摘 要:可懸停撲翼飛行器模仿自然界定點滯空昆蟲和鳥類的飛行特點,隱蔽性高、靈活機動、應用環境多樣,具有突出的理論和實用價值,引起了世界范圍的廣泛關注。對可懸停撲翼飛行器的研究現狀和發展方向進行了綜合評述。首先總結了近年來最突出的研究成果,按照微撲翼尺寸分類分別介紹MAV、NAV、PAV尺度下可懸停撲翼微飛行器的樣機構型、動力系統、質量分配與飛行性能,統計了升力、翼展、質量、撲翼幅值等重要參數,介紹了電機、壓電和電磁驅動撲翼微飛行器最具代表性的研究工作;然后針對目前飛行器研究運用的升力產生原理、飛行穩定性分析、功耗效率優化、續航能力等關鍵技術進行了分析和總結;最后討論了撲翼飛行器亟待突破的技術難題和未來發展方向。
關鍵詞:
仿生;懸停;微型飛行器;機器人;微加工技術;撲翼;飛行原理
近年來,航空科學的發展極大拓寬了人們的視野,提高了人們研究飛行器的興趣。目前主流飛行器分為固定翼飛機、旋翼機和撲翼機[
1-2
]
。固定
翼飛機是目前應用領域最廣泛、研究最為成熟的機型,在民生、商業、軍事、娛樂等領域發揮了巨大的作用。旋翼機利用多組螺旋槳產生的合力克服重力并提供不同方向力矩以實現自由飛行,旋翼機可以懸停的特點使其在航拍、農業、軍事偵察等領域發揮出巨大的作用。撲翼飛行器(Flapping Micro Air Vehicles,FMAVs)一般由翅膀、撲翼機構、機身骨架、控制系統組成。撲翼飛行器模仿鳥類和昆蟲的飛行原理,通過往復拍打翅膀獲得升力以克服重力,能做到真正意義的仿生,對于解釋鳥類和昆蟲的飛行機理具有重大意義。在昆蟲和鳥類尺度下,相比于旋翼機,撲翼運動的效率更高,靈活性更強,可以在隱蔽偵察、抵近引導攻擊、狹窄空間內的搜救以及探索工作中起到重要作用
[
3-6
]
。
不同于旋翼機多電機間耦合控制,懸停撲翼飛行器的懸停功能分為有尾懸停和無尾懸停。有尾懸停方式是以仿鳥類飛行器為基礎發展的,尾巴起到安定面的作用,可以提高飛行器豎直飛行時的阻力面積,從而實現懸停功能。無尾懸停模仿自然界中的昆蟲或蜂鳥,實現真正意義上的仿生懸停功能,這種懸停方式往往依靠控制舵機調節尾緣或變換撲翼平面實現[
5-7]。
美國國防預先研究計劃局、美國航天局是最早在微型撲翼飛行器領域上涉足的單位,并扶持美國航空環境公司研發出Nano Hummingbird仿蜂鳥無尾可懸停撲翼機器人[8]。近年來,可懸停的撲翼飛行器引起了人們的廣泛重視。荷蘭代爾夫特大學的DelFly Nimble[9],韓國建國大學的KUBeetle-S[10],美國普渡大學的Hummingbird Robot[11],新加坡國立大學的Nus-Robotic bird[12]均有不俗表現。
本文介紹了可懸停撲翼飛行器的國內外研究現狀,并從升力產生原理、飛行穩定性分析、功耗效率優化、續航能力等方面對可懸停撲翼飛行器的關鍵技術進行了分析。昆蟲、蜂鳥尺度下的懸停飛行是飛行器領域中的重要研究方向,其發展能極大地推動軍事偵察、災難搜救、狹窄空間探測救援等軍事應用行業和民生應用行業的發展。
自然界中的撲翼飛行具有無可比擬的機動性、敏捷性和懸停能力。在過去的幾十年里,工程師們受生物飛行的啟發,在撲翼微型飛行器的設計方面取得了顯著的進展[7]。根據翼展和機身質量,所有常見的FWAVs通常可分為微型級飛行器(Micro Air Vehicle,MAV,翼展<1 m,質量<2 kg)、納級飛行器(Nano Air Vehicle,NAV,翼展<75 mm,質量<10 g)和皮級飛行器(Pico Air Vehicle,PAV,翼展<50 mm,質量<500 mg)[8]。MAV尺度撲翼飛行器可定點盤旋,部分能實現懸停及豎直飛行;NAV尺度基本以小型鳥類和大型昆蟲作為研究對象,能實現懸停和垂直起降;PAV尺度以昆蟲作為研究對象,目前可實現克服重力起飛,但距離完全自主飛行仍有較大差距。本文將根據不同尺度類別對世界上著名研究機構的撲翼飛行器進行介紹。
MAV尺度下的懸停飛行器根據翅膀布局分為八翅撲翼、四翅撲翼和雙翅撲翼。多翅撲翼載荷更大,飛行時間更長,具備靈活飛行的潛力,在世界范圍引起廣泛關注。荷蘭代爾夫特大學在2018 年模仿果蠅的飛行特點制作了一種連桿驅動四翅撲翼飛行器[9]。盡管最終的樣機尺寸是果蠅的55倍,但該款飛行器可以成功模仿果蠅靈活的飛行機制。該樣機質量為28 g,翼展為33 cm,翅膀長度14 cm,懸停時撲翼頻率約為17 Hz,能實現7 m/s的最大速度和4 m/s的側向飛行。如圖1所示,樣機由左右兩套撲翼機構組成,每套撲翼機構由一個電機驅動,電機通過減速齒輪將動力輸出至兩個曲柄上,通過曲柄搖桿機構實現每套撲翼機構上的兩個翅膀的往復運動。撲翼機通過調整翅膀拍打模式產生圍繞身體三個軸的扭矩,旋轉翅膀根部舵機扭轉翅根可以產生偏航軸控制力矩;旋轉機身頂部舵機可以改變左右撲翼中間位置,從而產生俯仰軸控制力矩;改變兩側電機轉速,引起左右翅膀的升力差可以產生翻滾軸控制力矩,從而實現機身自由飛行。
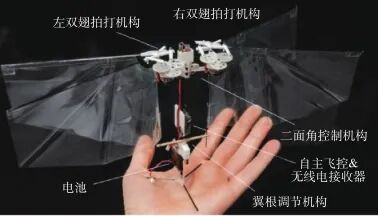
圖1 代爾夫特大學研制的仿昆蟲FMAV——Delfly nimble[9]Fig.1 Insect imitation FMAV developed by Delft University—Delfly nimble[9]
2020年,南洋理工大學通過模仿雨燕的飛行特點設計了X翼撲翼飛行器[13]。該飛行器質量26 g,機身長度200 mm,每個翅膀長為280 mm,采用無刷電機經過齒輪箱增加扭曲而驅動兩組曲柄搖桿機構。如圖2(a)所示,齒輪旋轉軸采用滾珠軸承與碳纖維外殼固定,這樣做可以減小軸系傳動的彎曲變形從而提高無刷電機的負載扭矩和傳動效率。機翼根部加入兩個柔性尼龍鉸鏈,通過儲存拍打過程中的能量以補償機翼在拍打逆轉階段減速時的動能,將機翼固定在機身上也有助于抑制撲翼引起的搖擺運動。依靠高效率的傳動機構,該飛行器可通過調節尾翼的升降舵實現四翅樣機的懸停、加速和空中滑翔運動。該樣機可在15 Hz撲翼頻率下產生近40 gf的靜態推力,最大飛行速度為8 m/s,最大加速度為31.4 m/s2。
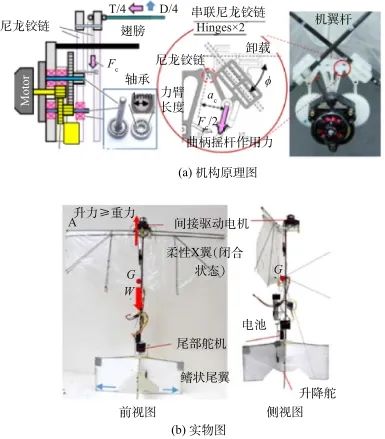
圖2 仿雨燕尺寸微型撲翼飛行器[13]Fig.2 Imitation swift scale MAV[13]
新加坡國立大學在2018年設計了四翅撲翼機Nus-Robotic bird[12]。該樣機采用兩組曲柄滑塊與滑塊搖桿組合撲翼機構。無刷電機作為動力源,通過1∶20的減速齒輪箱將動力傳輸到輸出曲柄上。每兩個翅膀組成一組撲翼機構,每個翅膀可以產生90°拍打角度。如圖3所示,樣機通過改變左右撲翼機構的撲翼平面角度產生俯仰軸、翻滾軸、偏航軸的控制力矩,以實現完全可控飛行。該飛行器質量27 g,翼展22 cm,懸停時撲翼頻率為13.3 Hz,飛行速度可達5 m/s,持續飛行時間為3.5 min,可搭載4.5 g載荷,可實現定點爆破飛行和視距外可控飛行。
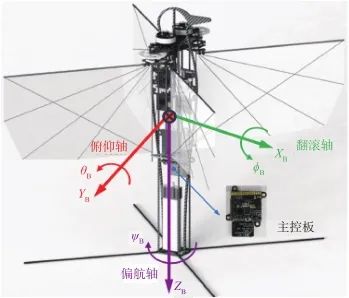
圖3 新加坡國立大學四翅懸停FMAV[12]Fig.3 National University of Singapore Four Wing hover FMAV[12]
代爾夫特大學在2018年研制了一款八翅可懸停飛行器,如圖4所示,采用四組撲翼機構配置,每組撲翼機構由一個電機驅動,調節四個電機的速度可以產生俯仰、翻滾、偏航軸控制力矩[14]。整機質量37.9 g,翼展28 cm,撲翼頻率為15 Hz,連續飛行超過9 min,飛行速度可達3.5 m/s,八翅撲翼飛行器在向前飛行時比四旋翼樣機更有效率,增加了航程和續航能力。此外,機翼表面會產生阻力可以提高減速性能。這意味著與四旋翼飛行器相比,八翅撲翼飛行器能夠更快地實現減速,具備很強的實用價值。
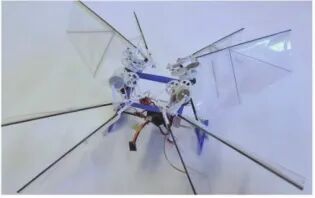
圖4 代爾夫特大學八翅FMAV[14]Fig.4 Four pairs of wings FMAV, Delft University[14]
兩翅撲翼飛行器相較四翅和八翅撲翼升力獲取難度更大,穩定性控制難度更大,但仿生效果更好,更加具備理論研究價值。美國航空環境公司于2012年展示了一款仿蜂鳥撲翼飛行器nano-hummingbird[8]。該飛行器在設計過程中進行了翅膀形貌優化以獲得更高效率,它的質量為19 g,翼展為16.5 cm,撲翼頻率為30 Hz,能夠懸停,能以6.7 m/s的速度向前飛行并向遠程地面站傳輸實時彩色視頻,是世界首款兩翅構型的可自主飛行并實現懸停功能的無尾飛行器。翅膀的設計遵循最大升力功率比目標,以獲得最優的效率,提升飛行時間,最終設計的翅膀可以達到9.4 g/W的升力功率比。撲翼機構的設計嘗試了連桿機構和線傳動機構的形式,考慮到連桿機構撲翼幅值有限,最終采取線傳動作為撲翼機構形式,如圖5所示,機構撲翼角可達200°。為了實現飛行器自由可控飛行,嘗試了改變拍打攻角和翅膀變形的方式產生控制力矩,經過實驗發現通過調節尾緣造成翅膀變形可以獲得更大的控制力矩,最終選擇采用改變尾緣的控制方式。此外,設計了齒輪組控制機構,克服了翻滾力矩與俯仰力矩控制耦合的問題。該飛行器為后續可懸停撲翼機的設計提供了設計范例。

圖5 美國航空環境公司設計的納米蜂鳥機器人[8]Fig.5 Nano Hummingbird designed by AeroVironment Inc.[8]
2015年,德克薩斯A&M大學的Coleman等嘗試使用五連桿設計懸停撲翼飛行器[15]。該樣機采用曲柄搖桿機構并加入第五連桿將搖桿的撲翼幅值放大,可將搖桿輸出端40°的拍打角放大至120°,該樣機質量為62 g,采用11.1 V電池作為動力源,由2900 kV無刷電機驅動,通過優化翅膀根部墊片寬度和墊片碳纖維疊合層數確定了墊片寬度為1.5 mm,樣機如圖6。三層疊合時單個翅膀可在20 Hz的撲翼頻率下產生33 gf升力。樣機可以22 Hz的撲翼頻率克服重力,起飛上升1 m并成功懸停5 s,是已知質量最大的可懸停兩翅撲翼機。
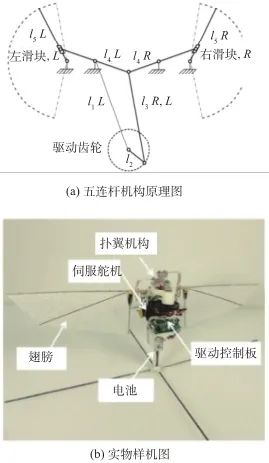
圖6 德克薩斯A&M大學的MAV尺度飛行器[15].Fig.6 Texas A&M University MAV-scale aerial vehicle[15]
韓國建國大學的Jeon等在2016年設計了一種六連桿仿蜂鳥撲翼機構,并制作出樣機。其設計樣機質量目標為20 g,翼展目標為150 mm[16]。使用準穩態葉素理論(Unsteady Blade Element Theory)預測法估算出能夠產生足夠升力且適合的拍動幅度為150°,驅動頻率為37 Hz。考慮到曲柄滑塊機構是非對稱機構,其在前進和返回行程之間有不同的速度,因此在第一級輸出端添加了一組桿交叉機構,減少了曲柄滑塊機構的不對稱特性并放大了輸出幅值,如圖7(a)所示。使用多體系統動力學仿真軟件對機構進行柔性多體動力學分析以分析結構可靠性。最終設計撲翼機構的質量約為8.3 g,撲翼幅值為160°,撲翼頻率為23 Hz,測試得到14 gf的垂直升力,如圖7(c)所示,實現了撲翼機構克服重力起飛。
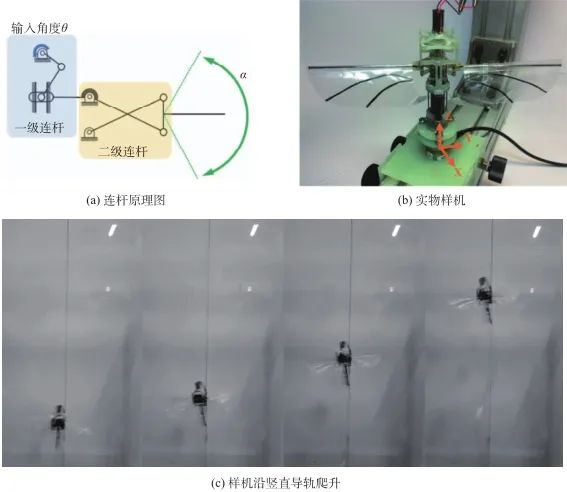
圖7 韓國建國大學設計的六連桿仿昆蟲FMAV[16]Fig.7 A six-link insect-like FMAV designed by Konkuk University in South Korea[16]
北京航空航天大學2020年研究獨角仙的形態學和運動學特點,發現拍打翅膀的動作是由其骨骼內結構與相關肌肉的結合實現的[17]。用連桿模仿獨角仙胸腔肌肉設計了二級連桿式撲翼機構。二級連桿由曲柄連桿機構和雙搖桿機構組成,以曲柄搖桿機構輸出搖桿的最小傳動角為目標,使用仿真軟件對連桿尺寸進行優化,增加了連桿機構的平穩性,減小了急回特性,實現了120°撲翼。選用1020無刷電機作為動力源,連接12∶1傳動比的聚甲醛樹脂材料齒輪減速箱放大扭矩,采用高強度纖維布材料作為翅膜、碳纖維棒作為翅脈制作翅膀。樣機重心位于雙翼氣動中心軸線上,在垂直方向上的偏差0.68 mm。制作的樣機翼展190 mm,質量23.1 g,在10 W功率輸入下實現27.8 gf升力,成功克服重力起飛。
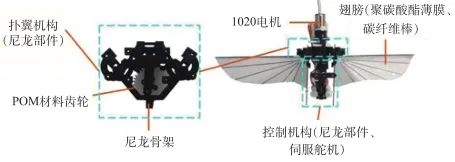
圖8 北京航空航天大學仿獨角仙FMAV實物圖[17]Fig.8 Physical picture of FMAV imitation allomyrina dichotoma at Beihang University[17]
上海交通大學對線傳動撲翼機構進行了研究,分別設計了線傳動兩翅和線傳動四翅撲翼樣機。該樣機采用模塊化設計方法,將撲翼飛行器劃分為不同模塊,從質量分配角度整理了子模塊參數設計方法,完善了設計流程。利用葉素法的準穩態氣動力模型分析撲翼飛行的氣動力和力矩。采用多驅動器并聯控制機構,降低驅動器負載,提高控制角度的幅值。對于兩翅飛行器并聯機構的耦合問題,利用變撲翼平面和尾緣調節的方法進行飛行控制;對于四翅飛行器的控制矩陣非線性耦合問題,利用了基于撲翼平面與撲翼頻率調節的控制方法。兩翅飛行器如圖9(a)所示,質量為28 g,翼展21 cm,撲翼頻率25 Hz,在11 W功耗下最大升力可達34 gf。可實現懸停、掌上起飛與定點回收[18]。四翅飛行器如圖9(b)所示,質量為38.4 g,撲翼頻率為25 Hz,翼展24.5 cm,在16 W功耗下最大升力可達50 gf,撲翼機構與機身最大擺角可呈90°,能實現機身水平狀態下的垂直起飛[19]。
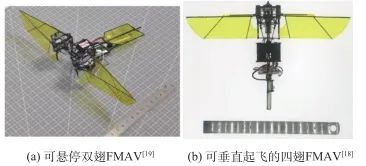
圖9 上海交通大學設計的線傳動FMAVFig.9 String-based FMAV designed by Shanghai Jiao Tong University
韓國建國大學在2012年模仿甲蟲飛行機制設計撲翼機構,通過考慮靜態力平衡,從理論上研究了重心(Gravity Center,GC)和平均氣動中心(Aerodynamic Center,AC)的相對位置對垂直飛行的影響。進行了垂直起飛試驗,在這些試驗中,使用非定常葉素理論來確定平均AC的位置[20]。證明了通過控制重心和撲翼系統平均AC之間的相對位置,可以獲得垂直起飛的俯仰被動穩定性。如圖10(a)所示,2015年實現了翼展為12.5 cm、質量為7.36 g的仿昆蟲撲翼微型飛行器的無控制垂直起飛。翅膀撲翼幅值為150°,撲翼頻率為43 Hz。翼展為12.5 cm,使用非定常葉素理論計算和測量的三維機翼運動學,得到垂直力的平均氣動力中心的位置位于翼展展向46%位置。飛行器重心的垂直和水平力的力臂幾乎為零,以減小俯仰力矩[21],在43 Hz撲翼頻率下可實現0.94 m/s的起飛速度。2017年,他們設計了仿甲蟲兩翅飛行器KUBeetle,采用曲柄連桿機構配合線傳動放大機構,實現了190°撲翼角度,如圖10(b)所示[22]。樣機質量為21 g,在33 Hz撲翼頻率下產生29 gf的升力。三個舵機分別通過調節尾緣的位置產生俯仰、滾轉和偏航力矩。采用比例-微分(Proportion-Differentiation,PD)控制實現了飛行主動穩定性。實驗表明該樣機可以成功地進行垂直爬升,然后在0.3 m高的地面半徑內懸停。如圖10(c)所示,2019年他們對飛行器進一步減重,令飛行器質量達到16.8 g,翼展170 mm,高度75 mm,在23 Hz撲翼頻率下產生18.5 gf的升力[10]。其提出了擺頭力矩控制方案,依靠撲翼機構相對于機身的轉角使升力與重力產生夾角,從而產生控制力矩,在俯仰軸轉動-15°~15°范圍時可產生-4.2~2.7 N·mm的控制力矩;在翻滾軸轉動-15°~15°范圍時可產生-2.8~2.6 N·mm的控制力矩;在偏航軸轉動-20°~20°范圍時可產生-0.3~0.5 N·mm的控制力矩,整機可成功懸停約3 min。2020年他們通過裁剪翅膀根部的方式減小翅膀面積,減小了阻力功耗,并且換用質量更小的舵機,3個舵機系統總質量僅1.8 g,使整機質量減小到15.8 g,飛行器翼展20 cm,傳動比1∶28[23],如圖10(d)所示。使用3.7 V電池作為電源,避免長時間工作時驅動電機過熱,飛行器在3.7 V電壓作用時產生1.34的峰值升重比。飛行測試表明,使用所選機翼的飛行器可以懸停8.8 min。
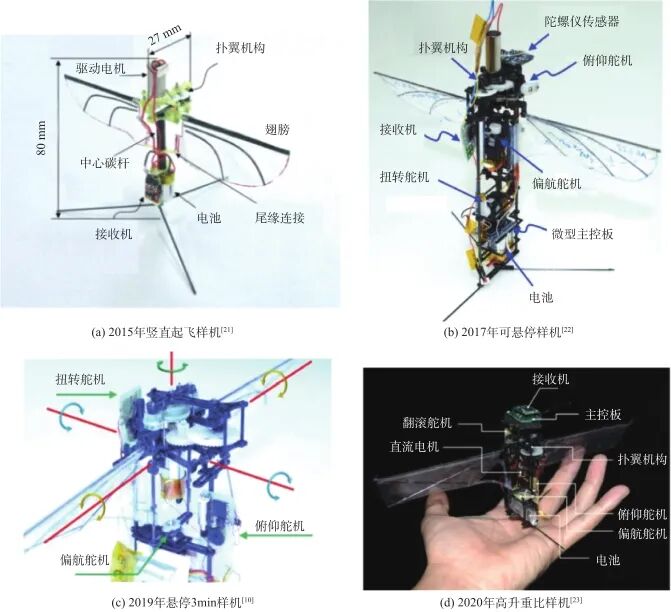
圖10 韓國建國大學線傳動FMAV各年份迭代版本實物圖Fig.10 Figures of iterative versions of string based FMAV of Konkuk University in different years
普渡大學在2013年提出了一種電機直接驅動的撲翼翅膀的撲翼方案,機翼由直流電機直接通過齒輪傳動驅動,通過電機往復運動獲得撲翼角度,如圖11(a)所示[24]。撲翼機構由兩個電機驅動,翅膀與電機間加入一根彈簧,令撲翼過程變為二階阻尼系統的受迫振動響應。翅膀由中間位置向兩側減速運動時,彈簧被壓縮,儲存能量;機翼由撲翼幅值向中間運動時,彈簧釋放能量,為翅膀加速,從而節省電機功耗。調節彈簧剛度系數可以將系統固有頻率與輸入頻率保持一致以獲得最大振幅,從而獲得最大升力。
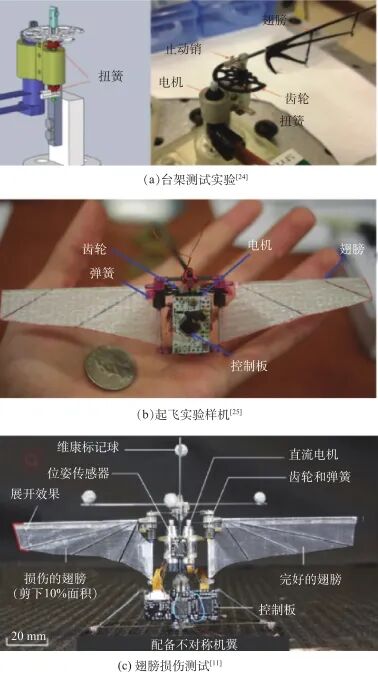
圖11 普渡大學電機直驅兩翅實物圖Fig.11 Physical prototype of Purdue University motor direct drive two wings
2017年,他們將撲翼動力學建模為一個受迫非線性共振系統[25]。利用線性近似方法,導出了穩態撲動幅值、能量和固有頻率、阻尼固有頻率和峰值頻率的特征頻率的解析解。提出了撲動共振的理論分析,重點關注其對穩態響應、升力產生和負載功耗的影響,研究表明:撲動角速度峰值出現在系統以固有頻率驅動時;最大升力出現在固有頻率,而不是峰值頻率;效率最大值出現在固有頻率處,而不是峰值頻率處。通過撲翼機構搭載翅膀進行實驗,驗證了模型和分析。
同年他們提出了考慮尺寸、質量和功率限制下設計電機直驅兩翅撲翼樣機的方法,建立了動力學、飛行穩定性和主動控制策略等理論模型,利用剛性和柔性機翼不同撲翼頻率的載荷數據進行了驗證[26]。如圖11(b)所示,飛行器總質量12.5 g,撲翼頻率40 Hz,撲翼幅值為150°,最大升力20 gf,翼展170 mm,翅膀使用兩個質量2.5 g、直徑6 mm的無刷直流電機驅動,翅膜使用3 μm薄的聚酯薄膜,飛行器可以克服重力起飛。
2021年他們分析自然界昆蟲的翅膀能夠在一定程度上對稱和非對稱損傷的特點,建立了翅膀破損條件下的飛行模型,如圖11(c)所示[11]。從昆蟲的自適應能力獲得靈感,量化機翼運動學、控制力矩偏移和氣動阻尼變化,在機翼完好和損壞的飛行試驗中對撲翼微型飛行器的機翼損傷的影響進行了研究。與完好機翼相比,受損機翼為了補償升力損失和扭矩失衡,導致了撲翼幅值的增大,引起功耗的相應增加。與對稱情況相比,非對稱損害通常需要更多的額外控制努力來實現飛行穩定。此外還分析了翅膀損傷對于升力、控制力矩和飛行動力學的影響,建立了不完全翅膀的系統控制模型。最終,撲翼機即使在單邊最大升力損失約22%的情況下,也能保持飛行能力,這一結果與飛蛾懸停時處理扭矩不對稱的能力(22.3±7.8%)相當。
由于NAV尺度的質量和翼展過小,現有技術很難做到完整飛行器自由懸停飛行,一些研究機構在這個尺度上做出了嘗試。韓國建國大學模仿甲蟲設計了微撲翼飛行器,該系統在尺寸、撲動頻率和翅膀運動學方面模仿甲蟲。使用了蘇格蘭軛機構和連桿的組合系統,將
電機的旋轉運動轉換為撲翼運動[27]。被動翼旋轉機構通過柔性構件集成在撲翼機構中。撲翼機構由鋰電池(3.7 V,180 mAh)供電,用于拍擊測試,如圖12所示,它可以在17 Hz的撲翼頻率下產生148°的拍打角,105°的扭轉角,在約束條件下的最大平均前進速度為360 mm/s。拍動試驗和力的測量證實,翼的旋轉顯著地有助于力的產生,從而有助于產生向前的速度,并且拍動器在拍動運動期間可以產生大約2 gf的正的平均垂直力。該飛行器質量為10.26 g,翼展為12.5 cm。
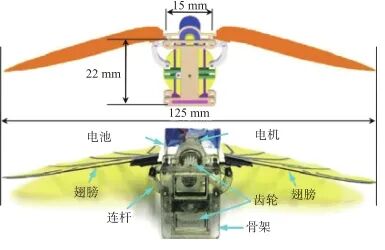
圖12 三維CAD模型和撲翼機構裝配圖[27]Fig.12 Three dimensional CAD model and fully assembled flapper[27]
哈佛大學模仿雙翅目昆蟲胸部機構非線性剛度的特點設計了柔性撲翼機構[28]。這種胸腔機構由剛性板和聚酰亞胺薄膜鉸鏈連接而成,形成一個封閉的殼體結構。它具有非線性增加的剛度,因此可以在接近末端沖程時使機翼快速減速,并隨后幫助機翼反轉,如圖13所示。撲翼機構質量為3.51 g,翼展10 cm,撲翼幅值158°,采用連桿機構傳遞動力。實驗表明,在25 Hz時,撲翼系統僅將總機械功率的2%消耗在慣性功率上;相比之下,當相同翅膀以相同的頻率拍打時,沒有彈性儲能的剛體機構將總機械功率的23%消耗在慣性功率上。說明系統內部的柔性關節可以緩沖25 Hz的10 cm翼展撲翼運動的慣性功率。與剛體撲翼機構相比,由于具有彈性能量存儲的能力,這種柔順的撲翼機構在產生相同推力的情況下節省了20%~30%的功率消耗。
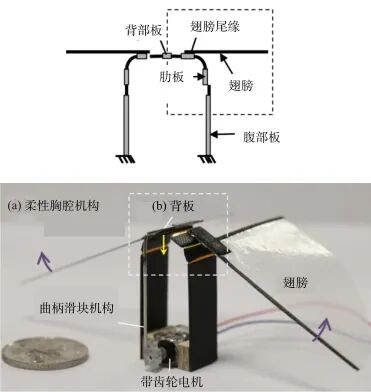
圖13 哈佛大學設計的具有集成聚酰亞胺薄膜鉸鏈的柔順胸部機構[28]Fig.13 Compliant thoracic mechanism with integrated polyimide film hinges designed by Harvard University of Technology[28]
卡內基梅隆大學提出了一種新穎的撲翼微型飛行器的設計。兩個機翼各由一個電機直接驅動,利用一個彈性元件回收能量,實現完整的彈簧阻尼系統。樣機如圖14所示,翅膀長度7 cm,質量2.7 g,在10 Hz時的最大升重比為1.4[29]。獨立的直接驅動機翼允許系統共振并控制單個機翼的拍動角度,減少必要的功耗,并允許產生翻滾和俯仰機身扭矩。可以單獨調節左右翅膀的輸入角度和電壓幅值以實現角度控制。
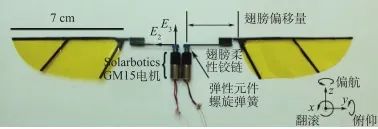
圖14 卡內基梅隆大學研制的雙電機直驅仿昆蟲FMAV [29]。Fig.14 FMAV driven by double motors developed by Carnegie Mellon University[29]
PAV尺度飛行器往往以壓電、電磁驅動為主,這類飛行器質量不大于500 mg,翼展小于50 mm,需要外接電源和升壓電路以克服重力起飛。
2013年,哈佛大學的Ma等設計了“RoboBee”機器人,最早實現了壓電驅動的厘米尺度微飛行器的控制飛行。為了實現飛行器的小型化,研究團隊研發了專用的雙晶壓電驅動器,通過碳纖維與聚酰亞胺復合的柔性關節傳動系統,實現了微飛行器的翻滾、俯仰、偏航多自由度飛行力矩控制。如圖15(a)所示,該樣機質量約80 mg,采用300 V電壓交流驅動壓電驅動器,通過柔性鉸鏈傳動系統,最終單個翅膀撲翼頻率大概在110~120 Hz之間,整體最大可以產生大于1.3 mN的升力,且飛行功耗大概在19 mW,可以實現在監控環境下的懸停飛行,是已知可懸停撲翼微型飛行器最早的成功研究[30]。
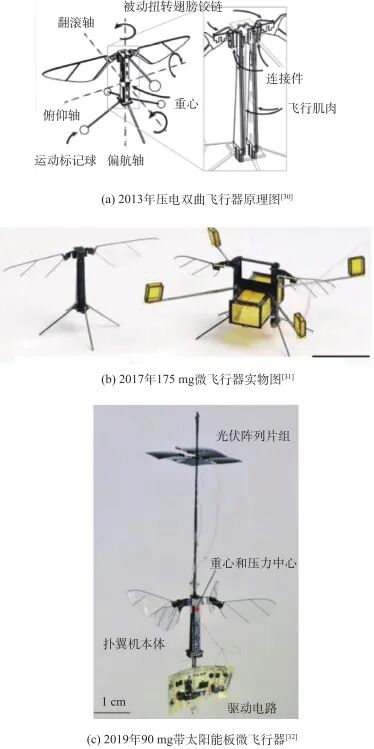
圖15 哈佛大學壓電PAV機構Fig.15 Harvard University piezoelectric PAV mechanism design
哈佛的研究團隊在后期對微飛行器的功能拓展研究做了進一步探討,2016年研究團隊通過構建電吸附結構實現了微飛行器對于墻壁的吸附功能,這使得飛行器可以實現在特殊環境中的停留。2017年Chen等針對RoboBee的空氣-水界面突破問題做了研究。研究者構建了一臺質量175 mg的微飛行器,通過微型電解器實現化學蓄能,如圖15(b)所示,并實現飛行器從水面到空氣中的表面張力克服功能[31]。2019年Jafferis等進一步改進了RoboBee的飛行器結構,如圖15(c)所示,采用太陽能供電的方式實現了微飛行器的自供能飛行任務,是迄今為止第一個實現無系繩的最輕的飛行器[32]。
南加利福尼亞大學的Yang等,在RoboBee的研究基礎上研發了一種四翅微飛行器。如圖16所示,研究團隊采用了與RoboBee相似的傳動結構,構建了一種孿生單晶壓電驅動器,滿足四個翅膀的相互獨立驅動。當將執行器的數目從兩枚增加到四枚時,對于飛行器的直接輸入控制可以實現翻滾、俯仰、偏航以及升力四個輸入。此外四翅結構可以抑制雙撲翼結構的偏航自由度旋轉擾動[33]。該樣機質量約95 mg,可以實現四個撲翼翅膀的分別獨立驅動,研究仍在進一步探討控制策略以達到更高的推力比,并嘗試實現更加復雜的飛行任務。
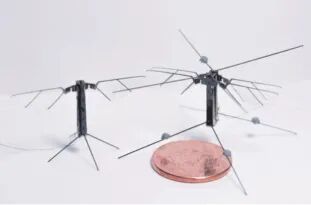
圖16 南加利福尼亞大學的四翅仿蜜蜂飛行器(右)與兩翅飛行器(左)對比圖[33]Fig.16 Compared of the University of Southern California's four-winged bee-like aircraft (right) and two-winged aircraft (left)[33]
2016年,上海交通大學設計了國內首款壓電驅動雙翅撲翼微飛行器,如圖17(a)所示,機器質量84 mg,翼展35 mm,在100 Hz的共振翼拍頻率下,可以產生足夠的推力,以約±60°的拍動振幅起飛[34]。壓電驅動器的設計考慮了電氣隔離和裝配問題。變速器和機身被集成為一個部件,以避免裝配困難。翼脈纖維方向布置合理,具有較高的強度和剛度。實驗結果表明,該壓電驅動器具有良好的性能;成功避免了變速器和機身之間的裝配;通過合理排列碳纖維的纖維方向,獲得了高性能的人造翅膀。
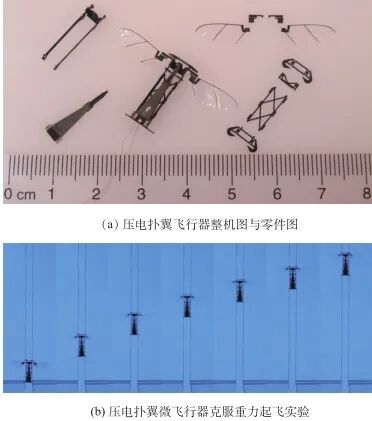
圖17 上海交通大學壓電撲翼微飛行器[34]Fig.17 Piezoelectric flapping wing PAV of Shanghai Jiao Tong University[34]
除了壓電雙晶片驅動方式驅動的微飛行器以外,例如像電磁撲翼驅動、介電彈性體驅動等方案也被來自不同研究所的研究者嘗試。2016年上海交通大學Zou等提出了一種以電磁驅動為驅動方案的微飛行器,并實現了飛行器的克服重力起飛實驗[35]。如圖18所示,該樣機質量大約在100 mg以下,撲翼拍動頻率大概在80 Hz左右,可以實現約±70°的撲翼幅度,實現了世界上最小的電磁驅動撲翼機首次升空實驗。為了進一步提升飛行器的抗沖擊能力,哈佛大學的Chen等在2019年提出了一種以介電彈性體驅動為驅動方案的微型飛行器,這種微型飛行器使用介電彈性體作為驅動動力,可以達到約500 Hz的撲翼頻率,如圖19所示,功率密度為600 W/kg[36]。這種使用柔性壓電材料構建的微飛行器可以達到更高的撲翼頻率,從而產生更高的升力,此外柔性的驅動器使得飛行器面對沖擊等問題時受到的損傷更小。
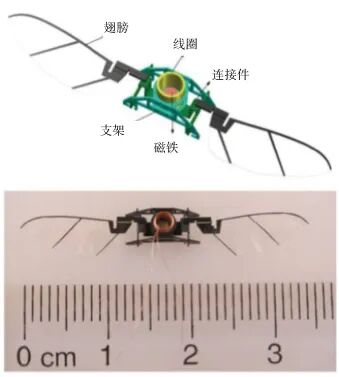
圖18 撲翼機器人原型與尺子對比[35]Fig.18 Prototype flapping-wing robot contrasted with a ruler[35]
圖19 由單個驅動器、兩個驅動器和四個驅動器驅動的撲翼微型機器人[36]Fig.19 Image of flapping-wing microrobots driven by a single actuator, two actuators, and four actuators[36]
與傳統的固定翼或旋翼飛機不同,撲翼飛行器通過往復拍打翅膀,利用不穩定的空氣動力機制產生升力。這些機制包括附著前緣渦、附加質量、尾跡捕獲、旋轉環流和拍打-合攏機制[
37-39]。
前緣渦與撲翼展向速度相關,昆蟲撲翼過程的雷諾數約為2000,在此范圍內隨著雷諾數的增加,前緣渦的展向速度隨之增大,前緣渦可以更穩定地附著在翅膀上,從而提高撲翼飛行器的升力[40]。Ellington等[41]指出,前緣渦在機翼上表面的穩定附著是軸向流或展向流出現的結果。Maxworthy、Van Den Berg等以及Birch等[
42-44]的研究也指出了前緣渦流在撲翼過程中會穩定附著在機翼上。
附加質量又稱虛擬質量[
45-46],是指機翼分別對周圍空氣進行加速和減速時受到反方向垂直于機翼表面的反作用力,它存在于撲翼沖程開始和結束時的加速和減速過程中。然而,由于它與循環力同時發生,這種附加質量力很難通過實驗和計算方法得到[45]。可使用準定常方法,給定非時變附加質量系數來估算附加質量[47]。
拍打-合攏機制是由Weis-Fogh[48]首先發現的。其發生在沖程逆轉時左右翼的相互作用中。現已證明,這種拍-合的方式可以提高許多昆蟲的升力,如黃蜂、蝗蟲、蝴蝶和小蒼蠅[
48-51]。然而,拍打-合攏機制只有在昆蟲爬升、起飛或攜帶重物時才能夠被觀測到[39]。這說明該機制雖然能夠產生較大升力,但此時撲翼幅值最大反而會增加昆蟲的能量消耗,所以只有在高升力場景需求下才會被使用[38]。
除了空氣動力學因素,撲翼飛行在加速和減速過程中也會受到翅膀慣性的影響。許多先前的研究只分析了空氣動力學,而忽略了昆蟲拍打翅膀的慣性效應[52]。由于慣性的存在 [53],昆蟲會以相對較高的迎角拍動翅膀[54],但這在空氣動力學上是低效的[55]。此外,翅膀慣性還被認為是昆蟲[56]和許多機器人撲翼[8,22]在沖程反轉時被動旋轉的原因。這些說明翅膀慣性對撲翼周期平均升力的貢獻是微不足道的,但會消耗能量。昆蟲的飛行肌肉具有彈性,可補償撲翼過程中翅膀慣性造成的能量損耗,從而適當增加撲翼頻率以提高升力[57]。這些研究說明,對撲翼升力的研究,特別是對剛性翅膀的升力研究,應該考慮機翼慣性,以便進行更精確的分析。
昆蟲飛行姿態具有被動不穩定性,依靠主動控制實現自身平衡[58]。昆蟲采用各種傳感器,如后翅退化形成的平衡棒、眼睛和觸角[
59-61]來檢測姿態偏差。一項關于果蠅的實驗研究表明,當平衡棒被解除時,它們會快速翻滾[62]。在沒有觸角鞭毛的情況下,蛾子不能保持穩定[63]。
昆蟲傳感器中的接收信號會激活身體控制機制,產生相應的控制力來平衡身體姿態。由于沒有尾巴保持平衡,昆蟲通過主動改變掃掠幅度、攻角、拍打頻率、撲翼平面角度,或者通過改變姿態來改變重心的位置[
64-65]來操縱翅膀運動。例如,Dickinson等[66]對果蠅的自由飛行進行了研究,發現果蠅通過增大或減小移動拍打角度范圍來重新定位平均氣動力中心的位置,從而改變重心和升力中心之間的相對距離來控制俯仰力矩[66];果蠅能夠操縱翅膀旋轉角度實現不同的攻角(即翅膀前緣和平均行程平面之間的角度)來控制俯仰;對于翻滾控制,果蠅同時調節兩個翅膀的拍打幅度和扭轉角度;通過不對稱地調節翅膀旋轉角度或攻角來控制偏航角。對于撲翼飛行器而言,主動控制機構會增加飛行器的質量,從而增加飛行器設計的難度。四翅或更多翅膀撲翼的穩定性分析類似于旋翼飛行器,采用翅膀的速度差實現方向控制和穩定飛行。兩翅飛行器模仿自然界中昆蟲和鳥類的穩定性原理,在設計主動控制算法之前,添加被動穩定機構的撲翼飛行器被認為是一種替代方法。RoboBee[33]、Colibri[67]和KUBeetle[21]的早期版本采用了安定面實現被動穩定性,安定面起到空氣阻尼器的作用,允許撲翼飛行器保持豎直穩定性。然而,安定面對風的擾動很敏感,降低了飛行器的機動性。為了增加微型撲翼飛行器的靈活性,需要加入主動控制算法。在NAV尺度下,哈佛大學的研究人員考慮了許多方法,如使用外部運動捕捉相機、板載傳感器、陀螺儀、磁力計[
69-71]和生物激勵觸角[61]等。在無法獲得直接角速度反饋的運動捕捉系統上,首先使用基于修正李亞普諾夫函數的類PD控制律穩定RoboBee飛行器。Fuller等提出了一種基于實驗和無模型控制策略的多輸入多輸出控制器[69],采用自適應控制方法可以提高飛行穩定性,減小制造缺陷引起的模型誤差。普渡大學采用線性二次調節方法對撲翼運動進行控制,利用線性二次型調節器(Linear Quadratic Regulator,LQR)分別跟蹤120°和150°的撲翼運動。結果表明,雖然LQR不能實現精確的相位跟蹤,但它能夠以更大的幅度和更少的功耗實現撲翼運動,這更好地滿足了MAV的設計要求[24]。上海交通大學設計了自抗擾控制器,可實現飛行器在未建模下的懸停,建立了三位速度感知系統,可感知并抑制風的擾動。試驗結果表明,飛行器無擾動懸停時控制高度均方根為2.53 cm,有擾動前飛時可控制高度飛行,其均方根誤差為2.78 cm[68]。
PAV微型撲翼飛行器通常只擁有兩個壓電雙晶片作為驅動源,為了實現微型撲翼飛行器的自由飛行控制,提出了專門的力矩控制方案。普通飛行器的飛行控制需要滿足升力、翻滾力矩、俯仰力矩以及偏航力矩四個參數的控制。對于微飛行器而言,通過控制左右兩驅動器的運動幅度可以調整飛行器的翻滾力矩;而改變翅膀的拍打同步偏移可以調整飛行器的俯仰力矩;偏航力矩的產生需要依靠上下沖程保持不同扇動速度實現控制,這種控制方法通常被稱為微飛行器的劈裂控制,將完整的正弦拍打運動轉換為兩個不同頻率的半周期翅膀拍打運動。最終微型飛行器將通過四個參數的調整,完成飛行姿態的控制任務。
MAV尺度的飛行器可以產生足夠的升力來攜帶商業上可用的電源和電子組件,使它們能夠實現自主飛行。美國航空環境公司的納米蜂鳥是第一種可以使用機載控制系統[8]進行控制飛行的無尾飛行器。定制設計的主控板包含一個單MCU,一個三軸MEMS陀螺儀,一個接收器,電源調節器和驅動器電路,質量只有0.65 g。韓國建國大學開發的KUBeetle使用非集成形式的傳感器組件,可在飛行中保持懸停,這些組件包括一個微控制器和一個ATmega328P微處理器,一個三軸MEMS陀螺儀,2.4 GHz Deltang公司生產的DT-Rx35接收器。他們使用三個旋轉舵機分別控制飛行器翻滾、俯仰和偏航。通過控制舵機擺角改變飛行器的尾緣,調節撲翼翼根使左右翅膀的攻角發生變化,從而產生控制力矩。
撲翼時,翅膀在拍打開始時加速,在拍打結束時減速。慣性力是保守力,因此在撲翼過程中不存在克服慣性力的凈能量轉移。然而,由于在高頻撲翼過程中系統缺乏能量轉換機制,系統中高速波動的力可能會增加飛行能耗[72]。昆蟲可以通過在飛行肌肉[73]、胸部和翅膀鉸鏈[74]中儲存彈性能量,并形成一個共振系統來抵消循環中較小的力,從而克服這個問題。在撲動機構中,增加彈簧以利用彈性儲能是能量轉換最簡單、最常用的方法之一。Lau等在2014年制作了電機驅動曲柄滑塊機構并在撲翼機構中加入了彈簧,建立了靜態理論模型,設置了電機的功率和升力實驗對理論進行了驗證[75]。Baek等[76]進行了電機驅動曲柄滑塊撲翼機構柔性系統的無量綱分析,分析了電機特性、曲柄滑塊的運動參數和氣動載荷對電機轉速和直流電機的輸入輸出功率的影響。Madangopal等[77]通過仿真表明,在帶有曲柄搖桿機構的設計中加入彈簧,可使電機轉矩變化減小56.32%,最大轉矩減少12%。Tantanawat等[78]通過數值研究表明,在四桿撲動機構中增加彈簧可使峰值輸入功率降低42%。
撲翼過程中存在撲翼機構和翅膀的慣性功耗以及摩擦和電機內阻引起的發熱功耗,可利用理論模型和實機測試的辦法計算各部分功耗,進而采取合適的優化方法提高撲翼動作的效率,增加飛行器飛行時間。Yang等[79]和Jeon等[80]指出,摩擦損失可以成為估計撲動機構性能的主要因素。研究還表明,摩擦損失在輸入功率中占相當大的比例,這可能與在小型拍打機構中超過慣性負荷所需的功率成正比[75,81]。Campolo等于2014年設計了雙電機直驅撲翼機構,利用電機的電阻和機械損耗、轉子的慣性負載以及氣動載荷建立了二階阻尼模型[82]。Khan等[81]推導了由曲柄驅動的四桿連桿機構的運動學方程,利用葉素法理論對機翼慣性和氣動載荷建模,研究了機翼剛度和慣量對平均撲動頻率、升力和氣動功率的影響。Park等[83]對摩擦力建模,可以預測不同運行條件下的系統損耗和功率需求。同時在機翼鉸鏈上增加彈簧,證明了彈性元件的加入可以通過減小系統的內力來減少系統的摩擦損失。
續航能力是撲翼機器人的重要性能指標。優化機翼設計性使阻力最小化,可提高撲翼效率和飛行時長[84]。可以通過優化撲翼機構、針對電機性能設計升力功率比最佳的翅膀、根據翅膀升力選擇容量質量比最佳的電池、減小摩擦損耗來實現飛行的可持續性。
很多研究機構也在提高續航能力上進行了研究。韓國建國大學通過減小飛行器質量、剪裁翅膀尺寸以減小空氣阻力,制作的KUBeetle-S的大小與自然界中的蜂鳥相似,可以在空中盤旋約8.8 min[23];德克薩斯A&M大學開發的62 g機器人蜂鳥,比納米蜂鳥重三倍多,由于電機過熱,飛行持續時間不到1 min[15];同樣由于電機過熱,Colibri只能滯空幾十秒[67]。四翅飛行器的續航性能普遍優于兩翅飛行器,有四個串聯機翼的TechJet蜻蜓可以持續飛行大約8~10min;Delfly Nimble采用X翼布局,顯示出優異的機動性[9],它可以懸停5 min,向前、向后和側向飛行,并像果蠅一樣進行傾斜轉彎、360°翻轉和快速爬升;NUS-Robotic-bird四翅飛行器使用X翼配置可以在機載視覺系統[12]的情況下待機3.5 min,并根據需要快速向任何方向飛行。代爾夫特大學八翅飛行器帶有四對撲翼。可以在室內和室外環境下進行飛行[14],具有約9 min的高飛行續航能力。
近年來,隨著驅動技術、能源技術的發展,可懸停撲翼飛行器的載荷能力、續航能力有了長足的提升,已經在實驗室條件下取得了很大進展。
本文針對可懸停撲翼飛行器的不同尺度,分別從MAV、NAV、PAV尺度下介紹了可懸停撲翼飛行器的國內外研究現狀,并對懸停撲翼飛行器升力產生原理、飛行穩定性分析、功耗效率優化和續航能力等關鍵技術進行了討論。
目前的研究表明:PAV尺度下可懸停撲翼飛行器的自由飛行仍然是一個具有挑戰性的課題。而MAV、NAV尺度下的可懸停撲翼飛行器仍然需要在飛行續航能力上有所改進,以顯示它們相對于類似尺寸的傳統旋翼飛機的優越性。目前,電機驅動的MAV尺度下的懸停撲翼飛行器在敏捷飛行能力方面取得了巨大成就,展現出廣闊的應用前景。因此,從事FWAVs研究的人員可能需要更多地關注具體的研究,如推力增強、效率、陣風/側翼響應、降噪和避開障礙物的敏捷機動性。研究增加其他運動模式,如跳躍、行走、游泳和爬行,通過完全模仿自然界昆蟲的策略可以激發撲翼飛行器的應用潛力。相信隨著可懸停FWAVs的發展,其獨特的應用價值會得到更多的體現。


























