



和機械式旋轉(zhuǎn)激光雷達相比,MEMS固態(tài)激光雷達有哪些優(yōu)勢和劣勢? 
垂直視場角和水平視場角合稱為視場角度,我們經(jīng)常看到的FOV,說的就是它,表示激光雷達的總視野。測量時間和幀頻率:激光雷達的激光從發(fā)射到返回的時間,相當(dāng)于一個測量周期所花費的時間。時間越短對運動信息的采集就越好,高速行駛時的反應(yīng)時間就越短。縱向和水平分辨率:也叫角分辨率,相當(dāng)于我們顯示器的分辨率,度數(shù)越小,得到的圖像就越清晰。
3404
駕駛哥 ??? 4年前
一文讀懂汽車芯片--激光雷達及車規(guī)AEC-Q102認證 
從效果上來講,激光雷達線數(shù)越多,測量精度越高,安全性就越高。
2319
falab ??? 2年前
激光雷達超遠距離測距技術(shù) 
其中,激光雷達具有波束窄、分辨率高、體積小、質(zhì)量輕、精度高等優(yōu)點,空間交會對接激光雷達由主機、信息處理機及合作目標(biāo)組成。合作目標(biāo)由多個角錐棱鏡所組成的反射器陣列。由于體積功耗的限制,基于反射器合作目標(biāo)體制的交會對接雷達作用距離受限,在需要超遠距離進行激光交會對接場合必須尋求新激光雷達體制。激光通信測距一體化技術(shù)已發(fā)展的較為成熟,在激光通信的同時實現(xiàn)雙終端間距離和時鐘之間的時差測量。
1077
威睛光學(xué) ??? 2月前
【雙碳】斯倫貝謝甲烷激光雷達相機解決方案 
其激光成像、檢測和測距技術(shù)能夠測量羽流的大小和形狀,以及氣體排放率、持續(xù)時間、位置、持久性和時間。 石油圈原創(chuàng),石油圈公眾號:oilsns ▲甲烷激光雷達相機可檢測、定位、可視化和量化甲烷排放。相機將甲烷圖像疊加在傳統(tǒng)相機圖像上,顯示排放源的確切位置。
4339 1
L十七 ??? 2年前
自動駕駛汽車中的激光雷達和攝像頭傳感器融合 
雷達可以直接測量障礙物的速度。 在本文中,我們將學(xué)習(xí)融合激光雷達和攝像頭,從而利用攝像頭的分辨率、理解上下文和對物體進行分類的能力以及激光雷達技術(shù)來估計距離并查看3D世界。 攝像頭:2d傳感器 相機是一種眾所周知的傳感器,用于輸出邊界框、車道線位置、交通燈顏色、交通標(biāo)志和許多其他東西。
2426
駕駛哥 ??? 4年前
激光雷達鏡頭設(shè)計 | SYNOPSYS 光學(xué)設(shè)計軟件第73課 
其工作原理是向被測目標(biāo)發(fā)射激光束,然后測量反射或散射信號的到達時間、強弱程度等參數(shù),以確定目標(biāo)的距離、方位、運動狀態(tài)及表面光學(xué)特性,從而建立測量目標(biāo)的三維成像信息。
2186
墨光科技 ??? 1年前
Ansys Zemax | 使用 OpticStudio 進行閃光激光雷達系統(tǒng)建模(中) 
在消費類電子產(chǎn)品領(lǐng)域,工程師可利用激光雷達實現(xiàn)眾多功能,如面部識別和3D映射等。盡管激光雷達系統(tǒng)的應(yīng)用非常廣泛而且截然不同,但是 “閃光激光雷達” 解決方案通常都適用于在使用固態(tài)光學(xué)元件的目標(biāo)場景中生成可檢測的點陣列。憑借具有針對小型封裝結(jié)構(gòu)但可獲取三維空間數(shù)據(jù)方面的優(yōu)勢,固態(tài)激光雷達系統(tǒng)在智能手機和筆記本電腦等消費類電子產(chǎn)品中日益普及。
2036 1
宇熠科技 ??? 3年前
演示面陣激光雷達的工作原理 
如今,激光雷達技術(shù)不僅應(yīng)用于專業(yè)領(lǐng)域,而且應(yīng)用于消費品領(lǐng)域。以面陣激光雷達為例,由于其快速、準確的三維距離檢測和測量能力,在智能設(shè)備中得到了廣泛的應(yīng)用。在這個例子中,我們演示了一個典型的面陣激光雷達的工作原理,該雷達由光源陣列、準直透鏡系統(tǒng)以及衍射光柵作為分束器組成。分析在空間和空間頻率域中進行。
2317 2
張藝凡 ??? 2年前
機載LiDAR與傾斜攝影測量在地質(zhì)災(zāi)害中的應(yīng)用 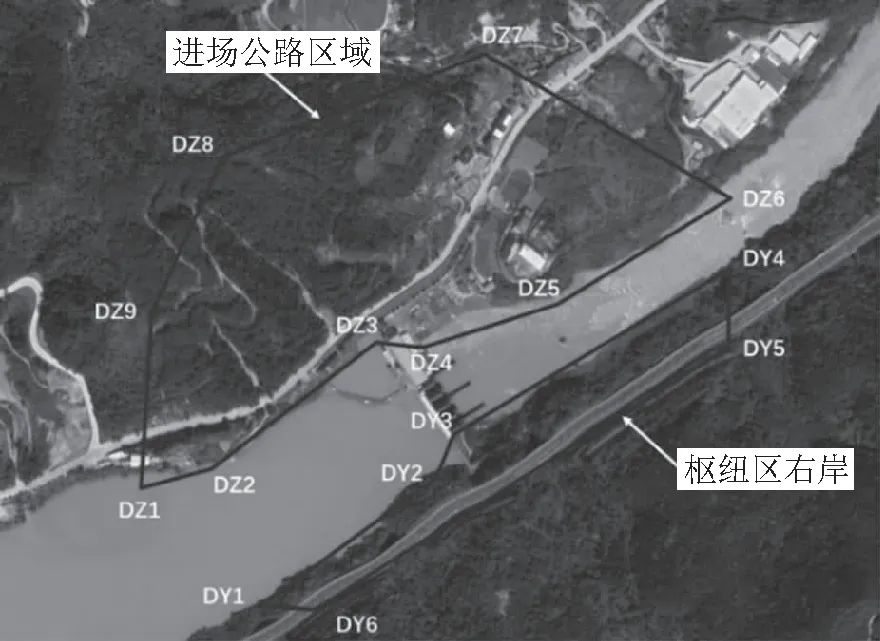
(a)研究區(qū)DSM模型 (b)研究區(qū)正射影像圖DOM (c)研究區(qū)DLG成果圖DOM (d)研究區(qū)激光點云數(shù)據(jù)DOM圖3 無人機載LiDAR和傾斜攝影數(shù)據(jù)產(chǎn)品1.2.2 機載LiDAR數(shù)據(jù)獲取由于水電站的周圍地形有許多的高山,以及植被覆蓋率高,機載激光雷達可以透過植被,測量植被覆蓋下的地形可以在被植被覆蓋的地方發(fā)現(xiàn)危險源,因此通過機載激光雷達可獲取高精度實景三維地形數(shù)據(jù)
4614 1 1
繪夢流光 ??? 3年前
Ansys Zemax | 使用OpticStudio進行閃光激光雷達系統(tǒng)建模(下) 
在消費類電子產(chǎn)品領(lǐng)域,工程師可利用激光雷達實現(xiàn)眾多功能,如面部識別和3D映射等。盡管激光雷達系統(tǒng)的應(yīng)用非常廣泛而且截然不同,而“閃存激光雷達”解決方案適用于在使用固態(tài)光學(xué)元件的目標(biāo)場景中生成可檢測的點陣列。 憑借在針對小型封裝獲取三維空間數(shù)據(jù)方面的優(yōu)勢,固態(tài)激光雷達系統(tǒng)在智能手機和筆記本電腦等消費類電子產(chǎn)品中日益普及。
2350 1 1
宇熠科技 ??? 3年前
激光測距傳感器在智能交通領(lǐng)域的應(yīng)用 
激光測距傳感器由于光束發(fā)散角度較小,便于測速取證,不像雷達多普勒測速儀,在多車道測量時不能確知超速的具體車輛,且由于激光測速傳感器發(fā)射的是近紅外的光波,不能被雷達探測器、電子狗等探側(cè),且不易受市區(qū)雷達雜波干擾。
2375
威睛光學(xué) ??? 2月前
從原理到應(yīng)用教你了解毫米波雷達 
圖8 常用感知傳感器性能對比[5]2)應(yīng)用算法重新設(shè)計:除了改進毫米波雷達點云,信號處理后的應(yīng)用算法也至關(guān)重要。目前,許多毫米波雷達的應(yīng)用算法是在相應(yīng)激光雷達算法的基礎(chǔ)上修改而來。毫米波雷達的特殊性,如速度測量能力和在極端環(huán)境下的自適應(yīng)能力,需要未來進一步研究。在感知任務(wù)方面,多模態(tài)融合無疑是未來的發(fā)展方向。然而,在極端天氣條件下,雷達與其他傳感器的集成是否會降低其穩(wěn)健性,仍需深入探討。
4543 1
無人機圈 ??? 2年前
[VirtualLab] 演示面陣激光雷達的工作原理 ![[VirtualLab] 演示面陣激光雷達的工作原理](https://img.jishulink.com/msimage/202509/f7d55bb2ee569b89ee23b6473a8a930b.jpg?image_process=resize,fw_294,fh_172,)
摘要 如今,激光雷達技術(shù)不僅應(yīng)用于專業(yè)領(lǐng)域,而且應(yīng)用于消費品領(lǐng)域。以面陣激光雷達為例,由于其快速、準確的三維距離檢測和測量能力,在智能設(shè)備中得到了廣泛的應(yīng)用。在這個例子中,我們演示了一個典型的面陣激光雷達的工作原理,該雷達由光源陣列、準直透鏡系統(tǒng)以及衍射光柵作為分束器組成。分析在空間和空間頻率域中進行。
1697
信光嗎 ??? 8月前
氮化硼在電子工程,冶金及激光技術(shù)中的應(yīng)用
三、氮化硼在激光技術(shù)中的應(yīng)用1. 激光加工:氮化硼可以用作激光加工的靶材,通過高能激光束的照射,可以實現(xiàn)氮化硼材料的快速切割、打孔、焊接等加工操作。這種加工方式具有高精度、高效率和高柔性的特點,在微納制造、集成電路制造等領(lǐng)域有廣泛應(yīng)用。2. 激光雷達:氮化硼可以作為激光雷達的介質(zhì)材料,用于目標(biāo)探測、距離測量和速度測量等應(yīng)用。
2932
晶瑞孫618 ??? 11月前
康謀技術(shù) | 自動駕駛傳感器標(biāo)定技術(shù):從單一到聯(lián)合標(biāo)定 
其中多傳感器標(biāo)定是通過傳感器的測量信息來求解不同傳感器之間的位姿變換。下面就以激光雷達為例,進一步分析傳感器與車身標(biāo)定(單一標(biāo)定)和多傳感器標(biāo)定(聯(lián)合標(biāo)定)。二、單一標(biāo)定和聯(lián)合標(biāo)定1、單一標(biāo)定在激光雷達與車身標(biāo)定過程中,首先要安裝激光雷達,并確定車輛坐標(biāo)系,隨后通過測量工具記錄其相對于車輛坐標(biāo)系的位置和方向。
2257
康謀keymotek ??? 1年前
超聲波液位開關(guān)在發(fā)電機液位測量的方式 
下面工采網(wǎng)小編和大家一起看看超聲波液位開關(guān)在發(fā)電機液位測量的方式。 隨著科技的發(fā)展,人們研制出多種液位檢測方法,如浮子式、壓力式、電容式等。由于發(fā)電機油箱密封,易燃、易爆,對壓強要求高,非接觸式液位檢測方法是首選。常見的非接觸式液位檢測方法有雷達式液位檢測、激光式液位檢測、基于圖像視覺的液位檢測等等。
2090
工采網(wǎng) ??? 3年前
康謀分享 | aiSim5激光雷達LiDAR模型驗證方法(二) 
圖7:同車道遠端車輛點云對比當(dāng)然,在一些場景下,真實的激光雷達(綠色)激光束穿透玻璃表面的比例高于仿真(紅色)的結(jié)果。圖8:玻璃材質(zhì)穿透對比以上就是驗證aiSim激光雷達LiDAR模型的驗證方法。
2230
康謀keymotek ??? 2年前
激光測距傳感器模塊在筒倉料位監(jiān)測中的應(yīng)用方案 
,激光測距傳感器模塊L2-80采用光測量,所以一切工作思路請遵循光的特性來開展,如光的反射性、穿透性等特性。
2338
摩天射頻 ??? 1年前
讓你從古到今的了解什么是“車規(guī)級” 
1.4 激光雷達器件過“車規(guī)”,不等于激光雷達也過了“車規(guī)”講了半天,小伙伴發(fā)現(xiàn)一個問題沒有,我最初提的問題是“激光器件Laser Components”有“車規(guī)級”標(biāo)準嗎?而不是問“激光雷達”,為什么?
2259
falab ??? 2年前
關(guān)于自動駕駛路線之爭的一些思考 
(2)毫米波雷達:主動傳感器,與激光雷達工作原理類似,區(qū)別是使用無線電波而不是激光,視距范圍比激光雷達更大,尤其是對近距離物體的探測,毫米波雷達可以實現(xiàn)在1米范圍內(nèi)探測到物體,但毫米波雷達的空間分辨率較低,隨著距離增加,對于小特征的分辨能力降低,不過毫米波雷達利用多普勒頻移可以直接測量速度,同時在黑暗、雨、雪、霧天氣下均能保持良好的魯棒性,此外,毫米波雷達對物體的分類性能較差,同樣也無法識別二維結(jié)構(gòu)
1712 1 1
木火柴 ??? 4年前
20條/頁 
跳至頁

技術(shù)鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓(xùn)客服
- 平臺客服
TOP
