



VirtualLab Fusion如何使用可編程函數及示例(柱面透鏡) 
它也可以被認為是在單個平面中起作用的理想化組件:工作流程需要在x,y平面上定義一個位置相關的復值函數,然后將該函數乘到入射場上。 我們以理想的柱面透鏡為例來詳細介紹整個過程。 可編程函數所在位置:目錄 可編程函數所在位置:光學設置編寫代碼?右側面板顯示可用的獨立參數列表。
2270
追光ing ??? 1年前
大神們,怎么求解二維層流模型wall邊界上某個點的受流體力的情況,x,y方向的?
請問各位大神,想要求二維純層流流動模型中wall邊界上某幾個點的受力(X,Y方向),該如何求解?fluent和CFD Post中均提醒,力只能在面上計算,這種應該如何得出來,十分感謝
2092 1
用戶_30914 ??? 2年前
Ansys Zemax|如何設計無焦系統 
在示例文件中打開cylindrical_lens.zmx: 上圖展示了一個柱面透鏡,其前表面為圓柱面,后表面為平面。我們希望光線通過這個柱面透鏡在像面上得到一條聚焦的線,也就是說在Y方向有最小的空間展寬,而在X方向上有最小的角度展寬。要達到這個目的也很簡單。
852
宇熠科技 ??? 29天前
SYNOPSYS 光學設計軟件課程四十六:一個激光二極管光束整形器 
旋轉顯示器,你會看到 X 軸上的光束比 Y 軸上的光束要大得多。 糾正這個問題,需要在表面3上添加一個柱面透鏡。在 WS 中,選擇該表面,單擊曲率對話框按鈕,然后選擇復曲面或柱面按鈕,并給出 Y-Z 半徑10毫米和 X-Z 半徑0。單擊 OK 按3鈕并關閉對話框。
2165
墨光科技 ??? 2年前
VirtualLab Fusion鏡頭設計及衍射分析案例—柱透鏡仿真 
像散是激光束的一種固有光學特性,表現為光束在 X、Y 兩個正交方向上的聚焦點不重合,而模式像散轉換器通過精密設計的光學結構(如特殊柱面鏡組、相位調制元件、光纖光柵等),可定量調控激光的像散量與像散方向:既能校正激光自身的像散缺陷,也能主動引入可控像散,讓激光束從 “非對稱形態” 轉化為 “對稱形態”,或從單一模式切換為目標模式。
1414
信光嗎 ??? 2月前
Ansys Zemax | 如何設計漸進透鏡 
它們以屈光度為單位: 球面光焦度 柱面光焦度 最大和最小光焦度 垂直和水平光焦度 X或Y方向光焦度此外,該功能還可以以透鏡單位顯示有效焦距 ( EFL )。這些圖表為我們理解自由曲面如何影響光焦度變化提供巨大幫助。另外,POWF操作數可以直接優化任何點上用視場光焦圖計算出的任何項。該功能在已知某表面上的視場光焦圖時非常有用。
1396
宇熠科技 ??? 4月前
Lumerical | 超透鏡設計:Lumerical 與 Zemax 的互通性第一部分 
在這個案例中,我們正在設計一個超透鏡,使其結合一個僅在Y 方向具有光焦度的柱面鏡可以將入射準直光束進行最佳地聚焦。對于沒有元原子的柱面透鏡而言,主要將沿X軸產生線焦點,我們的目標是通過優化超透鏡的相位掩模來實現最小的RMS光斑半徑。
3462 2 1
宇熠科技 ??? 3年前
ZEMAX軟件技術應用專題:如何在OpticStudio中建模菲涅爾透鏡 
(Radial Height)這是透鏡的最大徑向孔徑(如果徑向對稱),或者為y半高(如果柱面對稱)。
2512
w**elab86_Swsp ??? 3年前
基于zemax的激光合束過程分析 
與球面透鏡一樣,柱面鏡的凸面應朝向準直射光束,以盡可能減少。d_1=2f_1 (tan?( θ_2∕2))d_2=2f_2 (tan?( θ_1∕2)) 由于激光二極管輸出光束發散較快,我們需要仔細確認每個圓柱上的光斑尺寸不超過鏡頭的有效光孔徑。
2755
320科技工作室 ??? 2年前
Ansys Zemax | 如何設計漸進透鏡 
它們以屈光度為單位: 球面光焦度 柱面光焦度 最大和最小光焦度 垂直和水平光焦度 X或Y方向光焦度此外,該功能還可以以透鏡單位顯示有效焦距 ( EFL )。這些圖表為我們理解自由曲面如何影響光焦度變化提供巨大幫助。另外,POWF操作數可以直接優化任何點上用視場光焦圖計算出的任何項。該功能在已知某表面上的視場光焦圖時非常有用。
2515 1
宇熠科技 ??? 1年前
comsol怎么顯示單獨y方向上的應力分布
大佬們有人知道怎么顯示軸向的應力分布嗎,comsol上結構力學表達式太多,不知道選哪一個
1287
用戶_137218 ??? 6月前
Jcmsuite應用:脊形波導模式分析 
因此,將二維截面處理為圓形沿著y軸進行一個掃掠。另外y軸由AxisPositionX替換,即柱面軸的x方向位于AxisPositionX。當省略參數AxisPositionX時,AxisPositionX >Infinity情況收斂于未彎曲/筆直情況,這是積極地。計算出的1e-6曲率半徑的有效折射率為3.0189192705+0.0000001039i。
2297
追光ing ??? 1年前
Jcmsuite應用:脊形波導模式分析 
因此,將二維截面處理為圓形沿著y軸進行一個掃掠。另外y軸由AxisPositionX替換,即柱面軸的x方向位于AxisPositionX。當省略參數AxisPositionX時,AxisPositionX >Infinity情況收斂于未彎曲/筆直情況,這是積極地。計算出的1e-6曲率半徑的有效折射率為3.0189192705+0.0000001039i。
2051
追光ing ??? 10月前
HCP多晶變形與織構演化模擬 
從晶體學上看,錐面<a>滑移可以看作是由兩個基面<a>和兩個柱面<a>滑移疊加而成[4,5]。錐面<c+a>滑移可以提供 5 個獨立的滑移系且其滑移方向為 <1123> ,能夠很好地協調沿 c 軸方向的應變。應用黃永剛程序時默認使用三指數形式。
2936 1
晶體塑性有限元 ??? 3年前
HCP材料多晶滑移系統與Miller指數 
從晶體學上看,錐面<a>滑移可以看作是由兩個基面<a>和兩個柱面<a>滑移疊加而成[4,5]。錐面<c+a>滑移可以提供 5 個獨立的滑移系且其滑移方向為 <1123> ,能夠很好地協調沿 c 軸方向的應變。應用黃永剛程序時默認使用三指數形式。
3906 1
晶體塑性有限元 ??? 3年前
案例分享 | Adams轉鼓臺架2D_drum路面應用 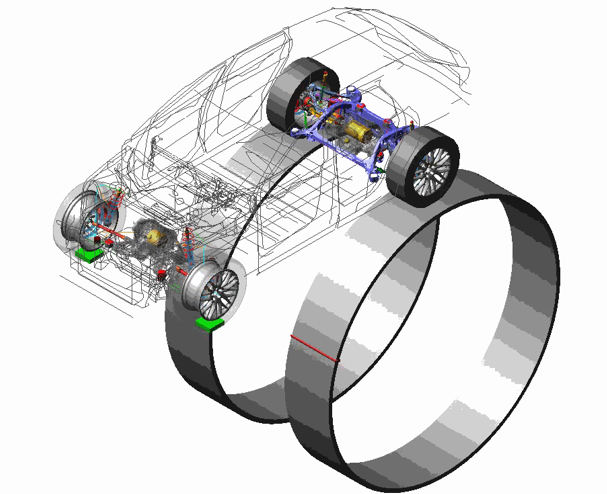
上述參數中,需要注意的是: Diameter是轉鼓半徑,一般用轉鼓外柱面時需要設為負值,正值為內柱面; V表示柱面線速度,正負與內外柱面的選擇有關,比如,外柱面且速度為正時,表示逆時針轉動; cleat系列參數表示了轉鼓上的橫擋激勵,個數,方向等,本次仿真不考慮橫擋,設為0個; Acceleration_time,表示從0到指定轉速所需的時間
4366 1 1
擺渡人張 ??? 2年前
特斯拉Model Y電池拆解 
老爺子也說了,上面的這些設計優化應該是改進,可能Model 3上已經體現,但是我們現在不可能再拆解臺現在版本的Model 3,這也印證了小編之前的觀點,特斯拉其實一直在改進,我們在Model Y上看到的一些改進或調整可能在新版的Model 3上已經體現。
3130 1
線束專家 ??? 4年前
FBD型礦用軸流式通風機葉輪氣動噪聲的數值分析 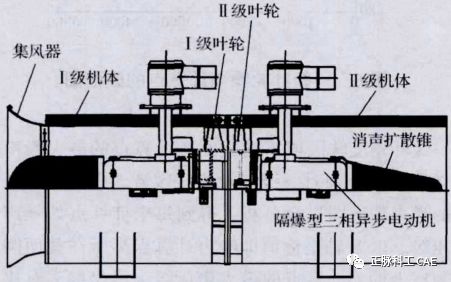
在每個截面的徑向即 Y 軸方向上分別取 7 個噪聲計算點,其 Y軸坐標分別為 270mm 、290mm 、310r a m 、330r am 、350mm 、370mm 、390mm ,旋轉區域截面及計算點所在位置如圖 5所示。圖 5 中左圖為截面所在坐標位置(從左到右依次為 1~5截面),右圖為每個截面上計算點 Y 軸的坐標位置。
2239 1
雙螺桿泵 ??? 2年前
CFD學習:Y+邊界層厚度 
usp=share_link (替代文字:摩擦速度公式) 由上式可推導出壁面剪應力方程為: 壁面剪應力公式 上式用表面摩擦系數 (C_f) 和自由流速度 (U_f) 表示。 由于邊界層厚度分析中Y+的值是由上述等式推導出來的,因此有以下幾點需要注意: 如果 Y+ <1,則第一個網格單元位于層流子層內。
7298
Cadence CFD學習 ??? 2年前
基于機械系統動力學自動分析的多噴頭3D打印機運動學研究 
圖1 柱坐式3D打印機 此結構大部分打印機的空間直角坐標系轉化為柱面坐標系(圖2)。在此坐標系下圓形曲線和矩陣變換易于表達。設P(x,y,z)為空間內一點,并設點P在x Oy面上的投影N的極坐標為(ρ,θ),則稱(ρ,θ,z)為P的柱面坐標。并規定范圍是:0≤ρ<+∞,0≤θ≤2π,-∞<z<+∞。
4505 4
擺渡人張 ??? 2年前
20條/頁 
 106
106 跳至頁

技術鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP
