



CAD如何移動坐標軸 
我們可以發現,CAD軟件的坐標系都是在左下角,默認是保持不動的,那么,我們如果想要移動坐標軸的話應該怎么操作,方法如下: 1、打開CAD軟件和圖紙,在命令欄輸入UCS命令,然后按回車鍵Enter,如圖所示 2、此時命令欄顯示坐標系設置選項,我們輸入字母M(Move,移動的意思),然后按Enter 3、此時光標上出現了坐標軸,我們把鼠標移動到想要重新放置坐標軸的地方
3154
自學土木網 ??? 1年前
認識三坐標測量機的結構形式 
一、移動橋式活動橋式結構為最常用的三坐標結構。移動橋式三坐標測量機結構簡單、緊湊,上下料有比較大的空間,運動速度快,精度高。橋架沿著兩個在水平面上相互垂直的X和Y軸的導槽并沿著這個兩方向移動,通過XYZ三個軸測量各種零部件及總成的各個點和元素的空間坐標,來評價長度、直徑、形狀誤差、位置誤差等,以完成過程控制,質量控制,逆向成型等任務。
2033
深圳市中圖儀器股份有限公司 ??? 3年前
如何在CAD中移動圖形?
在 “特性” 面板中找到 “幾何圖形” 選項組,修改 “X 坐標” 和 “Y 坐標” 的值,從而實現圖形在 X 軸和 Y 軸方向上的移動。方法四:使用動態輸入功能 動態輸入功能可以讓你在移動圖形時實時看到移動的距離和角度,步驟如下: 確保狀態欄中的 “動態輸入” 按鈕處于開啟狀態。 使用 “移動” 命令選中要移動的圖形對象。
4330
自學土木網 ??? 1年前
三坐標測量機橋式穩定結構高效檢測汽車沖壓件缺陷 
Mars系列橋式三坐標測量機以Z軸為主軸在垂直方向移動,水平梁采用德國海德漢光柵尺,具有高精度和長時間的穩定性,垂直于Y軸且被兩支柱支撐于兩端;氣浮檢測安全裝置保證Z軸不會因為斷氣而下墜,保證了測頭測座的安全。
2072
深圳市中圖儀器股份有限公司 ??? 3年前
五軸CNC模具加工你了解多少? 
看過這些結構的五軸機床,我相信我們應該明白了五軸機床什么在運動,怎樣運動。可是,這么多樣化的機床結構,在加工時究竟能展現出哪些特點呢?與傳統的三軸機床相比,又有哪些優勢呢?接下來就讓我們來看看五軸機床有哪些發光點。
2280 1
汽車零部件模具與注塑 ??? 4年前
三坐標測量機如何精確測量產品的高度差? 
三坐標測量機通過測量物體的三維坐標來實現精確的尺寸測量,不僅直觀且又方便,測量結果精度高,并且重復性好。 三坐標測量機基于三個坐標軸:X軸、Y軸和Z軸,通過控制測針在三個方向上的移動來實現測量。而在測量產品高度差時,我們主要關注的是Z軸的移動。
2139
深圳市中圖儀器股份有限公司 ??? 2年前
離心式壓縮機仿真案例 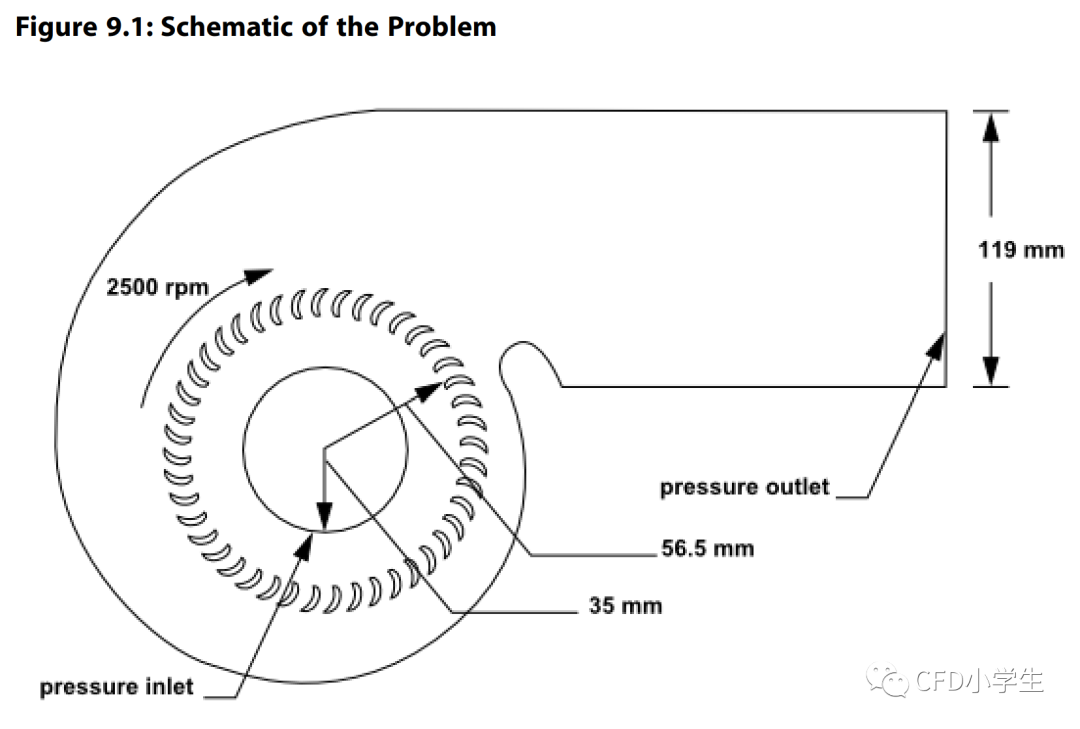
用戶也可以模擬包括多個移動參考坐標系情況,如下圖所示體中包含兩個旋轉槳葉并排(side by side),使用三個參考坐標系來進行模擬:靜止坐標系應用到槳葉外部區域和兩個分開的移動參考坐標系應用到兩個槳葉區域;三、離心式壓縮機流場仿真關鍵設置2D模型共節點網格劃分;穩態求解,流體材料默認為空氣,標準k-e湍流模型和增強型壁面函數,動域繞z軸正方向順時針旋轉,轉速為
2787 2 1
我愛汽輪機仿真 ??? 2年前
Mizar Gold高精度移動橋式三坐標測量機發布 
三、Mizar Gold如何實現高精度 相信大家在用三坐標測量探測誤差(MPEP)的時候,都會發現一個現象,垂直度補償值越多(垂直結構沒調到位,通過軟件補償垂直度),探測誤差越差? 三坐標的誤差補償,主要就是通過軟件對結構的21項系統誤差進行補償。由于三坐標機器是X/Y/Z三個平移運動軸,像直線度這種誤差比較容易通過主機移動來補償,角度誤差,會通過算法轉化成平動進行補償。
2253
深圳市中圖儀器股份有限公司 ??? 9月前
三坐標測量機結構材料對性能的影響 
四、小結 三坐標測量機的移動部件重量、移動速度和精度相互影響。測量機運動部分X軸橫梁和Z軸,目前多采用花崗巖、航空鋁合金、工業陶瓷,分別應用于不同應用場景。超高精密三坐標測量機,多使用優質花崗巖和陶瓷材料。
2306
深圳市中圖儀器股份有限公司 ??? 9月前
數控機床分類大全 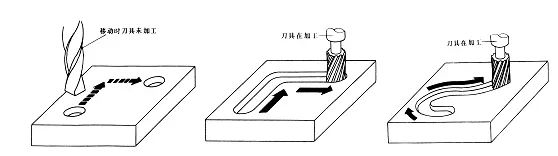
一般可根據功能和結構,按下面 4 種原則進行分類 一、按機床運動的控制軌跡分類 ⑴ 點位控制的數控機床 點位控制只要求控制機床的移動部件從一點移動到另一點的準確定位,對于點與點之間的運動軌跡的要求并不嚴格,在移動過程中不進行加工,各坐標軸之間的運動是不相關的。
4320 4
數控編程網 ??? 2年前
Maxwell繪圖 坐標系簡介 
(只改變原點,不改變X軸、Y軸、Z軸方向)
旋轉(Rotated):相對于現有坐標系,通過旋轉坐標軸,來創建新坐標系,坐標系原點不變,X軸、Y軸、Z軸方向均發生改變。
偏移和旋轉(Both):利用以上偏移和旋轉角度來創建新坐標系,坐標系原點和X軸、Y軸、Z軸同時發生變化。
4992 3 2
陳亞明 ??? 1年前
機床精度突然降低?4大診斷原則,5大診斷方法 
然后在手動方式下,將機床點動到其他任意位置,再次在手動輸入數據方式操作下運行剛才的程序段,待機床停止后,發現此時機床坐標數值顯示為“-1024.891”,同上一次執行后的數值比較相差了0.352mm.按照同樣的方法,將X軸點動移動到不同的位置,反復執行該程序段,而顯示器上顯示的數值都有所不同(不穩定)。
2230
機械學霸 ??? 4年前
Ansys Zemax | 如何圍繞空間中的任何點旋轉任何元素 
這將使我們沿著軸向前移動到透鏡的中心,也就是我們想要的旋轉軸點的位置。 第7行進行傾斜和偏心。我們使用了一個5度的傾斜 X(參見圖15)。 在第7行中應用傾斜和偏心后,應用厚度-1.5 mm。這將我們從樞軸點移動回鏡頭前面(即使鏡頭現在是傾斜和偏心)。 第8和9行在新的傾斜/偏心坐標系中構建鏡頭。第9行之后,我們就到了鏡頭的后面。 第10行使用一個坐標返回到表面7。
2635
宇熠科技 ??? 8月前
切削力量與精度完美匹配|巨高精機PB110L數控臥式鏜銑床 
機床的五個運動坐標軸分別是:工作臺橫向移動:X坐標軸主軸箱上下移動:Y坐標軸立柱縱向移動:Z坐標軸主軸軸向移動:W坐標軸工作臺回轉運動:B坐標軸 結構特點1、機床支撐大件均為米漢娜鑄件,經二次時效處理,精度保持性持久。2、主軸:雙層嵌套式主軸,即銑軸和鏜軸,主軸軸承采用進口成組軸承,并經過支撐跨距的最優化設計,使主軸結構精度高和剛性好。
2559
GUGAO巨高 ??? 2年前
巨高精機PB110L數控臥式鏜銑床——切削力量與精度完美匹配 
總體布局機床呈倒“T”結構布局,由后床身、立柱及滑座、側掛臥軸主軸箱及后尾筒和前置橫向移動回轉工作臺等幾個大部件組成。機床的五個運動坐標軸分別是:工作臺橫向移動:X坐標軸主軸箱上下移動:Y坐標軸立柱縱向移動:Z坐標軸主軸軸向移動:W坐標軸工作臺回轉運動:B坐標軸結構特點1、機床支撐大件均為米漢娜鑄件,經二次時效處理,精度保持性持久。
2305
GUGAO巨高 ??? 2年前
三自由度機械臂運動學分析+仿真 
建立坐標系 1正運動學分析 采用標準的D-h法進行機械腿模型分析: 將連桿坐標系的原點建立在連桿的關節連桿末端。 一、建立D-H連桿坐標系的原則 1.Z,軸沿關節軸i+1的軸向。 2.原點O為Zi.,與Zi軸的交點或其公垂線與關節軸Zi的交點。3.Xi軸沿Zi與Zi軸的公垂線方向,由關節軸i指向關節軸i+1。
3993
余俊煒 ??? 2年前
Ansys Zemax|為離軸反射鏡中增加相位表面 
此外,設置了兩個坐標斷點:其中一個用于將主鏡向下移動,以便調整光路;另一個用于使像面與主光線對準。 圖 1:離軸拋物面設計示例的布局圖,后焦距為 -187.5 mm。 圖 2:用于 OAP 設計的鏡頭數據編輯器。
1959
宇熠科技 ??? 6月前
如何實現局部坐標系跟隨物體一起轉動?
有兩個剛體,一根軸,一個底座,均為軸對稱結構,Y方向為對稱軸 我需要底座首先繞Z軸旋轉一定角度,然后底座和軸各自沿著自己移動后的對稱軸自轉。 我分別設置了局部坐標系,可是自轉時卻是繞著全局坐標系的Y反向旋轉的,請問如何解決呢?
2204 1
齊沂 ??? 3年前
三坐標誤差補償技術:陶瓷橫梁如何讓三坐標少修正,更精準? 
而傳統三坐標測量機長期被“補償思維”主導,主要依賴21項系統誤差的軟件補償,其中角度誤差由于X/Y/Z三軸的角度偏差無法通過機械結構完全消除,始終干擾最終結果: 傳統三坐標的精度本質是機械精度+補償算法,當設備本身的角度誤差(如X軸與Y軸的垂直度偏差)超過2角秒,測量軟件每增加一份補償,就會放大一份非物理真實的修正量。
2382
深圳市中圖儀器股份有限公司 ??? 8月前
塔架環境下運載火箭天線耦合輻射仿真研究 
在FEKO中的建筑坐標系XYZ定義如下:坐標原點:箭體軸心與塔架外立面變窄處平面交界點;Y軸:原點指向垂直于遠離固定平臺的方向;Z軸:原點指向箭體軸心向上;X軸:由右手法則確定。同時,建立天線坐標系UVN,方向與建筑坐標系一致。方便起見,下文中統一在XYZ坐標系下表示天線位置和電場強度。
4025 3 1
航模無人機干貨分享 ??? 2年前
20條/頁 
 15
15 跳至頁

技術鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP
