



Hypermesh中旋轉(zhuǎn)陣列命令-視頻展示 

將本人帖子中的一個(gè)內(nèi)容(關(guān)于網(wǎng)格旋轉(zhuǎn)陣列的命令)進(jìn)行簡(jiǎn)單的視頻操作展示。目前,hypermesh2017之前的版本還沒(méi)有旋轉(zhuǎn)陣列命令,只有旋轉(zhuǎn)的命令,后者不能一次性完成如齒輪網(wǎng)格特征的旋轉(zhuǎn)陣列操作。
2990 1 1
力學(xué)星空 ??? 6年前
adams/view如何建立一個(gè)皮帶下帶動(dòng)40個(gè)皮帶輪旋轉(zhuǎn)?
求Adams/view2016大神,如何建立一個(gè)皮帶下帶動(dòng)40個(gè)皮帶輪旋轉(zhuǎn),外加兩個(gè)導(dǎo)向輪?
1989 1 1
老沖_4343 ??? 3年前
UG NX草圖 - 陣列曲線的使用 
根據(jù)圖紙可得三個(gè)φ5圓都在φ24圓周上,僅是在位置上有120°的旋轉(zhuǎn)角度,對(duì)于這種類(lèi)型的特征可以用陣列曲線進(jìn)行復(fù)制。
3636
張偉一 ??? 3年前
ADAMS行星齒輪機(jī)構(gòu)運(yùn)動(dòng)學(xué)及動(dòng)力學(xué)仿真 
由圖可以看出接觸力呈周期性變化,變化頻率為旋轉(zhuǎn)頻率的整數(shù)倍。 圖7行星輪和內(nèi)齒輪Y方向接觸力 在ADAMS中對(duì)接觸力做傅里葉變換,得到頻域內(nèi)的接觸力變化曲線,由圖可以看出接觸力的最大值出現(xiàn)在與旋轉(zhuǎn)頻率相同。
4603 8 1
劉曉東 ??? 2年前
ADAMS怎么導(dǎo)入力矩?cái)?shù)據(jù)驅(qū)動(dòng)轉(zhuǎn)動(dòng)副旋轉(zhuǎn)?
我有一組力矩?cái)?shù)據(jù),怎么導(dǎo)入ADAMS里控制轉(zhuǎn)動(dòng)副運(yùn)動(dòng)?
2185 1 1
越關(guān)山 ??? 3年前
仿真案例|使用多體動(dòng)力學(xué)軟件仿真柔性可卷太陽(yáng)能電池陣列的展開(kāi)過(guò)程 
圖5:展開(kāi)期間和結(jié)束時(shí)狹縫管中的應(yīng)力展開(kāi)期間芯軸位置的時(shí)間歷程圖以及位于芯軸中心的旋轉(zhuǎn)彈簧施加的扭矩時(shí)間歷程,如圖6所示。彈簧充當(dāng)旋轉(zhuǎn)阻尼器,阻尼隨芯軸的旋轉(zhuǎn)速度線性變化。
2166
上海安世亞太 ??? 4年前
Hypermesh的陣列復(fù)制功能及用戶(hù)交互界面二次開(kāi)發(fā) 
在Hypermesh中對(duì)于許多重復(fù)結(jié)構(gòu)的單元普遍處理方法是對(duì)一原始結(jié)構(gòu)單元進(jìn)行多次復(fù)制移動(dòng)、旋轉(zhuǎn)以達(dá)到每個(gè)結(jié)構(gòu)的網(wǎng)格形狀、質(zhì)量的一致性,能夠減少重復(fù)結(jié)構(gòu)件的多次網(wǎng)格劃分,但Hypermesh中沒(méi)有的陣列的處理操作,對(duì)于許多重復(fù)結(jié)構(gòu)的網(wǎng)格就需要逐個(gè)點(diǎn)擊復(fù)制移動(dòng),可以說(shuō)是件十分麻煩且枯燥的過(guò)程。
3566 3 1
SimYoungC ??? 1年前
如何批量的修改CAD的陣列對(duì)象? 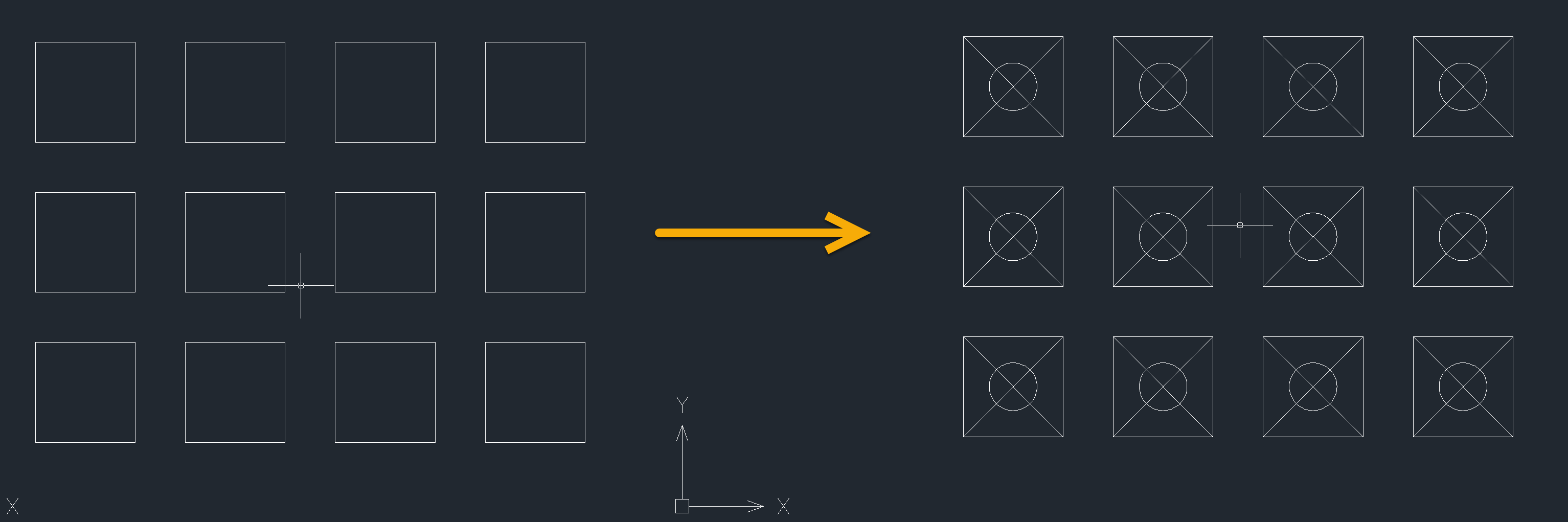
在三維CAD軟件中,批量修改陣列對(duì)象的功能極大地提高了設(shè)計(jì)效率和準(zhǔn)確性。它允許用戶(hù)一次性對(duì)多個(gè)陣列中的相同對(duì)象進(jìn)行統(tǒng)一修改,而無(wú)需逐個(gè)編輯。這一功能特別適用于需要重復(fù)使用相同元素的大型項(xiàng)目,如建筑布局、電路板設(shè)計(jì)等。通過(guò)批量修改,設(shè)計(jì)師能夠快速調(diào)整尺寸、旋轉(zhuǎn)角度或修改屬性,確保所有陣列對(duì)象的一致性和協(xié)調(diào)性。
2315
自學(xué)土木網(wǎng) ??? 8月前
軸承基礎(chǔ)結(jié)構(gòu)介紹及Adams建模仿真 
前言:軸承是支撐軸及軸上的零件,保持軸的旋轉(zhuǎn)精度,減少轉(zhuǎn)動(dòng)軸與支撐之間的摩擦和磨損,并承受載荷。用于確定旋轉(zhuǎn)軸與其它零部件相對(duì)運(yùn)動(dòng)位置,起支撐或?qū)蜃饔玫牧悴考J褂?em>Adams建模可以幫助用戶(hù)簡(jiǎn)化模型,并與其它機(jī)構(gòu)進(jìn)行連接,分析機(jī)械結(jié)構(gòu)各項(xiàng)運(yùn)動(dòng)指標(biāo),輔助機(jī)械設(shè)計(jì)。
2504
技術(shù)鄰直播 ??? 1年前
案例分享 | 基于Adams的側(cè)風(fēng)穩(wěn)定性極端工況仿真 
由于空氣動(dòng)力學(xué)對(duì)車(chē)輛自身的平移和轉(zhuǎn)動(dòng)影響較小,CFD模型沒(méi)有考慮由于側(cè)風(fēng)引起的車(chē)輛姿態(tài)的任何變化,例如繞其軸的旋轉(zhuǎn)和偏離標(biāo)稱(chēng)航向的偏差。 這種方法可以減輕模型復(fù)雜性和計(jì)算資源。 多體動(dòng)力學(xué)模型是在Adams Chassis中構(gòu)建的。Adams Chassis為汽車(chē)制造商及其供應(yīng)商提供了專(zhuān)門(mén)的建模環(huán)境,以快速建立全車(chē)和車(chē)輛子系統(tǒng)的模型。
2108 1
MSC Cradle CFD ??? 3年前
軸承基礎(chǔ)知識(shí)介紹及Adams建模仿真分析講解(含詳細(xì)視頻教程) 
軸承的定義軸承是支撐軸及軸上的零件,保持軸的旋轉(zhuǎn)精度,減少轉(zhuǎn)動(dòng)軸與支撐之間的摩擦和磨損,并承受載荷。用于確定旋轉(zhuǎn)軸與其它零部件相對(duì)運(yùn)動(dòng)位置,起支撐或?qū)蜃饔玫牧悴考?em>Adams建模仿真的優(yōu)勢(shì):使用Adams建模可以幫助用戶(hù)簡(jiǎn)化模型,其開(kāi)放式的平臺(tái)支持自定義開(kāi)發(fā)程序和插件,可以與其他工程軟件連接并進(jìn)行數(shù)據(jù)交換和耦合分析?,分析機(jī)械結(jié)構(gòu)各項(xiàng)運(yùn)動(dòng)指標(biāo),輔助機(jī)械設(shè)計(jì)。
3640 3
技術(shù)鄰公告 ??? 1年前
Adams與Matlab聯(lián)合仿真示例 
添加旋轉(zhuǎn)副,構(gòu)建方式如圖所示為旋轉(zhuǎn)副添加結(jié)果。 添加力矩到旋轉(zhuǎn)副上,構(gòu)建方式如圖所示,力矩大小選擇為0。 添加狀態(tài)變量,命名為torque,如圖所示,同樣的方法添加angle和angular_velocity變量。
3579 3 2
仿真客 ??? 3年前
Adams管路機(jī)器人仿真 
③驅(qū)動(dòng)輪的建立 和上文采用同樣復(fù)制旋轉(zhuǎn)的方法在支腿邊緣共建立六個(gè)驅(qū)動(dòng)輪: ④約束副的建立 如下所示,驅(qū)動(dòng)輪與支腿之間建立旋轉(zhuǎn)副,支腿與主體建立旋轉(zhuǎn)副,兩個(gè)伸縮支撐分別與支腿、主體建立球副,伸縮支撐之間建立移動(dòng)副。
4330 1
擺渡人張 ??? 2年前
從0到1學(xué)習(xí)Adams軸承建模方法 
6、在Shaft中選擇太陽(yáng)輪,在Housing中選擇太陽(yáng)輪軸 7、可以設(shè)定軸承的驅(qū)動(dòng),需要在Impose Motion中設(shè)定驅(qū)動(dòng),選擇繞z軸旋轉(zhuǎn),并給定旋轉(zhuǎn)驅(qū)動(dòng)函數(shù)step(time,0,0,1,2.09)。 8、最后點(diǎn)擊完成,等待模型的生成即可9、點(diǎn)擊模型仿真,觀察模型運(yùn)動(dòng)狀態(tài)。
5006 35 11
郝大妞 ??? 1年前
Maxwell 仿真--海爾貝克陣列磁懸浮受力結(jié)果 
通常情況下,永磁體產(chǎn)生的磁場(chǎng)是圍繞磁體分布的,而海爾貝克陣列能夠改變這種磁場(chǎng)分布的常規(guī)狀態(tài)。 以簡(jiǎn)單的線性海爾貝克陣列為例,它是由多個(gè)永磁體按照一定的方向和順序排列而成。相鄰磁體的磁化方向會(huì)按照特定的規(guī)律變化,比如,磁體的磁化方向可以逐步旋轉(zhuǎn)一定的角度,使得磁場(chǎng)在期望的方向上疊加增強(qiáng)。 當(dāng)磁體按照海爾貝克陣列排列時(shí),由于相鄰磁體的磁場(chǎng)相互作用。
2919 1
大龍貓?? ??? 1年前
Maxwell 仿真--神奇的海爾貝克陣列 
通常情況下,永磁體產(chǎn)生的磁場(chǎng)是圍繞磁體分布的,而海爾貝克陣列能夠改變這種磁場(chǎng)分布的常規(guī)狀態(tài)。 以簡(jiǎn)單的線性海爾貝克陣列為例,它是由多個(gè)永磁體按照一定的方向和順序排列而成。相鄰磁體的磁化方向會(huì)按照特定的規(guī)律變化,比如,磁體的磁化方向可以逐步旋轉(zhuǎn)一定的角度,使得磁場(chǎng)在期望的方向上疊加增強(qiáng)。
4118
大龍貓?? ??? 1年前
abaqus學(xué)習(xí)總結(jié)(作業(yè))
導(dǎo)入部件實(shí)例后可以對(duì)其進(jìn)行線性陣列(Linear Pattern)、放射狀陣列(Radial Pattern)、移動(dòng)實(shí)例、旋轉(zhuǎn)實(shí)例等,除了移動(dòng)和旋轉(zhuǎn)方法外,裝配模塊還提供了定位各個(gè)部件實(shí)例的工具集,通過(guò)選擇實(shí)例的面或邊來(lái)定位。可以選擇部件實(shí)例的面或邊移動(dòng),成為移動(dòng)部件實(shí)例,也可以選擇面或邊固定,成為固定部件實(shí)例。常見(jiàn)的定位標(biāo)準(zhǔn)包括:平行面、面對(duì)面、平行邊、邊對(duì)邊、共軸、點(diǎn)重合、坐標(biāo)系平行、接觸。
4605 17 10
請(qǐng)給維克多一點(diǎn)關(guān)愛(ài) ??? 4年前
和機(jī)械式旋轉(zhuǎn)激光雷達(dá)相比,MEMS固態(tài)激光雷達(dá)有哪些優(yōu)勢(shì)和劣勢(shì)? 
懂軍事的小伙伴應(yīng)該了解,現(xiàn)在的相控陣?yán)走_(dá)已經(jīng)不需要旋轉(zhuǎn)就可向任何方向發(fā)射無(wú)線電波。圖片上的一個(gè)小圓點(diǎn)就是一個(gè)陣列,利用獨(dú)立天線同步形成的微陣列,只需控制每個(gè)天線發(fā)送信號(hào)間的時(shí)機(jī)或陣列,不需“旋轉(zhuǎn)”,就可以向任何方向發(fā)送無(wú)線電波。類(lèi)似的把無(wú)線電波替換為激光就得到了相控陣激光雷達(dá)。
3405
駕駛哥 ??? 4年前
案例 | Adams-Marc聯(lián)合仿真幫助三星獲得設(shè)計(jì)見(jiàn)解 
洗衣機(jī)設(shè)計(jì)的改進(jìn)包括容量和旋轉(zhuǎn)速度的提高。然而,在行業(yè)內(nèi),機(jī)器重量和成本降低,與這些設(shè)計(jì)指標(biāo)相沖突。 洗衣機(jī)減振也是一項(xiàng)挑戰(zhàn)。在旋轉(zhuǎn)循環(huán)中,機(jī)器會(huì)產(chǎn)生明顯的不平衡離心力,從而導(dǎo)致振動(dòng)和搖晃。消除這類(lèi)振動(dòng)對(duì)于靜音洗衣機(jī)的設(shè)計(jì)和最佳用戶(hù)體驗(yàn)的獲得是至關(guān)重要的。 現(xiàn)代洗衣機(jī)是一個(gè)包含滾筒的復(fù)雜的多體系統(tǒng),滾筒通過(guò)一端或兩端的軸承懸吊。
2379
Cruise ??? 3年前
基于Adams的六足直立式步行機(jī)器人運(yùn)動(dòng)仿真分析 
進(jìn)入Adams-View[10]模塊環(huán)境中,通過(guò)工具箱中的建模工具面板選擇連桿工具圖標(biāo),根據(jù)中間步行腿機(jī)構(gòu)各連桿桿件質(zhì)量特性、尺寸和初始位置,創(chuàng)建中間步行腿機(jī)構(gòu)幾何模型,如表1所示。然后,創(chuàng)建各連桿之間的旋轉(zhuǎn)運(yùn)動(dòng)副,其中,O 點(diǎn)、D 點(diǎn)是固定旋轉(zhuǎn)運(yùn)動(dòng)副,lFG 是連桿lEF 的延伸部分,兩桿繞著F 點(diǎn)隨曲柄lOF 同時(shí)旋轉(zhuǎn)運(yùn)動(dòng)。
4178 7 8
仿真客 ??? 3年前
20條/頁(yè) 
 12
12 跳至頁(yè)

技術(shù)鄰APP
工程師必備
工程師必備
- 項(xiàng)目客服
- 培訓(xùn)客服
- 平臺(tái)客服
TOP
