毫米波雷達(mmWave Rader)采用毫米波作為電磁波發(fā)送信號,捕捉并處理電磁波經(jīng)過路徑障礙物的反射信號后可獲取目標物體的
速度、距離、方位角和高度
等信息。
毫米波的波長范圍為0-10mm,在電磁頻譜中這種波長被視為短波長。采用毫米波作為電磁波信號能夠獲取高精度的測距信息,同時天線也可以做的更小和緊湊減小設備體積。工作頻率為 76–81GHz(對應波長約為 4mm)的毫米波系統(tǒng)將能夠檢測小至零點幾毫米的移動。
毫米波雷達距離測量的基本原理是,計算發(fā)射電磁波與接收反射電磁波之間的時間差
,并通過電磁波傳播速度
估算目標物體距離
,公式為
。如下圖1所示為FMCW (Frequency Modulated Continuous Wave)雷達主射頻組件的簡化框圖。
②將線性調頻脈沖通過發(fā)射天線發(fā)射出去;
④通過混頻器將發(fā)射信號和接收信號合并到一起,生成中頻(IF)信號,并通過IF信號計算時間差
。
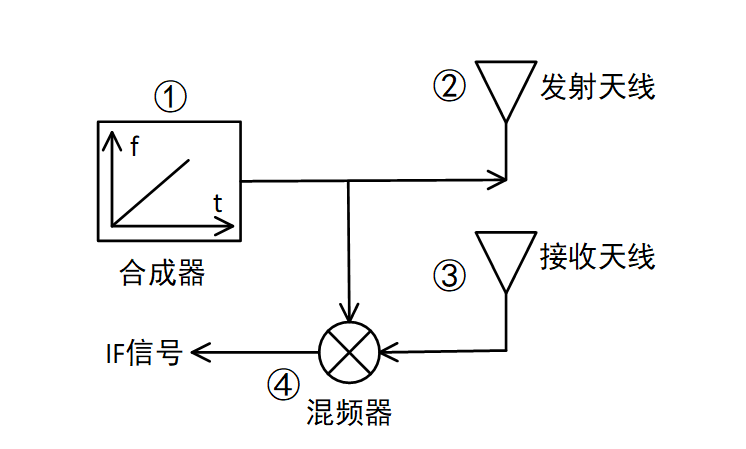
圖1 FMCW雷達框圖[1]
混頻器是一個
電子組件能夠將兩個信號合并在一
起并生成新的頻率的信號,生成的新頻率等于兩個輸入正弦信號頻率差,相位差等于兩個輸入信號的相位差。
圖2所示為毫米波雷達經(jīng)過以上流程后檢測單個物體獲取的IF信號。
當電磁波經(jīng)過路徑有多個障礙物時,接收天線會接收到多個反射信號,生成多個信號頻率固定的IF單音信號,通過傅里葉變換即可分離IF信號中不同單音,因此毫米波雷達能夠同時檢測多個目標物體的距離。
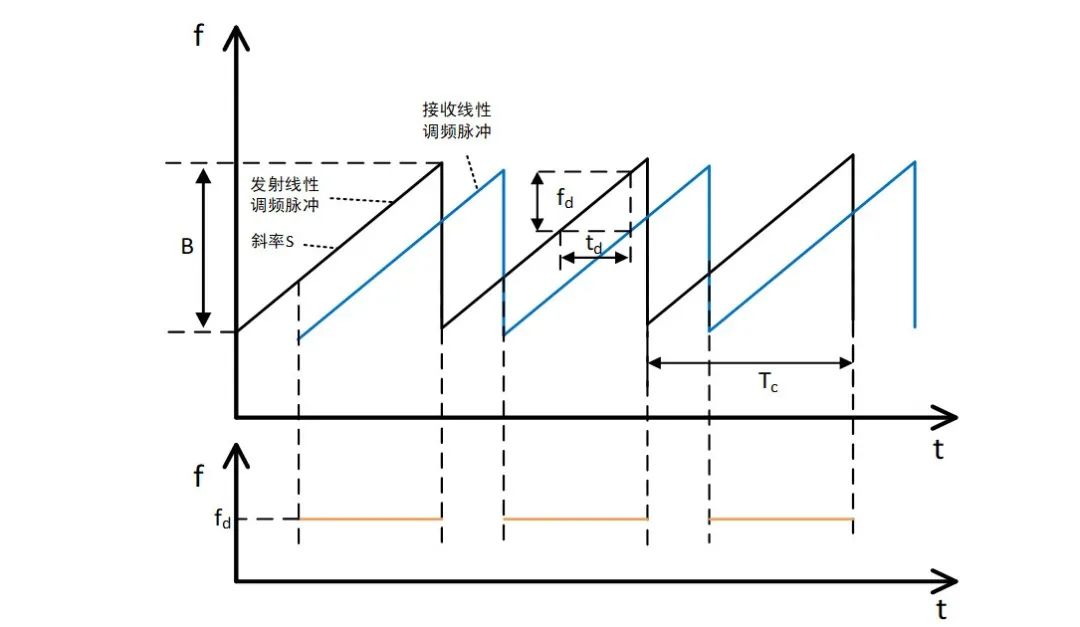 圖2 毫米波雷達檢測單個物體[1]
圖2 毫米波雷達檢測單個物體[1]
FMCW毫米波雷達會發(fā)射兩個間隔為
的線性調頻脈沖用于測速,如下圖6所示。每個反射的線性調頻脈沖通過FFT處理后,可獲取到物體的距離信息(距離FFT)。每個線性調頻脈沖的距離FFT會在同一位置出現(xiàn)峰值相同,相位不同。測得相位差對應于速度為
物體的移動。當有多個具有不同速度的物體在同一距離時,雙線性調頻脈沖速度測量方法將不起作用,需要發(fā)送N個線性調頻脈沖并通過多普勒FFT可以計算出相同距離多個物體的速度。
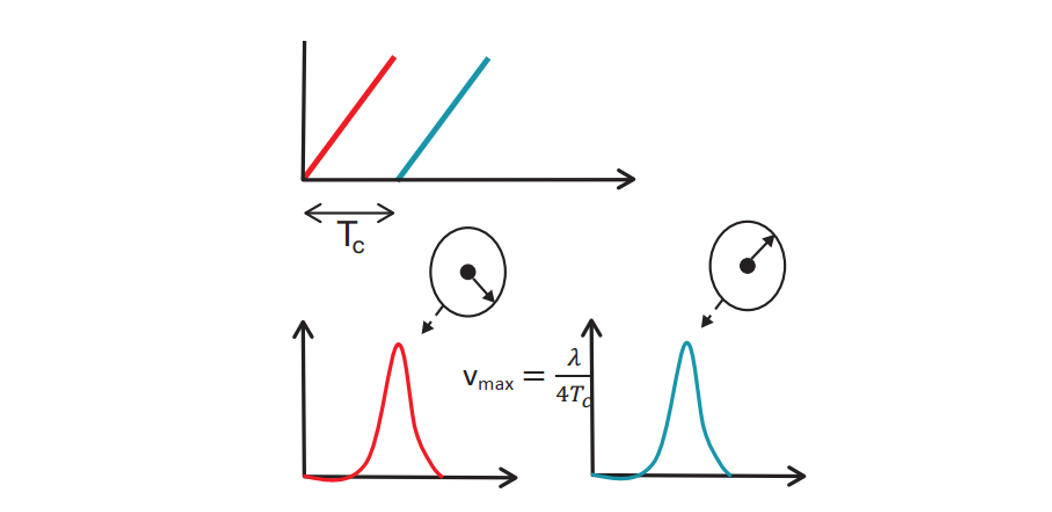 圖3 雙線性調頻脈沖速度測量[1]
FMCW毫米波雷達至少需要兩個接收天線才能測出目標物體角度信息。圖4為毫米雷達角度檢測原理,目標到天線的差分距離
很小的變化就會導致距離FFT或多普勒FFT峰值相位的變化,該結果可被用于執(zhí)行角度估算,進行角度估算至少需要兩個天線。
相位變化與距離間的數(shù)據(jù)推導公式為:
,假設接收天線接收的波形為平面波,接收天線之間的距離為
,則
。因此到達角可以根據(jù)公式
計算出來。如下圖5所示,
取決于
,是一種非線性依賴的關系,
僅在
的值很小時,才是線性近似。因此當接近0°時角度估算準確度最高,接近90°時角度估算準確度降低。
毫米波雷達目前常應用于汽車、消費、工業(yè)以及醫(yī)療等領域。汽車是其最早的商用場景,同時也是其目前最大的應用市場。隨著近些年人工智能與機器人技術的發(fā)展,毫米波雷達應用于機器人場景的也越來越多,本文主要介紹毫米波雷達在機器人領域的應用場景。
采用毫米波雷達作為機器人感知傳感器,可實現(xiàn)機器人的導航與障礙物規(guī)避,與IMU、里程計、攝像頭等傳感器融合后可以實現(xiàn)對環(huán)境的建圖等功能。如下視頻1為TI公司工程師在ROS中使用毫米波雷達實現(xiàn)機器人的障礙物避障與導航效果,視頻中機器人能夠快速的避開障礙物并能夠檢測到路徑中的玻璃擋板。毫米波雷達作為感知模塊相較于攝像頭和激光雷達等傳感器,能夠識別玻璃并能穿透濃霧,因此在機器人導航與避障時增加毫米波雷達能夠增加整個系統(tǒng)的魯棒性。
圖3 雙線性調頻脈沖速度測量[1]
FMCW毫米波雷達至少需要兩個接收天線才能測出目標物體角度信息。圖4為毫米雷達角度檢測原理,目標到天線的差分距離
很小的變化就會導致距離FFT或多普勒FFT峰值相位的變化,該結果可被用于執(zhí)行角度估算,進行角度估算至少需要兩個天線。
相位變化與距離間的數(shù)據(jù)推導公式為:
,假設接收天線接收的波形為平面波,接收天線之間的距離為
,則
。因此到達角可以根據(jù)公式
計算出來。如下圖5所示,
取決于
,是一種非線性依賴的關系,
僅在
的值很小時,才是線性近似。因此當接近0°時角度估算準確度最高,接近90°時角度估算準確度降低。
毫米波雷達目前常應用于汽車、消費、工業(yè)以及醫(yī)療等領域。汽車是其最早的商用場景,同時也是其目前最大的應用市場。隨著近些年人工智能與機器人技術的發(fā)展,毫米波雷達應用于機器人場景的也越來越多,本文主要介紹毫米波雷達在機器人領域的應用場景。
采用毫米波雷達作為機器人感知傳感器,可實現(xiàn)機器人的導航與障礙物規(guī)避,與IMU、里程計、攝像頭等傳感器融合后可以實現(xiàn)對環(huán)境的建圖等功能。如下視頻1為TI公司工程師在ROS中使用毫米波雷達實現(xiàn)機器人的障礙物避障與導航效果,視頻中機器人能夠快速的避開障礙物并能夠檢測到路徑中的玻璃擋板。毫米波雷達作為感知模塊相較于攝像頭和激光雷達等傳感器,能夠識別玻璃并能穿透濃霧,因此在機器人導航與避障時增加毫米波雷達能夠增加整個系統(tǒng)的魯棒性。
視頻1 TI公司工程師在ROS中使用毫米波雷達實現(xiàn)機器人的障礙物避障與導航效果[3]
多目標跟蹤算法能夠根據(jù)傳感器的數(shù)據(jù)對多個目標進行跟蹤和識別,這類傳感器可以是攝像頭、激光雷達和毫米波雷達等,也可以是幾種傳感器的組合。毫米波雷達在多目標跟蹤算法中可以通過計算到目標的速度、方向和距離等參數(shù),對目標進行分組和檢測,并跟蹤目標物體的運動。
如下視頻2所展示的為TI實驗室采用毫米波雷達在移動機器人上進行障礙物跟蹤與識別的效果,算法將毫米波雷達獲取到的數(shù)據(jù)處理后輸出點云信息和障礙物的位置信息,視頻中可以看到毫米波雷達可以很輕松地在靜止或移動的情況下識別并跟蹤目標障礙物。
視頻2 TI實驗室采用毫米波雷達在移動機器人上進行障礙物跟蹤與識別的效果[3]
在多目標跟蹤算法中毫米波雷達相比攝像頭優(yōu)勢在于能夠直接獲取到檢測目標的速度,并能在黑夜和大霧環(huán)境下實現(xiàn)檢測目標物體的檢測與跟蹤。下圖6所示為毫米波雷達在黑夜環(huán)境下對微小無人機的識別效果,紅框中的為攝像頭檢測到的無人機,黃框中為毫米波雷達檢測到的無人機點云數(shù)據(jù)。
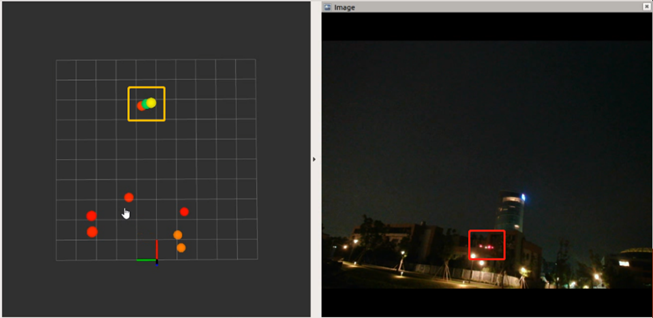 圖
6 毫米波雷達黑夜環(huán)境下的無人機檢測
圖
6 毫米波雷達黑夜環(huán)境下的無人機檢測
毫米波雷達可以發(fā)射毫米波信號,并通過測量信號的反射時間和強度來獲取目標物體的位置、速度和角度等信息。這使得毫米波雷達能夠實現(xiàn)對周圍環(huán)境的精確三維感知。通過對多個角度和方向的掃描,毫米波雷達可以生成一個準確的三維點云,其中包含了物體的位置、形狀以及相對速度等信息。利用毫米波雷達的感知數(shù)據(jù),可以創(chuàng)建環(huán)境地圖,這些地圖通常被稱為環(huán)境建圖或感知地圖。這些地圖可以顯示道路、建筑物、障礙物等環(huán)境特征,有助于自動駕駛系統(tǒng)做出決策和規(guī)劃路徑。毫米波雷達的高分辨率使其能夠檢測到較小的物體,如行人和自行車,從而提供更詳細和準確的地圖數(shù)據(jù)。
下圖7為四個毫米波雷達分別朝四個方向安裝在TurtleBot上,實現(xiàn)機器人3D感知與建圖的效果圖,3D建圖能夠提供小于1°的角度分辨率,在建圖的同時能夠獲取到機器人室內實時的定位數(shù)據(jù),建圖效果如下視頻3所示。
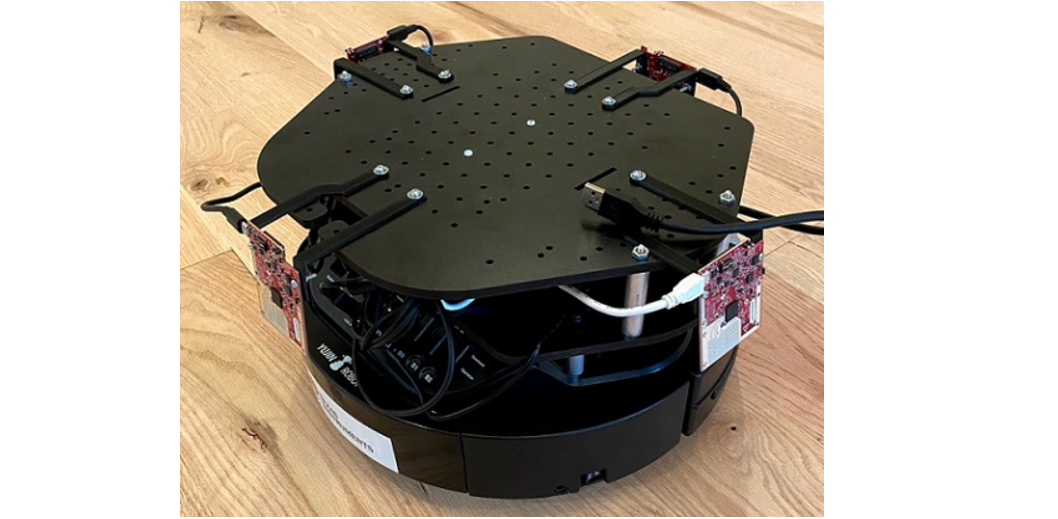 圖7 turtleBot毫米波雷達安裝[3]
圖7 turtleBot毫米波雷達安裝[3]
毫米波雷達具備在機器人、自動駕駛等技術領域引發(fā)重大變革的潛力,然而尚未達到成熟階段。毫米波雷達的未來發(fā)展趨勢可能主要受以下幾個因素影響:
1)點云質量的提升:毫米波雷達點云在數(shù)據(jù)格式中最為常見,但其質量相較于其他傳感器較低,下圖8展示了毫米波雷達與當前常用感知傳感器性能的對比。雷達的多徑效應等特性嚴重影響點云數(shù)據(jù)質量。急需改善信號處理流程中的信息損失,特別是通過采用精心設計的基于學習的方法替代恒虛警率自適應檢測(CFAR)。基于學習的方向估計(DOA)方法,而非波束賦形(DBF)方法,也可用于超分辨率角度估計。
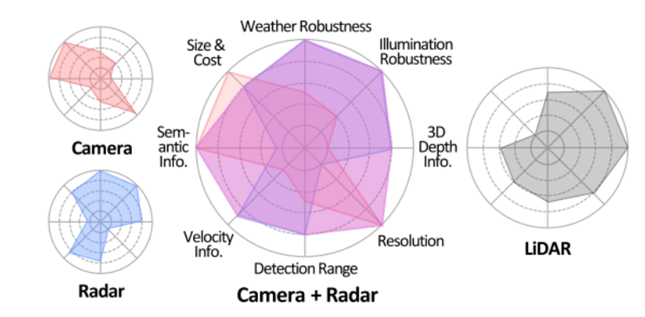 圖8 常用感知傳感器性能對比[5]
圖8 常用感知傳感器性能對比[5]
2)應用算法重新設計:除了改進毫米波雷達點云,信號處理后的應用算法也至關重要。目前,許多毫米波雷達的應用算法是在相應激光雷達算法的基礎上修改而來。毫米波雷達的特殊性,如速度測量能力和在極端環(huán)境下的自適應能力,需要未來進一步研究。在感知任務方面,多模態(tài)融合無疑是未來的發(fā)展方向。然而,在極端天氣條件下,雷達與其他傳感器的集成是否會降低其穩(wěn)健性,仍需深入探討。對于毫米波雷達的定位和地圖繪制,與激光雷達和相機的融合仍有巨大的創(chuàng)新空間。
3)充分利用前端數(shù)據(jù):針對毫米波雷達信號處理中的獨特數(shù)據(jù)格式,如原始ADC數(shù)據(jù)、RD圖和4D張量,利用這些數(shù)據(jù)進行感知、定位和映射是一個有趣且尚未被充分探索的領域。基于學習的模型有望從這些數(shù)據(jù)中獲取豐富信息,同時保持良好的實時性能,這可能會成為未來研究的一個重要方向。
4)擴充數(shù)據(jù)集:與其他基于數(shù)據(jù)驅動的研究領域一樣,數(shù)據(jù)集在毫米波雷達的相關研究中扮演著關鍵角色。然而,目前可用的毫米波雷達數(shù)據(jù)集還相對有限,數(shù)據(jù)格式和場景豐富性有待進一步擴展。為此,我們需要在數(shù)據(jù)集方面投入更多的努力,以支持毫米波雷達研究的深入發(fā)展。
參考鏈接
[1]https://www.ti.com.cn/cn/lit/wp/zhcy075/zhcy075.pdf?ts=1692074586217&ref_url=https%3A%2F%2Fwww.ti.com.cn%2Fproduct%2Fcn%2FIWR1843
[2]https://blog.csdn.net/qq_39764867/article/details/108883896
[3
]
https://dev.ti.com/tirex/explore/node?
node=A__AADmvwTa5NEerQpNX45UAg__radar_toolbox__1AslXXD__LATEST
[4]
https://www.bilibili.com/video/BV1HA411z7S2/?spm_id_from=333.337.search-card.all.click&vd_source=ea0befe86c9aad224259deb98ff3b82e
[5]https://mp.weixin.qq.com/s?__biz=Mzg2NzUxNTU1OA==&mid=2247541556&idx=1&sn=6d56e33f87fb9f6ec9f2ec2b192a3c80&chksm=ceb80efdf9cf87ebe7b3ff64af3d3dbb0f72b164419665eb6336eac9a489cff281d35dd1b077&token=191443380&lang=zh_CN#rd
[6]https://www.auto-testing.net/news/show-115243.html
[7]https://zhuanlan.zhihu.com/p/621407954
[8]https://zhuanlan.zhihu.com/p/635927756?utm_id=0
文章來源:無人機網(wǎng)


























