



OptiSystem應(yīng)用:光纖陀螺儀系統(tǒng)設(shè)計(jì) 
光纖陀螺儀系統(tǒng)設(shè)計(jì):DC檢測(cè)方法[1]使用理想元件,輸出光電流(I)為其中φs 是薩格納克相移 , Io 是以零角速度情況計(jì)算出的電流P 是光源光功率, σ 是光電檢測(cè)器的響應(yīng)度(在我們的案例中等于1)。在等式(2)中將光功率除以2是因?yàn)樵隈詈掀魈幑β蕮p失了一半。
2146
追光ing ??? 8月前
OptiSystem應(yīng)用:光纖陀螺儀系統(tǒng)設(shè)計(jì) 
光纖陀螺儀系統(tǒng)設(shè)計(jì):DC檢測(cè)方法[1] 使用理想元件,輸出光電流(I)為 (1) 其中 φs 是薩格納克相移 , Io 是以零角速度情況計(jì)算出的電流 (2) P 是光源光功率, σ 是光電檢測(cè)器的響應(yīng)度(在我們的案例中等于1)。在等式(2)中將光功率除以2是因?yàn)樵隈詈掀魈幑β蕮p失了一半。
1557
信光嗎 ??? 9月前
OptiSystem應(yīng)用:光纖陀螺儀系統(tǒng)設(shè)計(jì) 
圖1.FOG DC檢測(cè)布局 光纖陀螺儀系統(tǒng)設(shè)計(jì):相位調(diào)制方法[2] 當(dāng)嘗試測(cè)量非常低的角旋轉(zhuǎn)速率時(shí),DC方法不是很準(zhǔn)確,所以通常使用相位調(diào)制技術(shù)。
1874
信光嗎 ??? 8月前
OptiSystem應(yīng)用:光纖陀螺儀系統(tǒng)設(shè)計(jì)
光纖陀螺儀系統(tǒng)設(shè)計(jì):DC檢測(cè)方法[1]使用理想元件,輸出光電流(I)為其中φs 是薩格納克相移 , Io 是以零角速度情況計(jì)算出的電流P 是光源光功率, σ 是光電檢測(cè)器的響應(yīng)度(在我們的案例中等于1)。在等式(2)中將光功率除以2是因?yàn)樵隈詈掀魈幑β蕮p失了一半。
2403
追光ing ??? 1年前
OptiSystem應(yīng)用:光纖陀螺儀系統(tǒng)設(shè)計(jì)
光纖陀螺儀系統(tǒng)設(shè)計(jì):DC檢測(cè)方法[1]使用理想元件,輸出光電流(I)為其中φs 是薩格納克相移 , Io 是以零角速度情況計(jì)算出的電流P 是光源光功率, σ 是光電檢測(cè)器的響應(yīng)度(在我們的案例中等于1)。在等式(2)中將光功率除以2是因?yàn)樵隈詈掀魈幑β蕮p失了一半。
1763
追光ing ??? 9月前
OptiSystem應(yīng)用:光纖陀螺儀系統(tǒng)設(shè)計(jì) 
光纖陀螺儀系統(tǒng)設(shè)計(jì):DC檢測(cè)方法[1] 使用理想元件,輸出光電流(I)為 (1) 其中 φs 是薩格納克相移 , Io 是以零角速度情況計(jì)算出的電流 (2) P 是光源光功率, σ 是光電檢測(cè)器的響應(yīng)度(在我們的案例中等于1)。在等式(2)中將光功率除以2是因?yàn)樵隈詈掀魈幑β蕮p失了一半。
2331
追光ing ??? 2年前
IMU, 自動(dòng)駕駛定位團(tuán)隊(duì)“小而美”的隊(duì)員 
隨著物理學(xué)的不斷進(jìn)步,陀螺儀的類型也越來(lái)越多,精度也越來(lái)越高。目前熟知的有光纖陀螺儀、激光陀螺儀和MEMS陀螺儀。MEMS陀螺儀雖然精度不如光纖和激光陀螺儀,但其體積小、功耗低、成本低、易于批量生產(chǎn)等特點(diǎn),使其成為自動(dòng)駕駛領(lǐng)域非常重要的一塊拼圖。 MEMS陀螺儀的角速度測(cè)量原理便是基于一種非真實(shí)存在的力—科里奧利力。
2158
駕駛哥 ??? 4年前
使用 COMSOL 對(duì)慣性傳感器進(jìn)行仿真 
壓電速率陀螺儀就是根據(jù)類似的原理工作的。接下來(lái),我們來(lái)探索一個(gè)陀螺儀模型,了解它是如何工作的。模擬的音叉陀螺儀示意圖,顯示了通過(guò)器件中心和關(guān)鍵組件的對(duì)稱平面。陀螺儀中心的矩形結(jié)構(gòu)是它的懸架。該組件的支撐錨固定在安裝陀螺儀的器件上。兩對(duì)突出的組件是驅(qū)動(dòng)尖齒和感應(yīng)尖齒。兩組尖齒上的電極使它們能夠提供有關(guān)器件方向的有用數(shù)據(jù)。
2747
我是小能 ??? 3年前
Appl. Phys. Rev. | Sagnac干涉在集成光子學(xué)中的應(yīng)用 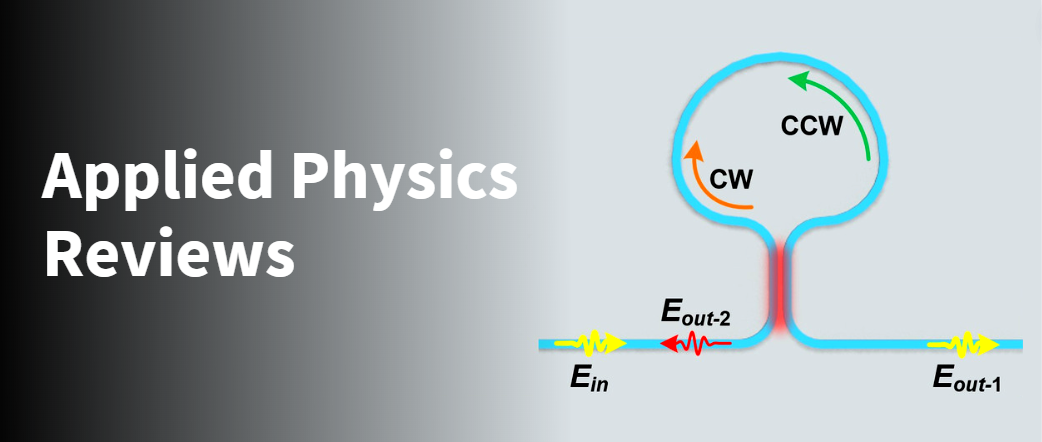
其中光陀螺儀作為Sagnac干涉的典型應(yīng)用,又具體分為基于波導(dǎo)干涉的光陀螺儀,基于無(wú)源諧振腔的光陀螺儀,和基于布里淵環(huán)形激光器的光陀螺儀。
3250
光與影 ??? 3年前
【見(jiàn)多識(shí)廣】高端進(jìn)口CNC機(jī)床帶有GPS定位鎖定功能,你見(jiàn)過(guò)嗎? 
業(yè)界比較流行的說(shuō)法有兩種:有人說(shuō)是安裝了GPS定位模塊,也有人說(shuō)是安裝了陀螺儀或者水平儀,裝置感應(yīng)到機(jī)床晃動(dòng)超過(guò)一定角度,就會(huì)將系統(tǒng)鎖死,需要密碼解鎖。 然而,小編仔細(xì)想了想并請(qǐng)教了幾位安裝調(diào)試的工程師朋友,都一致認(rèn)為第一種說(shuō)法是有問(wèn)題的。
2149
學(xué)數(shù)控 ??? 4年前
說(shuō)透互補(bǔ)濾波(1) - 線性互補(bǔ)濾波器從原理到實(shí)現(xiàn) 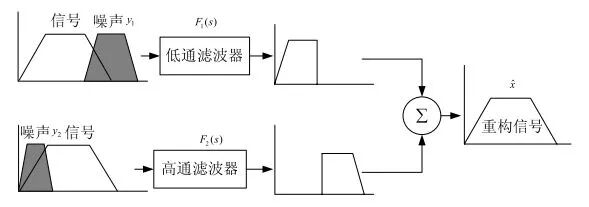
零初始狀態(tài)只用陀螺儀積分得到的陀螺儀,則非常平滑,無(wú)法感知到高頻部分的數(shù)據(jù),但是靜止時(shí)得到的角度有偏離,不是0度,符合陀螺儀動(dòng)態(tài)響應(yīng)效果好的特點(diǎn)。傳統(tǒng)互補(bǔ)濾波器和Mahony濾波器確實(shí)都能夠結(jié)合兩者的特點(diǎn),在15s處能得到更多的姿態(tài)信息。
3444 4 2
無(wú)人機(jī)干貨鋪 ??? 3年前
三坐標(biāo)檢測(cè)船舶慣導(dǎo)系統(tǒng)關(guān)鍵零部件的四孔行星定位結(jié)構(gòu)幾何精度 
慣導(dǎo)系統(tǒng)內(nèi)部關(guān)鍵零部件帶4孔定位,內(nèi)裝光纖陀螺儀,安裝的陀螺儀需要保障準(zhǔn)確的位置度及角度關(guān)系,因此,該零件需要對(duì)上下頂面的平面度,前后左右圓柱的同軸度、垂直度、各孔的直徑以及4孔兩兩同軸度及4孔的孔軸線交點(diǎn)位置,各孔之間角度有著很高的檢測(cè)精度要求。 該核心部件采用四孔行星定位結(jié)構(gòu),其幾何精度直接決定陀螺儀測(cè)量基準(zhǔn)的可靠性。
2043
深圳市中圖儀器股份有限公司 ??? 9月前
一期一會(huì) | 什么是MEMS器件? 
MEMS加速計(jì)、陀螺儀和其它慣性傳感器被廣泛用于航空航天領(lǐng)域,在該領(lǐng)域中,一切都在高速運(yùn)轉(zhuǎn),所以傳感操作需要極高的精度。此外,MEMS還可用于小型能量收集應(yīng)用,其不僅可為醫(yī)療及健康監(jiān)控可穿戴設(shè)備和植入式醫(yī)療器械(IMD)(屬于bioMEMS子領(lǐng)域)供電,而且還可為其它小型便攜式電子產(chǎn)品供電。
2474
Ansys中國(guó) ??? 4月前
【5/18更新】本田又秀黑科技,自平衡摩托升級(jí) 
位于車輛下部的六枚鋰電池除儲(chǔ)存電力外,還具備陀螺儀的功能,通過(guò)左右轉(zhuǎn)動(dòng)來(lái)調(diào)整整體重心,而轉(zhuǎn)動(dòng)的動(dòng)力則來(lái)自后輪的電動(dòng)馬達(dá)。MOTOROiD已經(jīng)贏得了世界上三大設(shè)計(jì)獎(jiǎng),紅點(diǎn)獎(jiǎng)、IF設(shè)計(jì)大獎(jiǎng)和國(guó)際設(shè)計(jì)卓越獎(jiǎng)的金獎(jiǎng)。
2586
技術(shù)鄰CAD學(xué)習(xí) ??? 4年前
飛行器系統(tǒng)仿真與驗(yàn)證 
圖5信號(hào)與控制庫(kù)元件模型 圖6 陀螺儀/加速度計(jì)/GPS等傳感器 以三軸陀螺穩(wěn)定平臺(tái)的慣航系統(tǒng)為例,陀螺和加速度計(jì)被直接固聯(lián)在平臺(tái)上,直接測(cè)量運(yùn)載體的角運(yùn)動(dòng)和線運(yùn)動(dòng),將慣性敏感器輸出的量測(cè)信息經(jīng)誤差補(bǔ)償后直接送至導(dǎo)航計(jì)算機(jī)中進(jìn)行實(shí)時(shí)的姿態(tài)矩陣的計(jì)算,通過(guò)姿態(tài)矩陣把慣性導(dǎo)航系統(tǒng)中加速度計(jì)測(cè)量的沿運(yùn)載體坐標(biāo)系的比力信息,轉(zhuǎn)換到導(dǎo)航坐標(biāo)系中,并求解出運(yùn)載體的加速度的大小
3814 2 1
航發(fā)設(shè)計(jì) ??? 3年前
最常見(jiàn)的AGV導(dǎo)航方式有哪些?5種方法詳細(xì)說(shuō)明 
慣性導(dǎo)航是利用移動(dòng)機(jī)器人內(nèi)部傳感器(光電編碼器,陀螺儀)獲取機(jī)器人的位置和姿態(tài),通常作為輔助定位。二維碼導(dǎo)航優(yōu)點(diǎn):定位精確,小巧靈活,鋪設(shè)、改變路徑也較容易,便于控制通訊,對(duì)聲光無(wú)干擾。二維碼導(dǎo)航缺點(diǎn):路徑需要定期維護(hù),如果場(chǎng)地復(fù)雜,則需要頻繁更換二維碼,對(duì)陀螺儀的精度及使用壽命要求嚴(yán)格,另外對(duì)場(chǎng)地平整度有一定要求,價(jià)格相對(duì)較高。
3541
工廠物流自動(dòng)化 ??? 3年前
穿透數(shù)據(jù)迷霧:2025 年可穿戴設(shè)備測(cè)試的技術(shù)突破與實(shí)踐路徑 
(一)多傳感器融合的精度校驗(yàn)難題當(dāng)前主流設(shè)備普遍采用 "加速度計(jì) + 陀螺儀 + 生物傳感器" 的多模組方案,例如某旗艦智能手表集成了 12 種傳感器,數(shù)據(jù)交互復(fù)雜度較三年前提升 4 倍。這種融合帶來(lái)了兩個(gè)核心測(cè)試痛點(diǎn):一是不同傳感器數(shù)據(jù)的時(shí)間同步誤差,二是復(fù)雜運(yùn)動(dòng)下的耦合干擾。某運(yùn)動(dòng)手環(huán)測(cè)試數(shù)據(jù)顯示,未校準(zhǔn)前的跑步步頻識(shí)別誤差可達(dá) 15%,主要源于加速度計(jì)與陀螺儀的采樣頻率不同步。
2532
德基西瓜 ??? 7月前
10張高清大圖!讀懂十大國(guó)產(chǎn)MEMS廠商技術(shù)路線 
從技術(shù)上看,美新半導(dǎo)體近幾年的技術(shù)主要布局于半導(dǎo)體封裝、集成式傳感器、磁場(chǎng)傳感器、微機(jī)電系統(tǒng)器件測(cè)試等細(xì)分技術(shù)領(lǐng)域,致力于提高三軸陀螺儀集成度、使三軸陀螺儀結(jié)構(gòu)整體合理緊湊、提高器件可靠性等。 五、上海矽睿科技股份有限公司矽睿科技成立于2012年,專注于高質(zhì)量傳感器產(chǎn)品的設(shè)計(jì)、制造、以及增值應(yīng)用與服務(wù),致力于成為以應(yīng)用為導(dǎo)向的多傳感器平臺(tái)。
2612 2 1
蘇格不拉底 ??? 3年前
AR 眼鏡硬件可靠性測(cè)試方法 
關(guān)鍵檢測(cè)點(diǎn): 外觀檢查:鏡片是否開(kāi)裂、鏡框是否變形、接縫處是否松動(dòng); 功能驗(yàn)證:光學(xué)顯示是否正常(如有無(wú)暗斑、圖像偏移)、傳感器功能是否失靈(如陀螺儀數(shù)據(jù)異常)、按鍵與接口是否卡頓或損壞。
2690
德基西瓜 ??? 11月前
為機(jī)器人和協(xié)作機(jī)器人定制傳感器組件 
但我們也知道,還涉及其他數(shù)據(jù):加速度、接觸、距離、陀螺儀、濕度、慣性、光、導(dǎo)航、位置、壓力、接近度、聲音、溫度、傾斜、電壓等。機(jī)器人技術(shù)的關(guān)鍵問(wèn)題之一是協(xié)調(diào)數(shù)據(jù),以便實(shí)現(xiàn)更有效地控制和工作。
5294 5
HBK測(cè)試與測(cè)量 ??? 3年前
20條/頁(yè) 
跳至頁(yè)

技術(shù)鄰APP
工程師必備
工程師必備
- 項(xiàng)目客服
- 培訓(xùn)客服
- 平臺(tái)客服
TOP
