



最常見的AGV導(dǎo)航方式有哪些?5種方法詳細(xì)說明 
二維碼導(dǎo)航二維碼導(dǎo)航的原理是AGV通過攝像頭掃描地面鋪設(shè)的二維碼,通過解析二維碼信息獲取當(dāng)前的位置信息。二維碼導(dǎo)航通常與慣性導(dǎo)航相結(jié)合,實(shí)現(xiàn)精準(zhǔn)定位。慣性導(dǎo)航是利用移動機(jī)器人內(nèi)部傳感器(光電編碼器,陀螺儀)獲取機(jī)器人的位置和姿態(tài),通常作為輔助定位。二維碼導(dǎo)航優(yōu)點(diǎn):定位精確,小巧靈活,鋪設(shè)、改變路徑也較容易,便于控制通訊,對聲光無干擾。
3541
工廠物流自動化 ??? 3年前
什么是北斗導(dǎo)航農(nóng)機(jī)自動駕駛系統(tǒng) 
北斗導(dǎo)航農(nóng)機(jī)自動駕駛系統(tǒng),通常指農(nóng)機(jī)自動駕駛2.0階段導(dǎo)航控制系統(tǒng),系統(tǒng)集成衛(wèi)星定位、慣性導(dǎo)航、機(jī)械控制、人機(jī)交互等關(guān)鍵技術(shù),以農(nóng)機(jī)為載體,對農(nóng)機(jī)轉(zhuǎn)向裝置進(jìn)行精準(zhǔn)控制,使車輛嚴(yán)格按既定路線行駛,滿足農(nóng)業(yè)場景的作業(yè)需求。給客戶提供便利,降低勞動強(qiáng)度,改善作業(yè)質(zhì)量,增加客戶收益。農(nóng)機(jī)導(dǎo)航系統(tǒng),按照控制方式,分為液壓控制自動輔助駕駛系統(tǒng)、電動方向盤控制自動輔助駕駛系統(tǒng)。
2200
千尋位置行業(yè)應(yīng)用 ??? 3年前
使用 COMSOL 對慣性傳感器進(jìn)行仿真 
配備慣性傳感器的導(dǎo)航系統(tǒng)可以通過測量線加速度和角加速度來計(jì)算車輛在三維空間中的軌跡。有了三個分別沿 x 軸、y 軸或 z 軸定向的加速度計(jì),我們就可以跟蹤三維空間中的線性運(yùn)動。同樣,用三個分別沿 x 軸、y 軸或 z 軸的定向陀螺儀,我們就可以測量三維空間中的旋轉(zhuǎn)。腦袋里的石頭?它們是你的加速度計(jì)的一部分如果你做了一件蠢事,你可能會被問“你腦袋里有石頭嗎?”
2747
我是小能 ??? 3年前
【6/8更新】如何讓導(dǎo)彈指哪兒打哪兒? 
實(shí)際上,導(dǎo)彈制導(dǎo)過程就好比生活中的手機(jī)導(dǎo)航,去一個地方,首先要知道“自己在哪兒”“目的地在哪兒”,然后需要在多種推薦路線中選擇“該怎么過去”。現(xiàn)代導(dǎo)彈是在現(xiàn)代火箭的基礎(chǔ)上發(fā)展起來的。在上世紀(jì)40年代,人們通過將簡易的慣性導(dǎo)航原理與無線電指令相結(jié)合,給火箭裝上了制導(dǎo)系統(tǒng),誕生了V-2導(dǎo)彈,但是它的命中精度是千米級,真可謂“指哪打不到哪兒”。
2317
技術(shù)鄰CAD學(xué)習(xí) ??? 3年前
無人機(jī)導(dǎo)航定位系統(tǒng)關(guān)鍵技術(shù)研究 
為了解決這個問題,人們還提出加攝像頭生成雙目SLAM,或者加IMU生成耦合視覺慣性導(dǎo)航定位系統(tǒng)。初始粒子的位置可以通過視覺測量算法測量的運(yùn)動變化來跟蹤,而不是在沒有測量的情況下隨機(jī)移動它們。使用視覺測量算法可以減少粒子集生成過程的搜索空間。
2324
無人機(jī)圈 ??? 4年前
【測繪篇】航測無人機(jī)工作原理和優(yōu)勢 
航測無人機(jī)飛行平臺系統(tǒng)構(gòu)成:飛行平臺,飛行導(dǎo)航與控制系統(tǒng),地面監(jiān)控系統(tǒng),機(jī)載遙感設(shè)備,數(shù)據(jù)傳輸系統(tǒng),發(fā)射與回收系統(tǒng),野外保障裝備,附設(shè)設(shè)備。航測無人機(jī)飛控系統(tǒng):飛控系統(tǒng)用于無人機(jī)的導(dǎo)航、定位和自主飛行控制,它由飛控板、慣性導(dǎo)航系統(tǒng)、GPS接收機(jī)、氣壓傳感器、空速傳感器等部件組成。
3737
無人機(jī)10086 ??? 3年前
汽車碰撞傳感器原理剖析 
汽車碰撞傳感器原理 碰撞傳感器的應(yīng)用非常廣泛,特別是在汽車的安全系統(tǒng)里面,而且現(xiàn)在一些機(jī)器人上也都開始搭載了碰撞傳感器,這里我們先來了解下汽車碰撞傳感器原理。
2541
木火柴 ??? 4年前
阿波羅13號宇宙飛船之?dāng)?shù)字孿生計(jì)算機(jī)系統(tǒng)解讀 
它使用了慣性導(dǎo)航系統(tǒng),加上從地面?zhèn)魉瓦^來的數(shù)據(jù),來計(jì)算艙體的位置和速度 3 發(fā)動機(jī)控制算法 登月艙需要使用發(fā)動機(jī)來進(jìn)行著陸和起飛等任務(wù)。
3606 1
UltraLAB ??? 3年前
飛行器系統(tǒng)仿真與驗(yàn)證 
圖5信號與控制庫元件模型 圖6 陀螺儀/加速度計(jì)/GPS等傳感器 以三軸陀螺穩(wěn)定平臺的慣航系統(tǒng)為例,陀螺和加速度計(jì)被直接固聯(lián)在平臺上,直接測量運(yùn)載體的角運(yùn)動和線運(yùn)動,將慣性敏感器輸出的量測信息經(jīng)誤差補(bǔ)償后直接送至導(dǎo)航計(jì)算機(jī)中進(jìn)行實(shí)時(shí)的姿態(tài)矩陣的計(jì)算,通過姿態(tài)矩陣把慣性導(dǎo)航系統(tǒng)中加速度計(jì)測量的沿運(yùn)載體坐標(biāo)系的比力信息,轉(zhuǎn)換到導(dǎo)航坐標(biāo)系中,并求解出運(yùn)載體的加速度的大小
3812 2 1
航發(fā)設(shè)計(jì) ??? 3年前
渦旋壓縮機(jī)轉(zhuǎn)軸系統(tǒng)動平衡設(shè)計(jì)與仿真驗(yàn)證 
因此,根據(jù)圖 2 所示轉(zhuǎn)軸結(jié)構(gòu)動平衡設(shè)計(jì)原理,選定 2 個平衡基面Ⅰ和Ⅱ作為配重的安裝位置,并將 F 分解至平面Ⅰ和Ⅱ內(nèi),即 FⅠ,F(xiàn)Ⅱ。顯然,為使轉(zhuǎn)軸系統(tǒng)達(dá)到動平衡狀態(tài),只需在平面Ⅰ和Ⅱ內(nèi)分別施加 1 個適當(dāng)?shù)钠胶赓|(zhì)量 m1,m2,以此產(chǎn)生 2 個相反方向的離心慣性力 F1,F(xiàn)2,最終使 2 個平面內(nèi)的的離心慣性力之和等 于零即可。
3818 2 2
我愛汽輪機(jī)仿真 ??? 2年前
千耘導(dǎo)航為什么值得信賴 
不同地況適應(yīng)性高 解鎖復(fù)雜地形環(huán)境,采用慣性導(dǎo)航器件,配合3D地形補(bǔ)償算法,適應(yīng)平地、沙地、坡地、水田等不同作業(yè)地況。 獨(dú)具電離層抑制能力 在“星地一體”加持下,具備電離層抑制能力,可有效降低電離層活躍對農(nóng)機(jī)導(dǎo)航的影響,保障精度穩(wěn)定性,不耽誤耕作農(nóng)時(shí)。 春耕季,你需要一臺千耘導(dǎo)航保駕護(hù)航,降本增效。
2068 1
千尋位置行業(yè)應(yīng)用 ??? 3年前
旋風(fēng)除塵的結(jié)構(gòu)及原理 
多級旋風(fēng)除塵器我公司最早應(yīng)用于電石爐正壓大布袋除塵器系統(tǒng),由于其具有很高的除塵效率,可減少正壓大布袋除塵器系統(tǒng)引風(fēng)機(jī)的磨損,同時(shí)也降低了布袋除塵器的負(fù)荷。旋風(fēng)慣性除塵器旋風(fēng)慣性除塵器是普通旋風(fēng)除塵器和百葉式慣性除塵器的組合,兼有慣性和旋風(fēng)除塵功能。含塵氣體從旋風(fēng)除塵器頂部螺旋線進(jìn)口切向進(jìn)入筒體,粉塵因離心力被甩向外筒內(nèi)壁,隨外螺線下降氣流落入錐斗。
2485
A氣旋塔催化燃燒除塵設(shè)備廠家. ??? 3年前
傳感器技術(shù)如何改變機(jī)器人世界 
此外,通過收購 MicroStrain,我們擴(kuò)大了機(jī)器人解決方案組合,提供慣性測量單元(IMU)和完整的慣性導(dǎo)航系統(tǒng)(GNSS/INS),以滿足定位和導(dǎo)航要求。我們?yōu)榻Y(jié)構(gòu)耐久性測試和應(yīng)力分析提供應(yīng)變片,確保產(chǎn)品的安全和性能。我們的解決方案還包括用于測量力、扭矩和稱重的應(yīng)變式傳感器,以及可無縫集成到機(jī)器人系統(tǒng)中的慣性傳感器和無線傳感器。
2961 1 1
HBK測試與測量 ??? 7月前
經(jīng)緯恒潤組合導(dǎo)航產(chǎn)品國產(chǎn)化落地,助力L2+輔助駕駛 
組合導(dǎo)航產(chǎn)品(INS)通過衛(wèi)星定位加慣性定位融合的方式提供高精度、穩(wěn)定的、全場景的定位結(jié)果。 經(jīng)緯恒潤組合導(dǎo)航產(chǎn)品應(yīng)對國產(chǎn)化的需求,已實(shí)現(xiàn)量產(chǎn)。
2288
經(jīng)緯恒潤 ??? 2年前
潛艇聲吶的分類及其應(yīng)用與發(fā)展 
有些潛艇底部安裝海底導(dǎo)航聲吶,擁有回聲定位系統(tǒng),潛艇可以直接在水下回避障礙物,并且可以對照海圖進(jìn)行導(dǎo)航,也叫水下地形匹配技術(shù)。 地形匹配導(dǎo)航的原理是利用測深儀、導(dǎo)航聲吶等水下地形探測設(shè)備,提取水下航行器下方地形特征值,把該特征值與事先存儲在計(jì)算機(jī)里已知的高分辨率的地形圖進(jìn)行匹配,從而確定位置信息。
8478 1
海工 ??? 4年前
航空航天系統(tǒng)工程-載荷和結(jié)構(gòu) 
任何飛機(jī)系統(tǒng),特別是那些有外部部件如操縱面的飛機(jī)系統(tǒng),都會受到設(shè)計(jì)系統(tǒng)必須適應(yīng)的許多外部和內(nèi)部載荷和應(yīng)力源的影響。載荷分析是一項(xiàng)巨大的任務(wù),在飛機(jī)設(shè)計(jì)過程中跨越數(shù)年。然而,系統(tǒng)設(shè)計(jì)必須從初步信息開始。顯然,系統(tǒng)工程師必須在某種程度上說負(fù)載分析師的語言,并且能夠進(jìn)行粗略的負(fù)載分析。
3661
無人機(jī)圈 ??? 3年前
仿生撲翼飛行器的控制系統(tǒng) 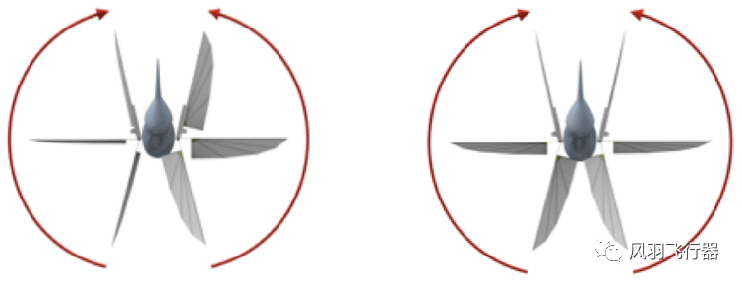
機(jī)翼在空氣動力和慣性載荷下的無限運(yùn)動受到兩個可調(diào)節(jié)止動器的限制。撲翼飛行器的攻角由機(jī)翼旋轉(zhuǎn)角的變化控制,從而影響升力和阻力參數(shù)。但存在機(jī)翼效率降低、噪聲和控制精度問題。 (2)機(jī)翼扭轉(zhuǎn)調(diào)制(主動):基于扭轉(zhuǎn)對升力和阻力參數(shù)的影響原理,通過控制俯仰實(shí)現(xiàn)。柔性翼膜是被動變形的,但扭轉(zhuǎn)分布是通過擰緊/松動膜來控制的。
5066 7 4
我愛飛機(jī) ??? 2年前
車輛性能測試03:漢航NTS.LAB車輛滑行測試系統(tǒng) 
車輛滑行測試系統(tǒng)的構(gòu)成傳感器組件: HS-Gyro90 高精度組合慣性測量單元:通過使用高精度慣性測量單元IMU與定位模塊GNSS,能夠精準(zhǔn)的獲取車輛的速度,加速度,位移,時(shí)間等多種信息,并且在衛(wèi)星信號丟失的一段時(shí)間內(nèi)仍能夠保持一定的精度。
2446
漢航 ??? 10月前
結(jié)構(gòu)動力學(xué) 劉晶波,杜修力主編下載 
平衡方程利用達(dá)朗貝爾原理將慣性力和阻尼力等效到靜力平衡方程中,有其中,ρ 為密度,μ 為阻尼系數(shù)。相對于靜力分析問題,此處主要引入了慣性項(xiàng)或阻尼項(xiàng),慣性項(xiàng)通過利用達(dá)朗貝爾原理引入,該操作使得一般的代數(shù)方程直接提升了2階,成為2階方程。因此,將帶來求解方法與靜力方法有很大的區(qū)別。2.
2490
分享菌 ??? 4年前
一期一會 | 什么是MEMS器件? 
許多MEMS傳感器屬于慣性測量單元(IMU)類別,其會將機(jī)械響應(yīng)轉(zhuǎn)換為電信號輸出。IMU可用于包括安全氣囊部署、虛擬現(xiàn)實(shí)頭戴設(shè)備、無人機(jī)導(dǎo)航和地圖系統(tǒng)的陀螺儀,以及用于視頻游戲機(jī)、攝像頭和飛機(jī)姿態(tài)控制系統(tǒng)應(yīng)用的加速計(jì)。一些常見的致動器包括數(shù)字光處理(DLP)芯片、揚(yáng)聲器、微泵、旋轉(zhuǎn)微電機(jī)、鉗子、打印機(jī)、微齒輪、微閥、微鏡和開關(guān)等。
2474
Ansys中國 ??? 4月前
20條/頁 
 14
14 跳至頁

技術(shù)鄰APP
工程師必備
工程師必備
- 項(xiàng)目客服
- 培訓(xùn)客服
- 平臺客服
TOP
