



270 基于matlab的模糊自適應(yīng)PID控制 
基于matlab的模糊自適應(yīng)PID控制,具有10頁(yè)報(bào)告。傳統(tǒng)PID在對(duì)象變化時(shí),控制器的參數(shù)難以自動(dòng)調(diào)整。將模糊控制與PID控制結(jié)合,利用模糊推理方法實(shí)現(xiàn)對(duì)PID參數(shù)的在線自整定。使控制器具有較好的自適應(yīng)性。使用MATLAB對(duì)系統(tǒng)進(jìn)行仿真,結(jié)果表明系統(tǒng)的動(dòng)態(tài)性能得到了提高。程序已調(diào)通,可直接運(yùn)行。
2236
matlab應(yīng)用與學(xué)習(xí) ??? 1年前
243 基于matlab的模糊C均值算法(FCM)及其改進(jìn)算法將空間鄰域項(xiàng)引入FCM的目標(biāo)函數(shù)(FCM_S) 
基于matlab的模糊C均值算法(FCM)及其改進(jìn)算法將空間鄰域項(xiàng)引入FCM的目標(biāo)函數(shù)(FCM_S),廣義的模糊C均值(GFCM)算法,基于核的改進(jìn)的模糊c均值聚類算法(KFCM),基于核的廣義模糊c均值聚類算法KGFCM的圖像分割方法。程序已調(diào)通,可直接運(yùn)行。
2056
matlab應(yīng)用與學(xué)習(xí) ??? 2年前
MATLAB/Simulink建模-車輛巡航控制 (1) 
因此,我們需要設(shè)計(jì)一個(gè)反饋控制器,它可以顯著加快響應(yīng)速度,而不會(huì)對(duì)其他動(dòng)態(tài)性能指標(biāo)產(chǎn)生負(fù)面影響。開環(huán)極點(diǎn)/零點(diǎn)巡航控制系統(tǒng)在 s = -b/m 處有一個(gè)單極點(diǎn),我們可以看到使用以下 MATLAB 命令繪制在 s 平面上:pzmap(P_cruise)axis([-1 1 -1 1])我們觀察到開環(huán)系統(tǒng)是穩(wěn)定的并且不會(huì)振蕩,因?yàn)闃O點(diǎn)是實(shí)數(shù)和負(fù)數(shù)。
2701 11 4
AutoEuler ??? 4年前
266 基于matlab的FCM+KFCM模糊C均值聚類分析算法 
基于matlab的FCM+KFCM模糊C均值聚類分析算法,輸入分割對(duì)象,對(duì)分割對(duì)象進(jìn)行參數(shù)設(shè)置,包括分割類別數(shù),核參數(shù)。輸出分割結(jié)果。具有GUI操作界面。程序已調(diào)通,可直接運(yùn)行。
2219 8 1
matlab應(yīng)用與學(xué)習(xí) ??? 1年前
1-107基于matlab的模糊推理系統(tǒng)(ANFIS)的時(shí)間序列預(yù)測(cè) 

基于matlab的模糊推理系統(tǒng)(ANFIS)的時(shí)間序列預(yù)測(cè),輸出訓(xùn)練集、測(cè)試集和預(yù)測(cè)數(shù)據(jù)結(jié)果,數(shù)據(jù)可更換自己的,程序已調(diào)通,可直接運(yùn)行。購(gòu)買后可下載視頻中的源程序文件。
306
matlab應(yīng)用與學(xué)習(xí) ??? 1年前
1-80基于matlab的小波包熵與模糊C均值聚類的故障診斷 
基于matlab的小波包熵與模糊C均值聚類的故障診斷,以凱斯西儲(chǔ)大學(xué)軸承數(shù)據(jù)為例進(jìn)行分析。對(duì)數(shù)據(jù)進(jìn)行小波包分解后重構(gòu),然后提取各頻帶能量分布,后計(jì)算小波包熵進(jìn)行故障診斷。輸出特征可視化結(jié)果。數(shù)據(jù)可更換自己的,程序已調(diào)通,可直接運(yùn)行。購(gòu)買后可下載視頻中的源程序文件。
262
matlab應(yīng)用與學(xué)習(xí) ??? 1年前
matlab-abaqus主動(dòng)控制?
如何利用Aabaqus聯(lián)動(dòng)matlab實(shí)現(xiàn)結(jié)構(gòu)的一個(gè)主動(dòng)控制呢?有償解決的,謝謝,可以交流一下嗎?
2227 1
LEthan ??? 2年前
有愿意給小白進(jìn)行一些MATLAB半主動(dòng)控制指導(dǎo)的嗎?
MATLAB剛?cè)腴T,想做半主動(dòng)控制,希望得到一些指導(dǎo)
2172 1
葭月三 ??? 2年前
279 基于matlab的粒子群集法對(duì)鐵路電能質(zhì)量控制系統(tǒng)的容量避行優(yōu)化設(shè)計(jì) 
基于matlab的粒子群集法對(duì)鐵路電能質(zhì)量控制系統(tǒng)的容量避行優(yōu)化設(shè)計(jì)。計(jì)算出滿足功率因素、電壓不平衡度等電能指標(biāo)的條件下。RPC所需要的補(bǔ)償功率。求得所需最小的系統(tǒng)客量。該設(shè)計(jì)能快速計(jì)算出符合系統(tǒng)設(shè)定指標(biāo)的各項(xiàng)最優(yōu)補(bǔ)償功率。并通過sumulink份真。檢驗(yàn)設(shè)計(jì)參數(shù)的準(zhǔn)確性。程序已調(diào)通,可直接運(yùn)行。
2204
matlab應(yīng)用與學(xué)習(xí) ??? 1年前
253 基于matlab的液壓位置控制源代碼 
基于matlab的液壓位置控制源代碼,有摩擦補(bǔ)償,利用滑模控制器實(shí)現(xiàn),神經(jīng)網(wǎng)絡(luò)逼近。最后實(shí)現(xiàn)位置角度和速度的控制。輸出控制誤差。程序已調(diào)通,可直接運(yùn)行。
2099
matlab應(yīng)用與學(xué)習(xí) ??? 2年前
pid自動(dòng)模糊控制的例子
比如說(shuō)有一個(gè)泵,我想控制他的轉(zhuǎn)速,在一個(gè)界面上輸入一個(gè)大小比如1000轉(zhuǎn)每分鐘,然后對(duì)應(yīng)的后臺(tái)就自動(dòng)控制泵到達(dá)了這個(gè)轉(zhuǎn)速。
2488 1
蘑菇寫手 ??? 2年前
使用MATLAB和Simulink進(jìn)行電機(jī)控制設(shè)計(jì) 
主要內(nèi)容:采用基于模型的設(shè)計(jì),通過MATLAB和Simulink獲得電機(jī)、控制設(shè)計(jì)的行業(yè)案例1.PMS M的主題2.定向控制自動(dòng)調(diào)節(jié)PI3.控制器獲得動(dòng)態(tài)去耦4.控制和磁通弱化控制
1895
MikiOne ??? 4年前
1-106基于matlab的粒子群算法與 Simulink 模型之間連接的橋梁是粒子(即PID控制器參數(shù))和該粒子對(duì)應(yīng)的適應(yīng)值(即控制系統(tǒng)的性能指標(biāo)) 
基于matlab的粒子群算法與 Simulink 模型之間連接的橋梁是粒子(即 PID 控制器參數(shù))和該粒子對(duì)應(yīng)的適應(yīng)值(即控制系統(tǒng)的性能指標(biāo))。
401
matlab應(yīng)用與學(xué)習(xí) ??? 1年前
電機(jī)仿真系列-基于模糊PID的直流電機(jī)Simulink模型 
代碼: 3、系統(tǒng)仿真與分析為分析模糊控制器控制性能.針對(duì)直流電機(jī)控制系統(tǒng).利用模糊控制技術(shù)設(shè)計(jì)轉(zhuǎn)速調(diào)節(jié)器.電流調(diào)節(jié)器依然采用傳統(tǒng)PI控制.用Matlab/Simulink仿真工具進(jìn)行了系統(tǒng)仿真。并和傳統(tǒng)內(nèi)外環(huán)均采用PID控制的系統(tǒng)指標(biāo)進(jìn)行了比較。從仿真結(jié)果可以看出。模糊PID控制系統(tǒng)具有超調(diào)量小、魯棒性和抗負(fù)載擾動(dòng)能力強(qiáng)的優(yōu)點(diǎn)。
3070 6 3
汽車從業(yè)人員 ??? 4年前
基于AMESim的PEMFC冷卻系統(tǒng)建模與控制研究 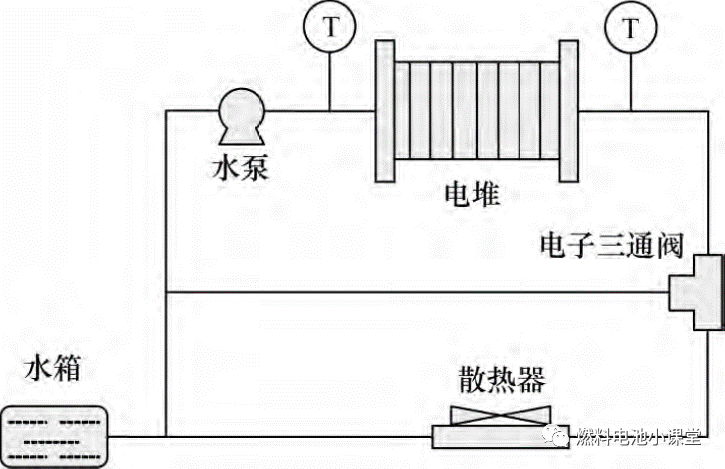
聯(lián)合仿真的環(huán)境為MATLAB2021a和AMESim2021.1,使用GNUGCC64位編譯器。本文以電堆入口冷卻液的溫度為控制目標(biāo),需將其溫度控制在68℃附近。
4005
技術(shù)哥 ??? 3年前
1-18基于matlab的二階動(dòng)態(tài)系統(tǒng)的滑膜控制 
基于matlab的二階動(dòng)態(tài)系統(tǒng)的滑膜控制,程序已調(diào)通,可直接運(yùn)行。購(gòu)買后可下載視頻中的源程序文件。
228
matlab應(yīng)用與學(xué)習(xí) ??? 1年前
18基于matlab的二階動(dòng)態(tài)系統(tǒng)的滑膜控制,程序已調(diào)通,可直接運(yùn)行。 
基于matlab的二階動(dòng)態(tài)系統(tǒng)的滑膜控制,程序已調(diào)通,可直接運(yùn)行。標(biāo)價(jià)為程序價(jià)格,不包含售后。程序保證可直接運(yùn)行。
1657
matlab應(yīng)用與學(xué)習(xí) ??? 2年前
168基于matlab的六自由度并聯(lián)搖擺臺(tái)的反解控制算法 
基于matlab的六自由度并聯(lián)搖擺臺(tái)的反解控制算法,stewart平臺(tái),配有GUI界面,可以自定義角度,桿長(zhǎng)等參數(shù)。設(shè)定動(dòng)平臺(tái)位姿即能得到電機(jī)參數(shù)。程序已調(diào)通,可直接運(yùn)行。
1950
matlab應(yīng)用與學(xué)習(xí) ??? 2年前
18基于matlab的二階動(dòng)態(tài)系統(tǒng)的滑膜控制,程序已調(diào)通,可直接運(yùn)行。標(biāo)價(jià)為程序價(jià)格,不包含售后。 
基于matlab的二階動(dòng)態(tài)系統(tǒng)的滑膜控制,程序已調(diào)通,可直接運(yùn)行。標(biāo)價(jià)為程序價(jià)格,不包含售后。程序保證可直接運(yùn)行。
1860
explicit ??? 2年前
adams_car_matlab_整車模型_平順性路面_聯(lián)合仿真_半主動(dòng)控制力 
本課程與一般論文里的半懸架聯(lián)合仿真不同,以B級(jí)路面勻速工況為例, 詳細(xì)教授了整車模型在勻速直線運(yùn)動(dòng)時(shí)的減振器半主動(dòng)控制力與matlab simulink的聯(lián)合仿真。并解決了直接使用仿真結(jié)果.m文件時(shí) simulink里面output項(xiàng)包括testrig下默認(rèn)參數(shù)的30余項(xiàng)output接口,我們只需要保留使用懸架動(dòng)撓度,車身垂向加速度,車身垂向速度,懸架兩端相對(duì)速度接口。
2186 11
東邪不邪 ??? 4年前
20條/頁(yè) 
 24
24 跳至頁(yè)

技術(shù)鄰APP
工程師必備
工程師必備
- 項(xiàng)目客服
- 培訓(xùn)客服
- 平臺(tái)客服
TOP
