



基于ADAMS整車16自由度模型仿真 

1、16自由度模型簡介,2、參數(shù)收集3、分析模型搭建,4、求解,5、查看頻率和解耦率,6、查看振型7 、與六自由度比較分析
90
芒特老師 ??? 6年前
基于ADAMS的點按手法運動仿真 
本文以具有最優(yōu)靈活工作空間的六自由度機(jī)器人手臂構(gòu)型為載體,建立六自由度機(jī)器人手臂的虛擬樣機(jī)模型,并在虛擬樣機(jī)中通過軌跡的規(guī)劃,使機(jī)器人手臂的末端實現(xiàn)點按手法運動軌跡。在此基礎(chǔ)上得到機(jī)器人手臂關(guān)節(jié)空間的曲線圖,為控制策略實施提供依據(jù)。
3012 2
擺渡人張 ??? 2年前
揭開多體動力學(xué)仿真的五大誤區(qū)(下篇) 
因此,用于HiL和DiL集成的實時兼容車輛動力學(xué)模型傳統(tǒng)上涉及較少的自由度(DOF),通常約為20。這種模型通常通過查找表來描述零部件的行為。雖然這些降階模型(ROM)在某些應(yīng)用中是一種有效的方法,但對實時計算而言,減少自由度的數(shù)量已不再是一個要求。 現(xiàn)成的高性能計算和工程仿真技術(shù)的進(jìn)步,使得更高保真的實時仿真成為可能,提供了更有價值的認(rèn)知。
2353 4 1
CAE仿真學(xué)習(xí)菌 ??? 2年前
案例 | 使用Adams-Marc聯(lián)合仿真模擬車輛的極端負(fù)載工況 
模型準(zhǔn)備 本研究中使用的整車模型來自相關(guān)的 BMW Adams Car 車輛動力學(xué)模型,包含約 250 個自由度和 13 個子系統(tǒng)。多體動力學(xué)模型和有限元模型之間存在 14 個交互點,在 Adams Car 模板中定義了 14 個 MARKER 和 GFORCE 與 Marc 模型進(jìn)行通信。
2734
Cruise ??? 3年前
Adams— 系統(tǒng)級多體動力學(xué)仿真平臺 
,通過與 MSC 合作開發(fā)硬件在環(huán)測試流程(HIL)實現(xiàn)了發(fā)動機(jī)和變速箱物理樣機(jī)與 Adams 實時模型的結(jié)合,實時模型源于現(xiàn)有的車輛模型,具有 150 個自由度,通過模型降階策略保留了原始模型的拓?fù)浜蛥?shù)。
2694 1
經(jīng)緯恒潤 ??? 4年前
基于Adams的磁流變阻尼器虛擬樣機(jī)仿真研究 
如何建立座椅懸架系統(tǒng)的數(shù)學(xué)模型是一項挑戰(zhàn)。懸架系統(tǒng)受到兩個關(guān)鍵的路面激勵(即隨機(jī)輸入)。利用控制方程在仿真模型中建立四分之一半主動懸架系統(tǒng)的數(shù)學(xué)模型。如下示意圖描述了座椅的多自由度模型。另外學(xué)生們發(fā)現(xiàn)可以通過應(yīng)用控制器達(dá)到所需的效果,為此他們也使用了比例積分微分(PID)控制器,幫助控制阻尼力和路面力之間的誤差,并在半主動系統(tǒng)中使用了磁流變阻尼器來降低振動。
2594 3 2
上海庭田信息科技有限公司 ??? 4年前
案例 | Adams-EDEM聯(lián)合仿真預(yù)測軟土上軍事車輛的機(jī)動性 
準(zhǔn)確地模擬地形力學(xué)是理解越野車輛機(jī)動特性的關(guān)鍵,并理解車輛和地形的變化將如何影響其動態(tài)性能。 離散元模型(DEM)將土壤表示為單個粒子,它與其它粒子之間以及所遇到的任何物理對象之間都具有完全的自由運動。DEM 是一種粒子尺度數(shù)值方法,用于對顆粒材料和許多地質(zhì)材料(包括煤,礦石,土壤,巖石,骨料,顆粒,片劑和粉末)的散料行為進(jìn)行建模。
3038 1 1
Cruise ??? 3年前
六軸碼垛機(jī)器人admas正逆運動學(xué)仿真 
基座自由度、大臂擺動自由度、小臂擺動自由度、腕部Y軸擺動自由度、腕部Z軸擺動自由度及其腕部末端X軸旋轉(zhuǎn)自由度 其導(dǎo)入過程為: (1) 機(jī)器人三維模型總體有6個部分。打開機(jī)器人的SolidWork三維模型,依次另存為6個“Parasolid(x_t)”類型的文件。
2373
余俊煒 ??? 3年前
基于DeltaD打印機(jī)的剛?cè)狁詈线\動學(xué)分析 
,結(jié)合Adams和HyGpermensh等軟件完成對模型的驗證以及傳動的誤差分析.1 Delta打印機(jī)工作概述本文主要針對Delta運動模型進(jìn)行分析,因此對三維模型進(jìn)行了適當(dāng)簡化,結(jié)構(gòu)主要由靜平臺?轉(zhuǎn)臂?擺臂以及動平臺構(gòu)成,其中靜平臺主要安裝轉(zhuǎn)臂的驅(qū)動電機(jī)以驅(qū)動轉(zhuǎn)臂完成復(fù)雜的打印動作;轉(zhuǎn)臂及擺臂主要輔助動平臺能夠多自由度完成相應(yīng)的打印動作,并對動平臺起到主要支撐作用以滿足其工作強(qiáng)度要求
4401 3
擺渡人張 ??? 2年前
基于虛擬樣機(jī)的仿真系統(tǒng)校核、驗證與確認(rèn)研究 附ADAMS 2016虛擬樣機(jī)技術(shù)從入門到精通下載 
1引言 計算機(jī)仿真的目的是利用仿真模型來模擬與推斷實際系統(tǒng)的真實性能。模型的正確性和精確度直接影響到仿真的置信度,如何保證建立的計算機(jī)仿真模型的正確性是仿真建模的一個重要問題。
3219
耐思 ??? 4年前
案例分享 | Adams轉(zhuǎn)鼓臺架2D_drum路面應(yīng)用 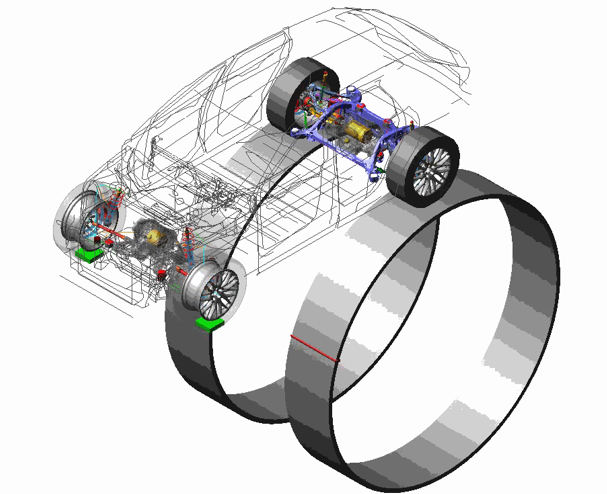
圖9 轉(zhuǎn)鼓模型展示二 上圖9為在鼓面兩端施加了止停邊界元素,同時鼓面上有傾斜45度的橫擋激勵體現(xiàn)。
4366 1 1
擺渡人張 ??? 2年前
渦旋壓縮機(jī)的虛擬建模與運動仿真
自由度可由下式確定[3]:F = 3n - ( 2pl + ph ) ( 1) 式中 n ———活動構(gòu)件數(shù)pl ———運動低副ph ———運動高副由式( 1) 可知,該機(jī)構(gòu)只有 1 個自由度。這樣就保證與滑塊 1 為一體的動渦盤作公轉(zhuǎn)平動,其圓周公轉(zhuǎn)的軌道形狀是由曲柄限定的。
2661
我愛汽輪機(jī)仿真 ??? 2年前
案例 | 運用ADAMS實時減少物理樣機(jī) 
通過執(zhí)行 DOE 來輔助模型調(diào)整,該 DOE 對模型的硬點和襯套進(jìn)行微調(diào),以捕獲五桿模型中的正確特性,例如主頻率、靜態(tài)預(yù)載、垂直速率和纏繞速率。Adams 實時模型具有150 自由度,并保留了原始模型的拓?fù)浜蛥?shù)。例如,硬點、接頭、彈簧、阻尼器和襯套等元素得以保留,并且可以進(jìn)行修改。這樣做的好處是模型可以捕獲系統(tǒng)響應(yīng)中的更高頻率的特性,并且可以快速探索不同的配置。
2179
Cruise ??? 3年前
基于Adams的汽車發(fā)動機(jī)蓋外板二次切斷廢料滑落研究 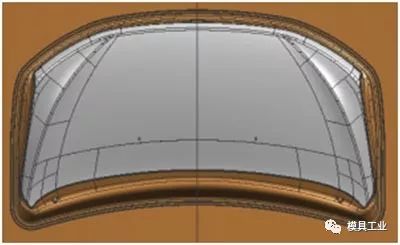
廢料能否順利滑落通過人工檢查存在一定的風(fēng)險。現(xiàn)采用Adams軟件進(jìn)行模擬,通過以下4個步驟對模型進(jìn)行廢料滑落干涉檢查、原因分析和模具修改。
2132
擺渡人張 ??? 2年前
Ansys Zemax | 確保自由曲面設(shè)計的可制造性 
本文專門介紹使用單點金剛石車床加工自由曲面的主要可制造性參數(shù),解釋了可制造性參數(shù)如何與儀器參數(shù)相關(guān)聯(lián),并展示了如何在 OpticStudio 中檢查和控制這些可制造性參數(shù)。此外,還解釋了如何處理其考察區(qū)域外的自由曲面的行為。例如,使用塑料自由曲面透鏡(Alvarez透鏡元件)等。 表面參數(shù)控制 鏡頭加工中需要進(jìn)行控制的表面參數(shù)將取決于加工方法和設(shè)備。
2622 8 4
宇熠科技 ??? 2年前
設(shè)計仿真 | Adams回調(diào)函數(shù)功能解析 
,通過滑移副與大地關(guān)聯(lián)后,確保系統(tǒng)自由度為2,再通過三個彈簧力建立相互之間力連接,下側(cè)小球為part_2,上側(cè)小球為part_3,分別在二者上施加Sforce_4和Vforce_1。
2615
海克斯康設(shè)計與仿真 ??? 1年前
刮板輸送機(jī)過彎曲段工況下力學(xué)特性研究 
所以第1節(jié)中部槽必須固定3個方向的旋轉(zhuǎn)自由度以及2個方向的移動自由度,剩余中部槽必須固定2個旋轉(zhuǎn)自由度以及1個移動自由度,在ADAMS中設(shè)置約束時,第1節(jié)中部槽采用平移副,剩下的中部槽采用平面副。
2395 8
擺渡人張 ??? 2年前
干貨|如何為你的CFD應(yīng)用選擇湍流模型?
/4關(guān)于各種湍流模型以下8個RANS湍流模型的不同之處在于它們如何處理靠近壁面的流動、求解的附加變量的個數(shù)以及這些附加變量的含義。所有這些模型都在Navier-Stokes方程中增加了一個額外的湍流渦粘度,但它們計算渦粘度的方式不同。
4471 4 3
CFD流體分析 ??? 3年前
ZEMAX技術(shù)分享:確保自由曲面設(shè)計的可制造性 
本文專門介紹使用單點金剛石車床加工自由曲面的主要可制造性參數(shù),解釋了可制造性參數(shù)如何與儀器參數(shù)相關(guān)聯(lián),并展示了如何在 OpticStudio 中檢查和控制這些可制造性參數(shù)。此外,還解釋了如何處理其考察區(qū)域外的自由曲面的行為。例如,使用塑料自由曲面透鏡(Alvarez透鏡元件)等。
2637
w**elab86_Swsp ??? 2年前
Ansys Zemax | 確保自由曲面設(shè)計的可制造性 
概要本文專門介紹使用單點金剛石車床加工自由曲面的主要可制造性參數(shù),解釋了可制造性參數(shù)如何與儀器參數(shù)相關(guān)聯(lián),并展示了如何在 OpticStudio 中檢查和控制這些可制造性參數(shù)。此外,還解釋了如何處理其考察區(qū)域外的自由曲面的行為。例如,使用塑料自由曲面透鏡(Alvarez透鏡元件)等。表面參數(shù)控制鏡頭加工中需要進(jìn)行控制的表面參數(shù)將取決于加工方法和設(shè)備。
2504
宇熠科技 ??? 8月前
20條/頁 
 43
43 跳至頁

技術(shù)鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓(xùn)客服
- 平臺客服
TOP
