



recurdyn履帶車(chē)輛動(dòng)力學(xué)分析 
recurdyn履帶車(chē)輛動(dòng)力學(xué)分析
1730
Recurdyn 13060190875 ??? 4年前
Recurdyn履帶車(chē)輛動(dòng)力學(xué)仿真 

Recurdyn履帶車(chē)輛動(dòng)力學(xué)仿真
1338 1
Recurdyn 13060190875 ??? 4年前
《基于 RecurDyn 的四履帶足機(jī)器人運(yùn)動(dòng)學(xué)仿真》現(xiàn)已開(kāi)放領(lǐng)取 
摘要: 應(yīng)用多體動(dòng)力學(xué)仿真分析軟件 RecurDyn 對(duì)四履帶足機(jī)器人進(jìn)行全三維建模及越障過(guò)程仿真,并分析了履帶機(jī)器人行走過(guò) 程 中 的 力 學(xué) 模 型,仿真 結(jié) 果 動(dòng) 態(tài),準(zhǔn)確的反映了四履帶足機(jī)器人行走機(jī)構(gòu)的越障過(guò)程,驗(yàn)證了四履帶足機(jī)器人行走機(jī)構(gòu)較之雙履帶結(jié)構(gòu)形式出色的越障能力,體現(xiàn) 了 RecurDyn 軟件在履帶機(jī)器人的動(dòng)力學(xué)仿真分析方面的有效性和優(yōu)越性 。1. 引言2.
2550
上海安世亞太 ??? 2年前
一文了解多體動(dòng)力學(xué)仿真分析方法和應(yīng)用領(lǐng)域 
傳動(dòng)鏈條動(dòng)力學(xué)分析 履帶車(chē)輛動(dòng)力學(xué)分析 皮帶系統(tǒng)動(dòng)力學(xué)分析3、車(chē)輛系統(tǒng)的動(dòng)力學(xué)分析車(chē)輛系統(tǒng)動(dòng)力學(xué)分析,專(zhuān)用模板和子系統(tǒng)建模工具,可用于為預(yù)定義分析場(chǎng)景構(gòu)建底盤(pán)、懸掛、方向盤(pán)和車(chē)輪。對(duì)稱(chēng)建模功能和基于模板的工作流程,讓用戶(hù)可以輕松地分析運(yùn)動(dòng)學(xué)與合規(guī)(K&C)場(chǎng)景及行駛與操縱(R&H)場(chǎng)景。
3815
Ansys中國(guó) ??? 4年前
ADAMS履帶小車(chē)仿真 
經(jīng)過(guò)計(jì)算,履帶及鏈輪的組合如下圖所示: 2.履帶動(dòng)力學(xué)模型的建立 ①首先根據(jù)設(shè)計(jì)尺寸在3維建模軟件中將鏈輪及履帶節(jié)畫(huà)出,具體如下所示: 在軟件中按履帶幾何關(guān)系裝配好后
3369 2
擺渡人張 ??? 2年前
Recurdyn履帶問(wèn)題 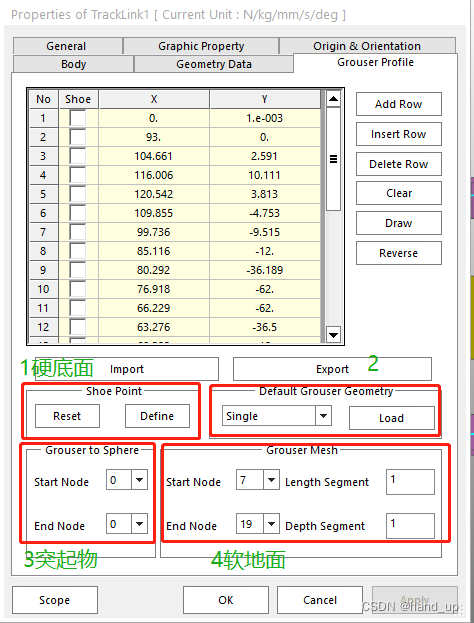
3.問(wèn)題:履帶齒與地面參數(shù)設(shè)置 有兩種類(lèi)型的車(chē)輛-土壤相互作用。
4227 3
CAE仿真學(xué)習(xí)菌 ??? 2年前
案例 | Adams-EDEM聯(lián)合仿真預(yù)測(cè)軟土上軍事車(chē)輛的機(jī)動(dòng)性 
輪式和履帶式車(chē)輛的多體動(dòng)力學(xué)(MBD)模型已經(jīng)得到驗(yàn)證,并用于預(yù)測(cè)車(chē)輛在硬質(zhì)路面上的各種工況性能。然而,在可變形的地形上進(jìn)行車(chē)輛仿真時(shí),目前的方法還無(wú)法完全表示車(chē)輛與軟土的動(dòng)態(tài)相互作用。設(shè)計(jì)車(chē)輛時(shí),工程師通常會(huì)利用其過(guò)去的物理測(cè)試經(jīng)驗(yàn)來(lái)預(yù)測(cè)車(chē)輛離開(kāi)硬質(zhì)路面后的性能。 只有當(dāng)車(chē)輛做出來(lái)并測(cè)試之后,才能獲得有關(guān)車(chē)輛在軟土上的性能的實(shí)際數(shù)據(jù)。
3035 1 1
Cruise ??? 3年前
recurdyn履帶車(chē)輛動(dòng)力學(xué)分析

1736
Recurdyn 13060190875 ??? 4年前
recurdyn履帶車(chē)輛動(dòng)力學(xué)分析

1722
Recurdyn 13060190875 ??? 4年前
RecurDyn成功案例:小型履帶式裝載機(jī)通過(guò)仿真分析來(lái)控制成本 
? 考慮前后托輪,支重輪和履帶之間的復(fù)雜接觸? 在斜坡上行駛時(shí),需要考慮防止履帶發(fā)生脫離現(xiàn)象▎解決方案? 使用履帶工具包快速構(gòu)建履帶式裝載機(jī)的動(dòng)力學(xué)模型? 針對(duì)各種地面條件進(jìn)行行駛仿真? 隨時(shí)檢查作用在前后惰輪上的荷載? 基于仿真結(jié)果更改滾輪的位置和車(chē)輛重心的位置? 確定應(yīng)力集中區(qū)域并考慮適當(dāng)補(bǔ)強(qiáng)?
2401 2 2
杭州擬創(chuàng)(RecurDyn原廠) ??? 2年前
RecrDyn履帶專(zhuān)用Track工具包 
RecurDyn履帶專(zhuān)用Track工具包適用人群:履帶機(jī)構(gòu)研究及從業(yè)人員,廣大動(dòng)力學(xué)仿真用戶(hù)、RecurDyn興趣愛(ài)好者RecurDyn履帶專(zhuān)用Track工具包,打破傳統(tǒng)建模方式,引領(lǐng)仿真新潮流(免費(fèi))【已結(jié)束】 直播時(shí)間:2022-08-03 19:30課程背景:近年來(lái)隨著來(lái)履帶車(chē)輛的發(fā)展,人們對(duì)其機(jī)動(dòng)性能的要求也越來(lái)越高,研究人員也越來(lái)越關(guān)注車(chē)輛的參數(shù)
4784 1 1
杭州擬創(chuàng)(RecurDyn原廠) ??? 3年前
新一代強(qiáng)大的柔性多體動(dòng)力學(xué)仿真解決方案——ANSYS Motion 
在機(jī)械系統(tǒng)的運(yùn)動(dòng)學(xué)分析、車(chē)輛動(dòng)力學(xué)、大變形結(jié)構(gòu)分析、高速大旋轉(zhuǎn)系統(tǒng)、3D接觸系統(tǒng)、以及多體運(yùn)動(dòng)、結(jié)構(gòu)變形、動(dòng)力學(xué)耐久性分析等應(yīng)用場(chǎng)景下,ANSYS Motion 都能夠提供卓越的解決方案。
3960 1
Ansys中國(guó) ??? 6年前
從裝載機(jī)到電動(dòng)車(chē),多學(xué)科求解器平臺(tái)如何拓展仿真邊界 
常見(jiàn)分析功能包括: 剛度/強(qiáng)度/疲勞/耐久性分析; 高速運(yùn)動(dòng)下的操控性與穩(wěn)定性; 自動(dòng)駕駛、緊急剎車(chē)(AEB)等控制系統(tǒng)仿真; 子系統(tǒng)(如懸架、轉(zhuǎn)向)開(kāi)發(fā); 特殊車(chē)型(如三輪車(chē)、電瓶車(chē)、履帶車(chē))分析。這些功能不僅支持剛度、強(qiáng)度、疲勞、操控性、舒適性等全流程驗(yàn)證,對(duì)于軟土、履帶系統(tǒng)等特殊路況,也能輕松實(shí)現(xiàn)仿真分析。
3795
技術(shù)鄰公告 ??? 10月前
2024年RecurDyn優(yōu)秀案例競(jìng)賽作品分享:核探測(cè)機(jī)器人底盤(pán)設(shè)計(jì)與越障性能仿真驗(yàn)證 
四、結(jié)論 通過(guò)對(duì)機(jī)器人虛擬樣機(jī)模型的建立并施加相應(yīng)的約束、接觸與驅(qū)動(dòng),對(duì)機(jī)器人進(jìn)行了動(dòng)力學(xué)仿真分析,仿真分析結(jié)果驗(yàn)證了機(jī)器人整體結(jié)構(gòu)設(shè)計(jì)的合理性以及底盤(pán)運(yùn)動(dòng)的穩(wěn)定性,并對(duì)仿真結(jié)果與理論分析結(jié)果之間存在偏差的數(shù)據(jù)進(jìn)行了詳細(xì)分析,通過(guò)對(duì)本章的動(dòng)力學(xué)仿真分析進(jìn)一步保證了機(jī)器人在工作中的穩(wěn)定性,為實(shí)驗(yàn)樣機(jī)的研制奠定了理論基礎(chǔ)。作者:胡俊濤
2554
杭州擬創(chuàng)(RecurDyn原廠) ??? 1年前
最新版本64位Adams_ATV2015安裝和測(cè)試 
? ? ? 一: MSC ADAMS/ATV Toolkit是MSCADAMS用于履帶式車(chē)輛動(dòng)力學(xué)性能仿真的專(zhuān)用工具,是分析軍用或商用履帶式車(chē)輛各種走行動(dòng)力學(xué)性能 的理想工具;通過(guò)ATVToolkit,利用其提供的車(chē)身、履帶、主動(dòng)輪、負(fù)重輪、拖帶輪及誘導(dǎo)輪模板,可快速建立履帶式車(chē)輛的子系統(tǒng)到總 裝配模型。ATVToolkit中提供了多種懸掛模式和履帶的模板,方便用戶(hù)建立各種復(fù)雜的車(chē)輛模型。
55 9
Crisby_Vectory_TrHo ??? 6年前
【8月19-21日 杭州】杭州擬創(chuàng)科技RecurDyn軟件培訓(xùn)班 
一、培訓(xùn)背景:履帶式行走裝置由于其具有接地面積大、附著性能好、爬坡能力強(qiáng)、轉(zhuǎn)彎半徑小等特點(diǎn),因此它的應(yīng)用范圍十分廣泛,而履帶車(chē)輛的穩(wěn)定性、履帶板的可靠性等研究是企業(yè)研發(fā)過(guò)程中必不可的重要環(huán)節(jié),傳統(tǒng)的仿真分析軟件不僅建模耗時(shí)耗力,仿真時(shí)長(zhǎng)往往也不盡人意。 RecurDyn軟件中搭載了履帶專(zhuān)用的工具,包能幫助用戶(hù)快速進(jìn)行履帶建模與仿真分析。
2695 1
技術(shù)鄰公告 ??? 3年前
Matlab精細(xì)建模之車(chē)輛縱向動(dòng)力學(xué)(上) 
分析可以發(fā)現(xiàn):低車(chē)速時(shí)車(chē)輛反向加速是因?yàn)槟P?.1的滾阻一直為負(fù)值,實(shí)際滾阻應(yīng)該與車(chē)輛運(yùn)動(dòng)方向相反;隨著車(chē)速增大加速度越來(lái)越大是因?yàn)轱L(fēng)阻也一直為負(fù)值,實(shí)際風(fēng)阻應(yīng)該與車(chē)輛運(yùn)動(dòng)方向相反。
2986 8 2
李小林-汽車(chē) ??? 4年前
行業(yè)分享丨從裝載機(jī)到電動(dòng)車(chē),多學(xué)科求解器平臺(tái)如何拓展仿真邊界
常見(jiàn)分析功能包括: 剛度/強(qiáng)度/疲勞/耐久性分析; 高速運(yùn)動(dòng)下的操控性與穩(wěn)定性; 自動(dòng)駕駛、緊急剎車(chē)(AEB)等控制系統(tǒng)仿真; 子系統(tǒng)(如懸架、轉(zhuǎn)向)開(kāi)發(fā); 特殊車(chē)型(如三輪車(chē)、電瓶車(chē)、履帶車(chē))分析。這些功能不僅支持剛度、強(qiáng)度、疲勞、操控性、舒適性等全流程驗(yàn)證,對(duì)于軟土、履帶系統(tǒng)等特殊路況,也能輕松實(shí)現(xiàn)仿真分析。
2797
ALTAIR ??? 10月前
2023年6月培訓(xùn)報(bào)名 
理論講解與實(shí)操相結(jié)合,邊教邊練,互動(dòng)式溝通,確保學(xué)員真正學(xué)有所獲。 培訓(xùn)合格后,將統(tǒng)一頒發(fā)RecurDyn官方培訓(xùn)證書(shū)。
2258
杭州擬創(chuàng)(RecurDyn原廠) ??? 3年前
3D車(chē)輛動(dòng)力學(xué)模型 
24.1 車(chē)輛動(dòng)力學(xué)模型 三維車(chē)輛動(dòng)力學(xué)模型有10個(gè)自由度。 彈簧質(zhì)量(支撐在懸架上面的質(zhì)量)有6個(gè)自由度。三個(gè)位移(x、y和z)和三個(gè)旋轉(zhuǎn)(側(cè)傾、俯仰和橫擺)。非彈簧質(zhì)量(懸架下方的質(zhì)量:4個(gè)車(chē)輪)有4個(gè)自由度,即4個(gè)z位移。在彈簧質(zhì)量和非彈簧質(zhì)量之間放置了懸掛系統(tǒng)。 Z運(yùn)動(dòng)下圖為作用在車(chē)輛上的z力。后方和前方的地面對(duì)輪胎的接觸力。
2901 8 5
飛馳人生5 ??? 4年前
20條/頁(yè) 
 14
14 跳至頁(yè)

技術(shù)鄰APP
工程師必備
工程師必備
- 項(xiàng)目客服
- 培訓(xùn)客服
- 平臺(tái)客服
TOP
