



千耘導(dǎo)航QY310|常見故障及解決方案 
在作業(yè)季節(jié)來臨前,為了讓用戶更好的使用千耘農(nóng)機(jī)導(dǎo)航,我們挑選出幾個(gè)千耘導(dǎo)航QY310常見問題,幫助用戶朋友們應(yīng)對,更好的保障春耕作業(yè)。 1. 基站與網(wǎng)絡(luò) 1. 顯屏衛(wèi)星顆數(shù)為0. 解決辦法: 1 未連接GNSS天線或天線接觸不良。重新連接GNSS天線及天線饋線(或?qū)Q主副天線)。 2 車輛在室內(nèi)或天線受到嚴(yán)重遮擋。將車輛行駛到開闊地帶。
2341
千尋位置行業(yè)應(yīng)用 ??? 3年前
飛行器系統(tǒng)仿真與驗(yàn)證 
圖7 導(dǎo)航計(jì)算在測量裝置和控制算法建模時(shí),可以施加必要的擾動(dòng)和噪聲模型,并考慮初始對準(zhǔn)和初始姿態(tài)的影響。由于各類靜、動(dòng)態(tài)誤差和噪聲的存在,在慣性導(dǎo)航計(jì)算中,一般通過姿態(tài)算法和濾波算法來減小誤差的影響,提高控制精度。
3811 2 1
航發(fā)設(shè)計(jì) ??? 3年前
阿波羅13號宇宙飛船之?dāng)?shù)字孿生計(jì)算機(jī)系統(tǒng)解讀 
阿波羅13號的指令艙和登月艙都配備了計(jì)算機(jī)系統(tǒng),用于控制飛船的飛行、導(dǎo)航、姿態(tài)控制和通訊等。計(jì)算機(jī):阿波羅13號使用的計(jì)算機(jī)是當(dāng)時(shí)最先進(jìn)的計(jì)算機(jī)之一,稱為“阿波羅指令艙計(jì)算機(jī)”(Apollo Guidance Computer,簡稱AGC)。AGC使用硬件和軟件相結(jié)合的方式,實(shí)現(xiàn)了飛船的導(dǎo)航、姿態(tài)控制、發(fā)動(dòng)機(jī)控制等功能。
3606 1
UltraLAB ??? 3年前
最常見的AGV導(dǎo)航方式有哪些?5種方法詳細(xì)說明 
二維碼導(dǎo)航二維碼導(dǎo)航的原理是AGV通過攝像頭掃描地面鋪設(shè)的二維碼,通過解析二維碼信息獲取當(dāng)前的位置信息。二維碼導(dǎo)航通常與慣性導(dǎo)航相結(jié)合,實(shí)現(xiàn)精準(zhǔn)定位。慣性導(dǎo)航是利用移動(dòng)機(jī)器人內(nèi)部傳感器(光電編碼器,陀螺儀)獲取機(jī)器人的位置和姿態(tài),通常作為輔助定位。二維碼導(dǎo)航優(yōu)點(diǎn):定位精確,小巧靈活,鋪設(shè)、改變路徑也較容易,便于控制通訊,對聲光無干擾。
3541
工廠物流自動(dòng)化 ??? 3年前
千耘導(dǎo)航QY210Pro|常見故障及解決方案 
剛開機(jī)無法自動(dòng)駕駛解決辦法:屬于正常現(xiàn)象,系統(tǒng)需要一次起步或者倒車,以便獲取車輛的方向和姿態(tài)。4. 自動(dòng)駕駛時(shí)停車時(shí)間過長提示重啟控制器解決辦法:屬于正常現(xiàn)象,車輛長時(shí)間靜止陀螺停止工作,需要重啟控制器后獲取車輛方向和姿態(tài)信息。掃描下方二維碼或點(diǎn)此查看更多北斗產(chǎn)業(yè)相關(guān)資訊、產(chǎn)品及解決方案。
2150
千尋位置行業(yè)應(yīng)用 ??? 3年前
經(jīng)緯恒潤組合導(dǎo)航產(chǎn)品國產(chǎn)化落地,助力L2+輔助駕駛 
組合導(dǎo)航產(chǎn)品 產(chǎn)品特色功能: · 通過區(qū)域參考網(wǎng)增強(qiáng)精密單點(diǎn)定位(PPP-RTK)/NRTK+MEMS IMU實(shí)現(xiàn)厘米級高精度定位 · 輸出車身姿態(tài),包括經(jīng)緯度、海拔、速度、航向等信息 · 可實(shí)現(xiàn)航跡推算,精度0.2%(無GNSS信號或信號強(qiáng)度不夠時(shí)) · OTA遠(yuǎn)程程序更新 · 體積僅為
2288
經(jīng)緯恒潤 ??? 2年前
一種變軸螺旋槳水空跨域無人航行器設(shè)計(jì)和控制技術(shù) 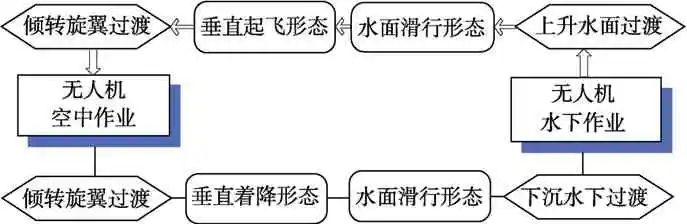
如圖14所示, 導(dǎo)航的傳統(tǒng)視線法(Conventional Line-of-Sight,CLOS)具有簡潔的算法流程和易于在硬件上實(shí)現(xiàn)等優(yōu)點(diǎn),被廣泛應(yīng)用于無人機(jī)等移動(dòng)物體的直線導(dǎo)航任務(wù)中。該算法將平面運(yùn)動(dòng)物體的位置誤差轉(zhuǎn)換為期望的姿態(tài)角,通過調(diào)整姿態(tài)角讓物體沿著期望的直線運(yùn)動(dòng)。直接運(yùn)用CLOS 方法來做可傾轉(zhuǎn)螺旋槳無人機(jī)的過渡狀態(tài)的高度控制導(dǎo)航,通過控制升降舵保持俯仰角恒定不變來實(shí)現(xiàn)期望高度值。
6358 1 2
aero-engine ??? 2年前
4大技術(shù)亮點(diǎn)支撐應(yīng)用優(yōu)勢 全新一代旗艦型行業(yè)無人機(jī)千巡翼X4發(fā)布 
系統(tǒng)標(biāo)配差分模塊,支持RTK、PPK作業(yè)模式,全面支持北斗三號衛(wèi)星導(dǎo)航系統(tǒng),同時(shí)還兼容GPS、Galileo 、GLONASS 衛(wèi)星導(dǎo)航系統(tǒng)。為了應(yīng)對如沙漠、海洋等無人區(qū)的情況,千巡翼X4具備星基增強(qiáng)的能力,在星基模式下,它無需依賴運(yùn)營商網(wǎng)絡(luò),即可獲取國家2000(CGCS2000)坐標(biāo)系下的厘米級高精度POS(位置與姿態(tài)數(shù)據(jù)),助力大家在特殊條件下作業(yè)也能從容不迫。
2137
千尋位置行業(yè)應(yīng)用 ??? 3年前
馬斯克的星際飛船設(shè)計(jì)神器—高速計(jì)算設(shè)備硬件配置推薦 
Systems Tool Kit (STK):用于進(jìn)行空間環(huán)境仿真和導(dǎo)航系統(tǒng)仿真,可用于星際飛行器的軌道模擬和導(dǎo)航分析 3 強(qiáng)度分析工具軟件 ANSYS Mechanical:用于進(jìn)行有限元分析(FEA),可以模擬星際飛船結(jié)構(gòu)的應(yīng)力、變形、振動(dòng)等特性。
2516 1
UltraLAB ??? 2年前
重復(fù)使用航天運(yùn)載器的發(fā)展及其關(guān)鍵技術(shù) 
此時(shí),箭體質(zhì)心和壓心變化較大,著陸支腿展開存在動(dòng)態(tài)過程,且展開不同步對姿態(tài)有沖擊。以增強(qiáng)適應(yīng)性為目標(biāo)的辨識與自抗擾控制方法是主要的研究方向。高精度導(dǎo)航重復(fù)使用航天運(yùn)載器的返回過程對導(dǎo)航精度要求很高。隨著火箭距離著陸場越來越近,大氣環(huán)境更為復(fù)雜,慣性/衛(wèi)星組合導(dǎo)航方法已無法滿足任務(wù)需求。
2979
看航空 ??? 3年前
【6/8更新】如何讓導(dǎo)彈指哪兒打哪兒? 
知道了“我”在哪兒、目標(biāo)在哪兒之后,控制系統(tǒng)控制彈翼和發(fā)動(dòng)機(jī),指揮導(dǎo)彈改變飛行姿態(tài),按照要求的方向、路線和速度飛向目標(biāo),完成最后一擊。實(shí)際上,導(dǎo)彈制導(dǎo)過程就好比生活中的手機(jī)導(dǎo)航,去一個(gè)地方,首先要知道“自己在哪兒”“目的地在哪兒”,然后需要在多種推薦路線中選擇“該怎么過去”。現(xiàn)代導(dǎo)彈是在現(xiàn)代火箭的基礎(chǔ)上發(fā)展起來的。
2317
技術(shù)鄰CAD學(xué)習(xí) ??? 3年前
仿生撲翼飛行器的控制系統(tǒng) 
撲翼控制方法 撲翼飛行器的自主飛行離不開姿態(tài)控制及位置控制。 與傳統(tǒng)的固定翼和旋轉(zhuǎn)翼飛機(jī)不同,撲翼飛行器姿態(tài)的控制主要依靠撲翼運(yùn)動(dòng)方式的改變,并配合尾翼的輔助調(diào)節(jié)。
5065 7 4
我愛飛機(jī) ??? 2年前
【測繪篇】航測無人機(jī)工作原理和優(yōu)勢 
航測無人機(jī)飛行平臺系統(tǒng)構(gòu)成:飛行平臺,飛行導(dǎo)航與控制系統(tǒng),地面監(jiān)控系統(tǒng),機(jī)載遙感設(shè)備,數(shù)據(jù)傳輸系統(tǒng),發(fā)射與回收系統(tǒng),野外保障裝備,附設(shè)設(shè)備。航測無人機(jī)飛控系統(tǒng):飛控系統(tǒng)用于無人機(jī)的導(dǎo)航、定位和自主飛行控制,它由飛控板、慣性導(dǎo)航系統(tǒng)、GPS接收機(jī)、氣壓傳感器、空速傳感器等部件組成。
3737
無人機(jī)10086 ??? 3年前
自動(dòng)駕駛技術(shù):改變交通出行的未來 
北斗衛(wèi)星是中國自主研發(fā)的導(dǎo)航系統(tǒng),具有定位精度高、覆蓋范圍廣、可靠性強(qiáng)等特點(diǎn),在全球范圍內(nèi)提供全天候、全天時(shí)、高精度的定位、導(dǎo)航和授時(shí)服務(wù),有助于自動(dòng)駕駛的發(fā)展。 千尋位置依托北斗的高精度定位能力,創(chuàng)建汽車高精度定位產(chǎn)品的“五維”體系,從精準(zhǔn)性、可靠性、安全性、效率、質(zhì)量等五個(gè)方面樹立產(chǎn)品標(biāo)準(zhǔn),并形成“高可靠、低成本、可信賴”的服務(wù)優(yōu)勢。
2148
千尋位置行業(yè)應(yīng)用 ??? 2年前
噩夢難度開局?千巡翼X4挑戰(zhàn)大高差助力數(shù)字中國 
由于載荷支持增穩(wěn)云臺,無人機(jī)平臺即便有再大的擾動(dòng),也絲毫不會(huì)影響相機(jī)平穩(wěn)的對地拍攝姿態(tài)。在六項(xiàng)融合避障和傾斜相機(jī)實(shí)時(shí)圖傳的加持下,山區(qū)超視距作業(yè)再也不是技術(shù)人員的“心病”。
2070
千尋位置行業(yè)應(yīng)用 ??? 3年前
為智能眼鏡穿上“隱形鎧甲”:沃華慧通可靠性測試解決方案 
專業(yè)的全自動(dòng)微跌測試系統(tǒng)(如WH-2108-5A)能夠模擬從0.5米(口袋滑落)到2米(工業(yè)場景)的不同高度,覆蓋正面、側(cè)面乃至鏡腿朝下的特殊姿態(tài) 。更重要的是,針對智能眼鏡重心不均的特點(diǎn),高精度測試設(shè)備支持六面四角跌落,且能實(shí)現(xiàn)24小時(shí)無人值守連續(xù)作業(yè) 。經(jīng)結(jié)構(gòu)優(yōu)化后的產(chǎn)品,在一次1.2米跌落完好率可達(dá)91.7%——這背后,正是測試設(shè)備提供的精準(zhǔn)數(shù)據(jù)在指導(dǎo)設(shè)計(jì)優(yōu)化 。
966
德基西瓜 ??? 2月前
世界無人艇技術(shù)研發(fā)動(dòng)態(tài)與作戰(zhàn)使用分析 
一、無人艇技術(shù)研發(fā)動(dòng)態(tài)在無人艇技術(shù)的研發(fā)鏈條中,世界各國除了在傳統(tǒng)的導(dǎo)航智能化、姿態(tài)控制與遠(yuǎn)程通信方面發(fā)力以外,隨著無人艇技術(shù)的服役使用,各國發(fā)現(xiàn),一些看起來“非核心、非主流”的因素卻在實(shí)際上影響或制約著無人艇實(shí)際使用的效果,而這些技術(shù)逐漸成為近年來的研究熱點(diǎn)。
2293
海工 ??? 3年前
MicroStrain傳感器 - 幫助推動(dòng)仿人機(jī)器人性能的發(fā)展 
IMU 與機(jī)器人的控制系統(tǒng)建立直接通信,這些信息具有多種功能,如穩(wěn)定機(jī)器人、微調(diào)其方向和實(shí)現(xiàn)精確導(dǎo)航。選擇 MicroStrain 的三個(gè)主要原因 準(zhǔn)確性和精確性:提供精確的機(jī)器人方位測量,這對需要進(jìn)行以下操作的任務(wù)至關(guān)重要 ——精確定位或導(dǎo)航 緊湊型設(shè)計(jì):重量輕,設(shè)計(jì)緊湊,易于集成到 Westwood Robotics 的各種產(chǎn)品中。
2688
HBK測試與測量 ??? 11月前
國外先進(jìn)軌道轉(zhuǎn)移飛行器典型項(xiàng)目 
軌道轉(zhuǎn)移飛行器主要功能根據(jù)上述任務(wù)性質(zhì)可知,軌道機(jī)動(dòng)能力、自主導(dǎo)航、制導(dǎo)與飛行控制能力是軌道轉(zhuǎn)移飛行器的核心能力,如何進(jìn)行空間推進(jìn)系統(tǒng)與推進(jìn)技術(shù)的研發(fā)、采用何種方式進(jìn)行高精準(zhǔn)自主制導(dǎo),成為各國主要的研究方向。
3008
我愛飛機(jī) ??? 3年前
反無人機(jī)技術(shù)再突破?無線電協(xié)議破解可以“接管”無人機(jī)嗎? 
筆者分析認(rèn)為,EA系統(tǒng)通過破解通信協(xié)議“接管”無人機(jī)的可能性不大,其技術(shù)路線是采用無人機(jī)干擾壓制技術(shù),切斷無人機(jī)與地面站之間的通信,使無人機(jī)進(jìn)入自動(dòng)導(dǎo)航模式,然后通過GPS誘騙技術(shù),重新設(shè)定無人機(jī)航線的GPS坐標(biāo)”,將其誘騙至指定區(qū)域著陸。虛假指令與真正指令畢竟存在一定偏差,并未達(dá)到真正“接管”,只是利用GPS導(dǎo)航系統(tǒng)上存在的漏洞,對其進(jìn)行欺騙。
2787
無人機(jī)10086 ??? 4年前
20條/頁 
跳至頁

技術(shù)鄰APP
工程師必備
工程師必備
- 項(xiàng)目客服
- 培訓(xùn)客服
- 平臺客服
TOP
