



Simulink&車輛巡航控制 (2) -PID控制設計 
1.系統模型和參數下面給出了巡航控制問題的傳遞函數模型。有關推導,請參閱:MATLAB/Simulink建模-車輛巡航控制 (1)。
2809 1
AutoEuler ??? 4年前
MATLAB/Simulink建模-車輛巡航控制 (1) 
物理設置自動巡航控制是許多現代車輛中使用的反饋控制系統的一個很好的例子。 巡航控制系統的目的是在受到外部干擾(例如風或道路坡度的變化)的情況下保持恒定的車速。這是通過測量車輛速度,將其與所需或參考速度進行比較,并根據控制規律自動調節油門來實現的。我們在這里考慮一個簡單的車輛動力學模型,如上面的自由體圖 (FBD) 所示。 質量為 m 的車輛受到控制力 u 的作用。
2701 11 4
AutoEuler ??? 4年前
自動駕駛4WS車輛路徑跟蹤最優控制算法仿真 
對于自動駕駛車輛,為了增加其主動安全性,越來越多的車輛采用四輪轉向系統,所以在轉向時對規劃路徑進行精確跟蹤與四輪的協同控制是自動駕駛領域亟待解決的新的問題。 對于有四輪轉向(4WS)功能的自動駕駛特種車輛和高級乘用車,傳統的控制方法如預瞄-跟蹤模型、前饋反饋控制等只是基于系統運動學模型,很少建立精確的車輛動力學 模型,也沒有考慮車輛在高速工況下的動力學非線性約束條件。
2483
駕駛哥 ??? 4年前
從FBX到可運行虛擬車輛:一種標準化的仿真模型轉換流程 
</p><p>完成模型導入與修改后,通常就需要進行關鍵的“工程化改造”——對車輛模型進行UE導入前的預處理:</p><ul><li>整車網格控制在最多140000個三角面,模型結構重構為“底盤(Chassis)+ 四個獨立車輪(Wheels)”的仿真最小化結構,且全部為獨立對象,以保障仿真效率。其中,底盤應包含除輪胎、車牌外的所有部分。
738
康謀keymotek ??? 13天前
【技術貼】基于模型的xCU控制系統開發 
當今車輛部件和子系統與其控制系統的相互作用日益增強,控制函數的日益復雜使得各種各樣的測試開發任務呈級數增長,控制器的軟硬件開發成為車輛開發中最為關鍵的環節。AVL先進的仿真技術為控制器開發提供了一系列滿足不同車輛性能開發的仿真工具,這些工具都具備有卓越的實時仿真能力和精確的仿真精度,為實現控制器從SiL到HiL再到臺架測試系統開發的流程提供了保障。
2360 1 1
AVL先進模擬技術 ??? 3年前
以多體動力學模型為基礎的后驅車輛轟鳴性能開發 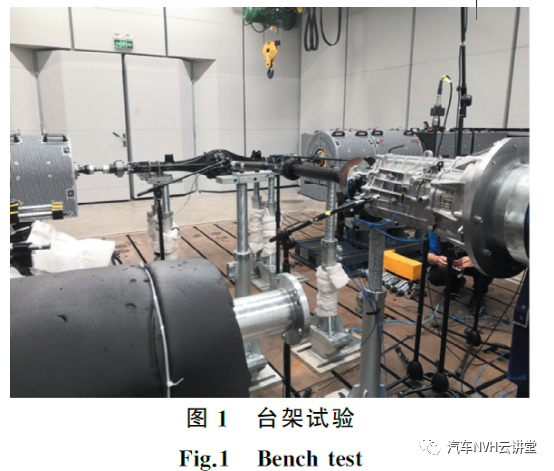
本文采用多體模型以及試驗結果相結合的方法,以某款后驅車輛的傳動系統轟鳴性能改進研究開發項目為基礎,建立傳動系統及整車的多體動力學模型,以模型為基礎研究分析后驅車輛轟鳴問題的基本機理,同時結合整車以及臺架試驗的結果,針對轟鳴問題提出相應的改善方案,以實現主要的傳動系統穩態性能前期設計能力的提升.1 后驅車輛的轟鳴性能1 .1 問題概要該款前置后驅車輛的轟鳴問題具體表現為:加速工況在發動機轉速
2672
CAE仿真學習菌 ??? 2年前
車輛動力學模型在仿真測試中的應用實踐 
2 車輛模型經緯恒潤從2004年涉足車輛虛擬仿真,無論是乘用車、商用車還是特種車輛都積累了大量的仿真經驗,具備對車輛模型拆分以及對各個模塊建模的能力,并在長期的實踐應用中不斷調整和優化模型的精度。
2241
經緯恒潤 ??? 4年前
【技術貼】使用VSM?實現車輛操穩的精準控制 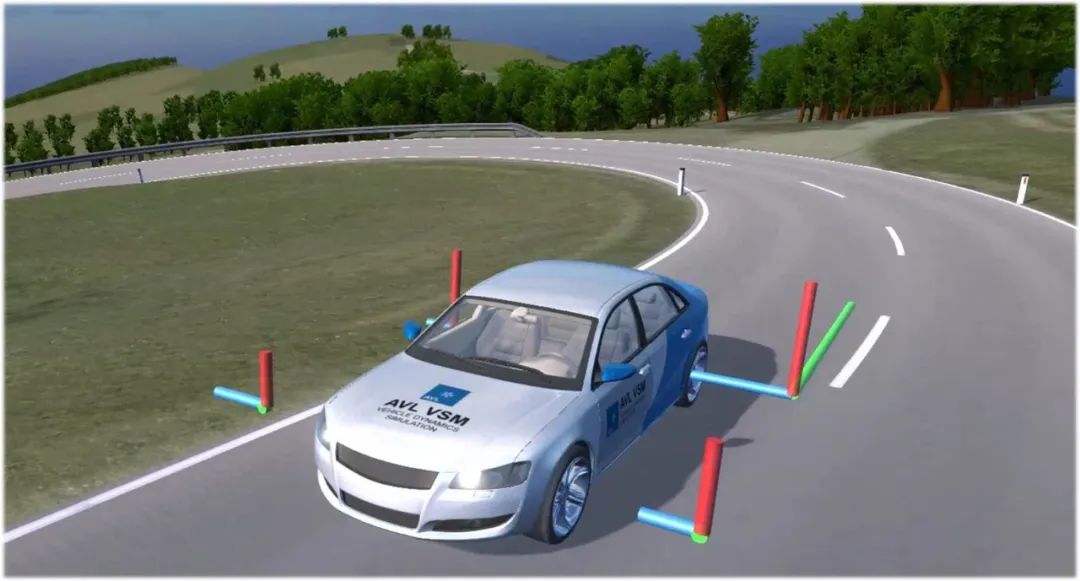
隨著汽車市場競爭的加劇,消費者在選擇汽車產品時愈來愈關注車輛的駕乘品質及行駛安全。對于車輛操穩性能的開發來講,通過對驅動輪驅動扭矩的控制來改善車輛的操縱穩定性一直是研發的熱點,其中限滑差速器和近年流行的扭矩矢量控制(Torque Vectoring)技術的使用可以在不損害車輛的駕駛樂趣的前提下有效的提高車輛的行駛穩定性。
10051 2
AVL先進模擬技術 ??? 3年前
從概念設計到虛擬驗收:實時車輛模型在數字化設計的核心作用 
VI-CarRealTime提供了統一的實時車輛動力學模型,可支持從概念設計、集成各底盤系統及控制算法、驗證到最終驗收的全開發流程。在本次網絡研討會中,參會者將深入了解實時仿真在實際應用中的價值:它將如何助力車輛實現更快的迭代速度、更高效的協作,以及更早的驗證環節。
2215 1 1
技術鄰公告 ??? 8月前
從概念設計到虛擬驗收:實時車輛模型在數字化設計的核心作用 

車輛系統日益復雜,主機廠及供應商需要一套強大的數字化核心體系 —— 既能加速創新,又能降低成本與實車測試。VI-CarRealTime提供了統一的實時車輛動力學模型,可支持從概念設計、集成各底盤系統及控制算法、驗證到最終驗收的全開發流程。在本次網絡研討會中,VI-grade的工程師將解讀行業領先的企業如何將 VI-CarRealTime 作為其數字化工具鏈的核心組件。
1346 1
VI-grade中國 ??? 8月前
3D車輛動力學模型 
三維車輛動力學模型可以引導PreScan汽車在三維道路上行駛。該模型具有與二維簡單動力學模型相同的組件,但底盤部分(車輛動力學)已被修改。其他部分保持不變。在三維車輛動力學仿真過程中,可能會有一些輕微的俯仰震動。 三維簡單動力學模型由下列部件組成,如下圖所示:發動機變速箱最終傳動比三維底盤(車輛動力學)換擋邏輯。
2904 8 5
飛馳人生5 ??? 4年前
使用 VI-CarRealTime 和 Simulink 加速車輛控制器開發 
· 控制器開發與驗證:觀看將控制模型嵌入整車仿真的實時演示,包括來自攝像頭、雷達和激光雷達的傳感器數據。· 仿真中的真實世界測試:探索如何在緊急制動場景中利用元相機傳感器數據對制動控制器進行建模,從而在虛擬環境中實現快速驗證。適用人群:從事整車性能開發、車輛動力學、底盤電子、ADAS系統開發與測試、注重用戶感受的工程師和行業研究人員
686
VI-grade中國 ??? 12月前
使用已標定的車輛動力學模型提升開發效率 
主要議題和要點:1.高級虛擬建模:探索如何創建和利用詳盡的參數化虛擬模型,包括通過在 IDIADA 的 DiM250 模擬器上進行廣泛測試和數據對比,開發出的各種車型模型(如 D-segment、SUV)。2.精密工程數字孿生技術:探討 IDIADA 的前沿測試工具,從運動學和柔性分析到輪胎力和力矩分析,精確捕捉真實世界中車輛的特性,將實體車輛精確轉化為數字孿生,革新虛擬車輛開發流程。
769
VI-grade中國 ??? 1年前
應用白皮書 | 實時車輛模型在數字化工程中的核心作用 
思百吉公司在四個主要領域開展業務——材料分析、測試與測量、在線測量儀器和精密控制,并廣泛服務于從車輛交通到航空航天、電子、能源、采礦、制藥等眾多行業。
2641
VI-grade中國 ??? 7月前
利用Adams/view搭建整車動力學模型 附ADAMS-View創建車輛輪胎路面步驟下載 
車輛側傾角和車身側傾角時會用到。下載地址:ADAMS-View創建車輛輪胎路面步驟
3561 4 2
灣灣梅 ??? 4年前
MBSE產品模型架構應用:基于模型驅動架構概念的自主水下航行器控制器的MBSE應用(下) 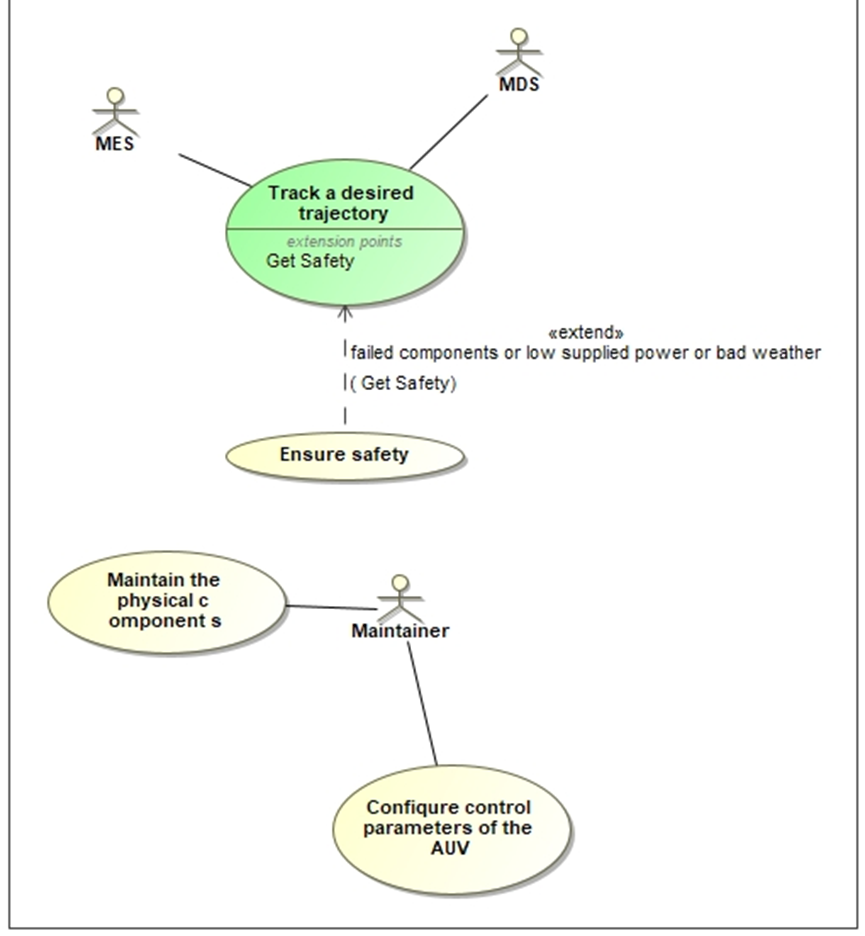
該應用模型基于MBSE方法,結合MDA概念、實時UML/SysML、EKF/UKF算法和HA系統化地實現控制器。AUV的動力學模型和控制結構首先用于結合CIM、PIM和PSM等MDA組件進行控制。在 CIM 中,用例模型使用連續行為、EKF/UKF 算法和 HA 進行定義,以密切控制需求。PIM的建立是為了通過構建實時壓縮模式來建立設計模型。
2167 1 1
一起學MBSE ??? 2年前
MBSE產品模型架構應用:基于模型驅動架構概念的自主水下航行器控制器的MBSE應用(上) 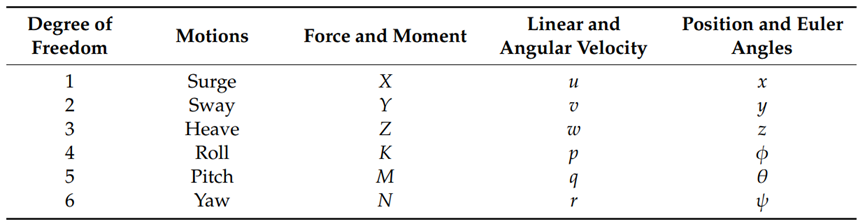
AUV的控制器設計一直是一個挑戰,因為控制器與復雜水下環境中的AUV動力學密切相關。AUV控制器可以由離散模型、連續模型及其在混合動態系統(HDS)中的相互作用組成,如混合自動機(HA)建模。傳統的控制方法通常用于實現復雜系統,以使其對控制器更有效,它們也被用于構建AUV控制器。
2565
一起學MBSE ??? 2年前
MBSE:基于模型的系統工程在航空發動機控制設計中的應用 
通過用例圖、活動圖、時序圖、狀態機圖等模型對地面起動過程進行建模分析,發現并完善了自然語言在起動控制邏輯描述方面存在的不足。最后利用狀態機進行了發動機地面起動模型仿真,對地面起動控制邏輯進行了驗證。 在利用活動圖梳理發動機地面起動功能流過程中,發現使用自然語言描述復雜系統時存在以下 2 類問題。 1)文字表述存在二義性。
5469
一起學MBSE ??? 2年前
基于射線追蹤法進行軌道車輛通過噪聲的測量和聲學模型驗證 
在捷克的Velim鐵路測試線路(位于Cerhenice的鐵路機車車輛測試設施),定期進行根據TSI-NOI [?SNEN ISO 3095:2013,聲學-鐵路應用-鐵路車輛發出的噪聲的測量]進行的認證噪聲測試。該活動的目的是在三種不同的表面(道砟、草和混凝土)上,從全向聲源測量不同距離和高度的聲壓級。 試驗設置全向聲源被用作發射白噪聲頻譜的源。
4091
聲學仿真初學者 ??? 2年前
比亞迪申請車輛熱管理系統專利,實現精準控制風扇轉速 
第一散熱器和中冷器在工作時兩者的溫度較接近,以及,第二散熱器和冷凝器在工作時兩者的溫度較接近,因此,采用第一風扇和第二風扇進行散熱操作,第一風扇和第二風扇的轉速的控制更精準。END★ 平臺聲明部分素材源自網絡,版權歸原作者所有。分享目的僅為行業信息傳遞與交流,不代表本公眾號立場和證實其真實性與否。如有不適,請聯系我們及時處理。
2063 7
熱管理博覽會 ??? 2年前
20條/頁 
 263
263 跳至頁

技術鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP
