



[lammps教程]OVITO繪制原子運(yùn)動(dòng)軌跡線 ![[lammps教程]OVITO繪制原子運(yùn)動(dòng)軌跡線](https://img.jishulink.com/upload/202309/cf636c7999ca4c77b8f731d6caa1f488.jpg?image_process=resize,fw_294,fh_172,)
一區(qū)Script Materialia期刊:多主元素合金中的短程有序域擴(kuò)散一文,研究了CrCoNi合金和MoNbTa合金中原子的擴(kuò)散過程,文中有出現(xiàn)如下圖所示的原子運(yùn)動(dòng)軌跡線。這種原子運(yùn)動(dòng)軌跡線我們?cè)谘芯繑U(kuò)散過程中常常會(huì)用到。圖參考自:Bin Xing, Xinyi Wang, William J.
4050 1
320科技工作室 ??? 2年前
comsol固體顆粒在絕緣油中的運(yùn)動(dòng),怎么呈現(xiàn)往復(fù)運(yùn)動(dòng)軌跡?
直流電壓下顆粒(纖維)在絕緣油中的運(yùn)動(dòng)軌跡,電荷量怎么設(shè)置才能讓他在兩個(gè)電極往復(fù)運(yùn)動(dòng),如圖,我自己設(shè)置正值就直接吸附在負(fù)極上了,怎么讓粒子碰到電極時(shí)極性反轉(zhuǎn)呢
2258
用戶_97854 ??? 12月前
六軸機(jī)械臂(帶抓手)運(yùn)動(dòng)學(xué)分析+軌跡規(guī)劃 
驗(yàn)證了正運(yùn)動(dòng)學(xué)方程的正確性。
5211 1
余俊煒 ??? 2年前
【案例分享】南通中遠(yuǎn)海運(yùn)川崎船舶運(yùn)動(dòng)軌跡智能分析及預(yù)測(cè) 
一、方案概述 船舶的運(yùn)動(dòng)軌跡預(yù)測(cè)是一個(gè)十分綜合的問題,主機(jī)負(fù)荷影響船舶的航速,風(fēng)浪等外界環(huán)境影響船舶的航向,水流影響舵角以及船艏向,船舶姿態(tài)影響主機(jī)負(fù)荷。傳統(tǒng)方案是通過理論方法簡歷船舶的運(yùn)動(dòng)方程從而對(duì)船舶的運(yùn)動(dòng)軌跡進(jìn)行計(jì)算,該方案具有良好的穩(wěn)定性,但難以表征模型與環(huán)境之間的耦合作用,在實(shí)海域場(chǎng)景下計(jì)算復(fù)雜。
2339
天洑軟件 ??? 1年前
ls-prepost節(jié)點(diǎn)運(yùn)動(dòng)軌跡怎么查看?
ls-prepost節(jié)點(diǎn)運(yùn)動(dòng)軌跡怎么查看?
2221 1
果寶_?? ??? 2年前
【有趣的abaqus后處理】巧用annotation之運(yùn)動(dòng)軌跡及動(dòng)態(tài)注釋 
;當(dāng)然如果想在不同的分析步顯示不同點(diǎn),或同一個(gè)分析步顯示多個(gè)點(diǎn)的運(yùn)動(dòng)軌跡,只需<strong>多次運(yùn)行腳本</strong>即可。
3760 10 5
靜默本無緣 ??? 5年前
基于fluent 6dof動(dòng)網(wǎng)格的紙飛機(jī)運(yùn)動(dòng)軌跡仿真 

本視頻基于fluent的動(dòng)網(wǎng)格的6dof模塊,模擬紙飛機(jī)的運(yùn)動(dòng)軌跡;包含UDF編寫,動(dòng)網(wǎng)格具體參數(shù)設(shè)置等所有計(jì)算設(shè)置!幫助大家更好的掌握fluent六自由度進(jìn)行被動(dòng)運(yùn)動(dòng)的模擬仿真!和小球落水,飛機(jī)投彈類似,但是更有趣味些!歡迎大家互相交流學(xué)習(xí),同時(shí)提出寶貴指導(dǎo)和建議!注:源文件包含ICEM劃分的網(wǎng)格文件,Mesh/CAS文件和仿真結(jié)果文件,UDF文件等,請(qǐng)一起下載!
2546 1 6
湍流實(shí)驗(yàn)室 ??? 8年前
請(qǐng)問怎么在marc mentat中將測(cè)得的運(yùn)動(dòng)-時(shí)間軌跡定義為剛體的運(yùn)動(dòng)?
1、我現(xiàn)在是在接觸體中定義剛體,然后控制類型選擇位置,但是不理解參數(shù)的設(shè)置欄的意思;旋轉(zhuǎn)軸和旋轉(zhuǎn)中心的X Y Z數(shù)值都代表什么?2、控制類型旋轉(zhuǎn)荷載的話會(huì)有一個(gè)附加節(jié)點(diǎn)作為控制節(jié)點(diǎn),將力施加在控制節(jié)點(diǎn)上,請(qǐng)問控制類型選位置時(shí)有控制節(jié)點(diǎn)這個(gè)概念嗎?如果有我該怎么設(shè)置呢
2052 1
核酸檢測(cè)陰性(綠碼) ??? 3年前
基于ADAMS的點(diǎn)按手法運(yùn)動(dòng)仿真 
只要給定了D-H參數(shù),就可以計(jì)算得出機(jī)器人手臂末端在給定坐標(biāo)系下的運(yùn)動(dòng)軌跡。給定一組關(guān)節(jié)角θi向量,就對(duì)應(yīng)末端軌跡上的一點(diǎn)。當(dāng)然這是相對(duì)于非冗余自由度機(jī)器人手臂。反之,當(dāng)給定了機(jī)器人手臂的末端軌跡,反解出關(guān)節(jié)角θi。機(jī)器人手臂的正、逆運(yùn)動(dòng)學(xué)計(jì)算是比較復(fù)雜的,可以借助MATLAB進(jìn)行計(jì)算。
3010 2
擺渡人張 ??? 2年前
六軸碼垛機(jī)器人admas正逆運(yùn)動(dòng)學(xué)仿真 
,并且該運(yùn)動(dòng)軌跡與前面添加一般點(diǎn)驅(qū)動(dòng)后的運(yùn)動(dòng)學(xué)逆解的末端運(yùn)動(dòng)軌跡即圖5-15所示軌跡基本一樣,采用ADAMS從已知的位姿變換再反求機(jī)器人關(guān)節(jié)角度的正確性得到了驗(yàn)證。
2373
余俊煒 ??? 3年前
基于精準(zhǔn)碰撞檢測(cè)算法的機(jī)械臂避障軌跡規(guī)劃 
根據(jù)實(shí)際安全生產(chǎn)與穩(wěn)定的要求,首先,工業(yè)機(jī)器人避障軌跡規(guī)劃需滿足全局避障,不僅僅是滿足末端執(zhí)行器的避障,而是做到各個(gè)連桿的避障 [1];其次機(jī)械臂關(guān)節(jié)空間軌跡規(guī)劃的各個(gè)關(guān)節(jié)的角速度與角加速度必須連續(xù),以提高機(jī)械臂的運(yùn)動(dòng)效率和降低關(guān)節(jié)沖擊 [2];最后,為得到更加安全節(jié)能的軌跡,在進(jìn)行避障軌跡規(guī)劃的同時(shí)需要優(yōu)化各關(guān)節(jié)運(yùn)動(dòng)角度以及各連桿運(yùn)動(dòng)軌跡長度。
3493 6 3
機(jī)械設(shè)計(jì)師 ??? 4年前
基于機(jī)械系統(tǒng)動(dòng)力學(xué)自動(dòng)分析的多噴頭3D打印機(jī)運(yùn)動(dòng)學(xué)研究 
在ADAMS中設(shè)置運(yùn)動(dòng)副的驅(qū)動(dòng)函數(shù),運(yùn)動(dòng)軌跡如圖5所示。2個(gè)噴頭在同一運(yùn)動(dòng)軌跡上后,行星電機(jī)繞工作臺(tái)勻速運(yùn)動(dòng),設(shè)置好打印件的層高等參數(shù),縱向電機(jī)就會(huì)旋轉(zhuǎn)1個(gè)步距角,逐層向上完成打印工作。圖5 協(xié)同打印 3 結(jié)束語本文所設(shè)計(jì)的3D打印機(jī),基于柱坐標(biāo)系設(shè)計(jì)。主要采取外嚙合行星齒輪的方法,使2個(gè)柱座在工作臺(tái)上實(shí)現(xiàn)打印工作。
4501 4
擺渡人張 ??? 2年前
OCAD應(yīng)用:凸輪曲線的優(yōu)化設(shè)計(jì) 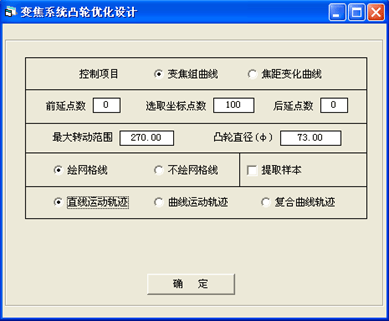
所謂“曲線運(yùn)動(dòng)軌跡”或“復(fù)合曲線軌跡”其區(qū)別在“曲線運(yùn)動(dòng)軌跡”是對(duì)變焦組的運(yùn)動(dòng)曲線全過程均為一個(gè)完整的三次方程式,而 “復(fù)合曲線軌跡”則是把變焦組運(yùn)動(dòng)軌跡的前半段保持直線運(yùn)動(dòng),只是在指定位置之后才改成曲線運(yùn)動(dòng),這樣可以重點(diǎn)改善變焦后半段的曲線運(yùn)動(dòng)速率,因?yàn)檠a(bǔ)償組的運(yùn)動(dòng)速率只在后半段才變化激烈。在選擇“曲線運(yùn)動(dòng)軌跡”后,界面下方會(huì)給出運(yùn)動(dòng)曲線方程系數(shù)的表格,可以直接填寫。
1862
信光嗎 ??? 3月前
OCAD應(yīng)用:凸輪曲線的優(yōu)化設(shè)計(jì) 
所謂“曲線運(yùn)動(dòng)軌跡”或“復(fù)合曲線軌跡”其區(qū)別在“曲線運(yùn)動(dòng)軌跡”是對(duì)變焦組的運(yùn)動(dòng)曲線全過程均為一個(gè)完整的三次方程式,而 “復(fù)合曲線軌跡”則是把變焦組運(yùn)動(dòng)軌跡的前半段保持直線運(yùn)動(dòng),只是在指定位置之后才改成曲線運(yùn)動(dòng),這樣可以重點(diǎn)改善變焦后半段的曲線運(yùn)動(dòng)速率,因?yàn)檠a(bǔ)償組的運(yùn)動(dòng)速率只在后半段才變化激烈。
1182
追光ing ??? 3月前
某型號(hào)接觸器--開關(guān)的觸頭電弧運(yùn)動(dòng)仿真分析 
隨著時(shí)間的推移,電弧在電磁力和氣流的作用下逐漸被拉長、變細(xì),并向滅弧室方向運(yùn)動(dòng)。在運(yùn)動(dòng)過程中,電弧會(huì)發(fā)生彎曲、扭曲等變形,呈現(xiàn)出復(fù)雜的形態(tài)。通過對(duì)不同時(shí)刻電弧形態(tài)變化的分析,可以直觀地了解電弧的運(yùn)動(dòng)軌跡和發(fā)展過程。 磁場(chǎng)方向的改變也會(huì)對(duì)電弧運(yùn)動(dòng)產(chǎn)生顯著影響。
2769 4
大龍貓?? ??? 12月前
渦旋壓縮機(jī)的虛擬建模與運(yùn)動(dòng)仿真
文獻(xiàn)[6]指出,動(dòng)渦旋盤的絕對(duì)運(yùn)動(dòng)就是十字滑環(huán)相對(duì)于支架體的牽連運(yùn)動(dòng)和動(dòng)渦盤相對(duì)于十字滑環(huán)的相對(duì)運(yùn)動(dòng)的合成,其中心 b 的運(yùn)動(dòng)軌跡是以支架體中心 a 為圓心,以 r 為半徑的圓在 ADAMS 軟件中,依次取動(dòng)渦旋盤和曲軸上任意一點(diǎn),即可得到動(dòng)渦旋盤的運(yùn)動(dòng)軌跡。如圖 12 所示,動(dòng)渦旋盤運(yùn)動(dòng)軌跡是以曲軸偏心距 r為半徑的圓。從而驗(yàn)證了動(dòng)渦旋盤公轉(zhuǎn)平動(dòng)的規(guī)律。為動(dòng)渦盤運(yùn)動(dòng)規(guī)律。
2661
我愛汽輪機(jī)仿真 ??? 2年前
大型混流式水輪機(jī)轉(zhuǎn)輪用鑄鋼件夾雜缺陷預(yù)測(cè)與工藝優(yōu)化 
2.5 夾雜粒子運(yùn)動(dòng)軌跡模擬與缺陷預(yù)測(cè)圖7是下環(huán)鑄鋼件中兩個(gè)相同放入位置粒子的運(yùn)動(dòng)軌跡,其隨時(shí)間變化表現(xiàn)出不同的形態(tài)。
4277 1
雙螺桿泵 ??? 2年前
機(jī)械臂B樣條插補(bǔ)軌跡規(guī)劃 
axes=gca;axes.CameraViewAngleMode='manual';axes.CameraViewAngle=7.5;gf=gcf;gf.Position=[400,300,720,420];saveas(gf,'B樣條末端運(yùn)動(dòng)軌跡','svg')figure('Color',[1,1,1],'Position',[485,180,536,325]);
2121
余俊煒 ??? 3年前
基于Adams的六足直立式步行機(jī)器人運(yùn)動(dòng)仿真分析 
3 后步行腿機(jī)構(gòu)運(yùn)動(dòng)學(xué)方程建立與仿真分析3.1 建立后步行腿機(jī)構(gòu)的數(shù)學(xué)模型如前所述,前、后步行腿機(jī)構(gòu)(步行腿1 與步行腿3)的運(yùn)動(dòng)軌跡相同,現(xiàn)只取后步行腿機(jī)構(gòu)分析。
4178 7 8
仿真客 ??? 3年前
OCAD應(yīng)用:凸輪曲線的優(yōu)化設(shè)計(jì) 
所謂“曲線運(yùn)動(dòng)軌跡”或“復(fù)合曲線軌跡”其區(qū)別在“曲線運(yùn)動(dòng)軌跡”是對(duì)變焦組的運(yùn)動(dòng)曲線全過程均為一個(gè)完整的三次方程式,而 “復(fù)合曲線軌跡”則是把變焦組運(yùn)動(dòng)軌跡的前半段保持直線運(yùn)動(dòng),只是在指定位置之后才改成曲線運(yùn)動(dòng),這樣可以重點(diǎn)改善變焦后半段的曲線運(yùn)動(dòng)速率,因?yàn)檠a(bǔ)償組的運(yùn)動(dòng)速率只在后半段才變化激烈。在選擇“曲線運(yùn)動(dòng)軌跡”后,界面下方會(huì)給出運(yùn)動(dòng)曲線方程系數(shù)的表格,可以直接填寫。
1986
追光ing ??? 12月前
20條/頁 
 21
21 跳至頁

技術(shù)鄰APP
工程師必備
工程師必備
- 項(xiàng)目客服
- 培訓(xùn)客服
- 平臺(tái)客服
TOP
