20條/頁 
跳至頁

技術鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP
