



《基于 ABAQUS 的桁架機器人模態(tài)分析》 
摘 要:為了確保桁架機器人在設(shè)計階段滿足模態(tài)性能要求,在設(shè)計前期需要對桁架機器人進(jìn)行模態(tài)分析研究。本文首先根據(jù)物流工廠中的實際需求,確定桁架機器人的整體結(jié)構(gòu),并建立三維模型;然后基于 ABAQUS 有限元仿真平臺提取桁架機器人的前十階固有頻率以及振型;最后通過模態(tài)試驗方法對桁架機器人的實體縮小模型進(jìn)行分析。
3091 2
CAEer吳皓 ??? 2年前
[機器人學(xué)習(xí)]-樹莓派6R機械臂運動學(xué)分析 ![[機器人學(xué)習(xí)]-樹莓派6R機械臂運動學(xué)分析](https://img.jishulink.com/msimage/202212/724f9dd4ed1679d29341729d06ff291c.png?image_process=resize,fw_294,fh_172,)
1正運動學(xué)分析采用標(biāo)準(zhǔn)的D-h法進(jìn)行機械腿模型分析:D-h表如下(2)通過(1)求解出機器人各位姿變換矩陣后,求解機器人手臂變換矩陣。通過matlab 計算,寫出機器人末端位置。
2561 1
余俊煒 ??? 3年前
機器人行業(yè)工程仿真分析解決方案 
6、控制系統(tǒng)特性分析及優(yōu)化 液壓系統(tǒng)和氣動系統(tǒng)是機器人產(chǎn)品主要的運動控制系統(tǒng),直接控制著機器人產(chǎn)品的運動。
2551
Cruise ??? 4年前
全面分析特斯拉機器人“超算”芯片(超越GPGPU?) 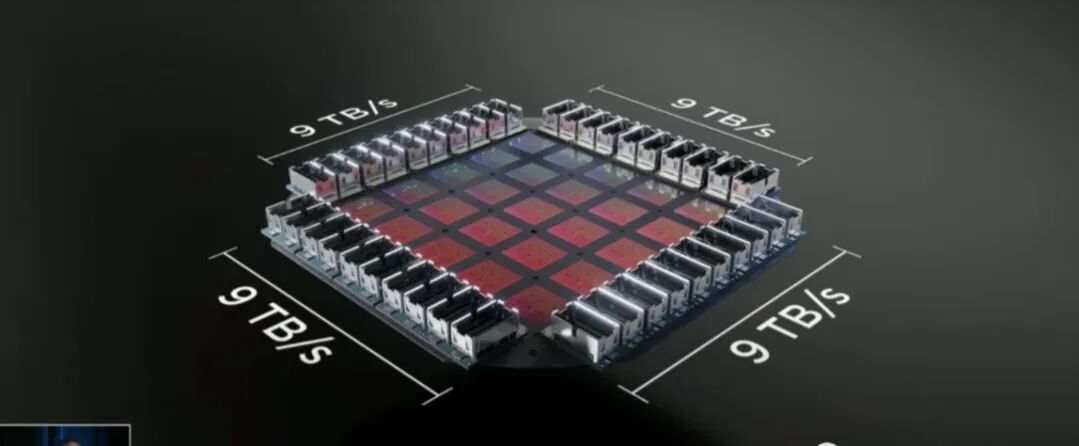
本文將深入特斯拉D1處理器的整體架構(gòu)和設(shè)計哲學(xué),并結(jié)合特斯拉的專利對其進(jìn)行深度分析,包括矩陣計算單元、指令集、Chiplet封裝、編譯生態(tài)等。 2022年9月最后一天,特斯拉的人工智能日,特斯拉“擎天柱”機器人正式登臺亮相。按照特斯拉工程師的說法,2022 年人工智能日是特斯拉機器人第一次在沒有任何外部支持的情況下被“放出“。“他“步姿端莊,大方向場上觀眾打招呼。
2736 1
牛頓家的計算機 ??? 3年前
基于Adams的六足直立式步行機器人運動仿真分析 
基于Adams的六足直立式步行機器人運動仿真分析張久雷(廣東職業(yè)技術(shù)學(xué)院 機電工程系, 廣東 佛山 528041)摘要 分析了一種以雙電機為驅(qū)動力、以曲柄連桿機構(gòu)為傳動系統(tǒng)的六足直立式步行機器人的工作原理。
4178 7 8
仿真客 ??? 3年前
基于comsol的水下機器人水流中受力分析 
</p><p>本模型是構(gòu)建了一款水下機器人的結(jié)構(gòu)模型,分析在水流中的應(yīng)力分布。</p><p><img src="https://img.jishulink.com/images/202205/u6kGawsNvBbQnupTaLPvrV.png"></p><p><strong>模型文件在文中開頭,需要的可以下載,加密文件如需密碼可以私信我。謝謝。</strong></p>
3891 90
琳泓comsol ??? 6年前
基于Hypermesh和OptiStruct/Nastran/Ansys行走機器人剛?cè)狁詈?em>分析 

行走機器人剛?cè)狁詈?em>分析Hypermesh和OptiStruct行走機器人右小腿柔性體的生成;Hypermesh和Nastran行走機器人右小腿柔性體的生成;Hypermesh和Ansys行走機器人左大腿柔性體的生成;行走機器人剛?cè)狁詈虾筇幚恚毁徺I后,私信發(fā)模型且都可加私信答疑。
49 4
Crisby_Vectory_TrHo ??? 6年前
RecurDyn成功案例:基于仿真設(shè)計的多關(guān)節(jié)機器人 
此外,通過RecurDyn的柔性體建模技術(shù),可以快速、高效地了解機器人各種姿態(tài)下的振動特性,降低了研發(fā)成本。
2608 1 1
杭州擬創(chuàng)(RecurDyn原廠) ??? 3年前
RecurDyn成功案例:基于仿真設(shè)計的多關(guān)節(jié)機器人 
此外,通過RecurDyn的柔性體建模技術(shù),可以快速、高效地了解機器人各種姿態(tài)下的振動特性,降低了研發(fā)成本。
2529
杭州擬創(chuàng)(RecurDyn原廠) ??? 2年前
2024年RecurDyn優(yōu)秀案例競賽作品分享:核探測機器人底盤設(shè)計與越障性能仿真驗證 
其仿真過程如下圖3-8 所示: 經(jīng)過多次仿真結(jié)果對比得到機器人所能翻越凸臺最高高度為100mm,所需單側(cè)驅(qū)動扭矩為39N.m左右,根據(jù)前述計算分析過程,所選驅(qū)動電機滿足該要求。仿真過程中機器人姿態(tài)角度變化范圍與所設(shè)置凸臺高度變化范圍一致,機器人在翻越凸臺過程中保持了較好的穩(wěn)定性。
2556
杭州擬創(chuàng)(RecurDyn原廠) ??? 1年前
RecurDyn機器人仿真應(yīng)用及核心技術(shù)路線詳解 
,其目標(biāo)是在已知機器人末端執(zhí)行器目標(biāo)位置(及姿態(tài))的前提下,反解出各關(guān)節(jié)所需達(dá)到的角度(或位移)。
2383 1
杭州擬創(chuàng)(RecurDyn原廠) ??? 4月前
終結(jié)“續(xù)航焦慮”:魯渝能源揭秘人形機器人無線充電的破局之道 
人形機器人,作為機器人技術(shù)的集大成者,正從實驗室走向商業(yè)應(yīng)用的前沿。然而,其復(fù)雜的動作與高自由度對能源系統(tǒng)提出了極致挑戰(zhàn),“續(xù)航焦慮”成為制約其長時間、常態(tài)化工作的關(guān)鍵因素。魯渝能源,致力于為各類機器人提供靈活的無線能源解決方案,正以其創(chuàng)新的無線充電技術(shù),為人形機器人的持續(xù)進(jìn)化“充電賦能”。人形機器人能源供給的獨特挑戰(zhàn)人形機器人模仿人類形態(tài),活動范圍大、姿態(tài)多變,且對自重極為敏感。
2185
魯渝能源無線充電 ??? 6月前
使用激光跟蹤儀提升碼垛機器人精度 
其中GTS激光跟蹤儀搭配iTracker六維姿態(tài)傳感器(圖3),可實現(xiàn)對目標(biāo)位置和姿態(tài)的動態(tài)跟蹤及高精度測量,可同時實現(xiàn)對工業(yè)機器人位置精度和姿態(tài)精度的監(jiān)控和測量,完美契合工業(yè)機器人性能指標(biāo)的測量需求。
2328
深圳市中圖儀器股份有限公司 ??? 1年前
小鵬機器人“貓步”刷屏背后:一場自研芯片到仿生軀體的技術(shù)豪賭 
近日,小鵬發(fā)布的人形機器人IRON。其高度擬人化的外觀設(shè)計,流暢的“貓步”姿態(tài),一直備受全網(wǎng)討論。據(jù)介紹,IRON 擁有全新的「類人骨骼結(jié)構(gòu)」、仿生肌肉系統(tǒng)以及「全覆蓋柔性皮膚」,機械感大幅降低,觀感更接近真實的人類。關(guān)鍵技術(shù)解析1、“大腦”小鵬IRON:全棧自研的“擬腦”架構(gòu)核心技術(shù):其核心是基于3顆自研圖靈AI芯片的中央計算單元,算力高達(dá)2250 TOPS。
2107
數(shù)字中國產(chǎn)業(yè)展會 ??? 6月前
魯渝能源四足機器人無線充電方案,量身定制,告別“趴窩”焦慮 
四足機器人的作業(yè)環(huán)境越惡劣,傳統(tǒng)充電方式的短板暴露得越徹底。 痛點三:停靠精度與晃動誤差四足機器人在完成作業(yè)任務(wù)后,自動行走到充電區(qū)域。然而,不同于輪式AGV的平穩(wěn)停靠,四足機器人站立時存在自然的晃動和姿態(tài)變化。機械臂或連桿式對接需要毫米級的重復(fù)定位精度,而四足機器人的機械結(jié)構(gòu)特性注定了它難以做到這一點。對接失敗、反復(fù)嘗試、充電中斷,成為家常便飯。
740
魯渝能源無線充電 ??? 18天前
展商推薦|1秒起身“鹿明機器人”重新定義人形機器人 
1秒起身——刷新行業(yè)敏捷極限在行業(yè)內(nèi),倒地后的快速恢復(fù)是最能體現(xiàn)機器人控制算法和硬件實力的動作之一。大多數(shù)機器人因動力系統(tǒng)、平衡控制、姿態(tài)規(guī)劃等限制,需要數(shù)秒到十幾秒才能起身。而鹿明機器人通過 高性能關(guān)節(jié)模組、優(yōu)化控制算法以及實時感知閉環(huán)系統(tǒng),將起身時間壓縮至 1秒,成為業(yè)內(nèi)少有的技術(shù)突破。
2286
數(shù)字中國產(chǎn)業(yè)展會 ??? 7月前
工業(yè)機器人精度測量方案-激光跟蹤儀 
RobotMaster軟件還可以按照《ISO 9283工業(yè)機器人性能規(guī)范及其實驗方法》對機器人在位置、姿態(tài)、軌跡等方面進(jìn)行性能檢測,檢測內(nèi)容包括14大項:1.機器人位姿準(zhǔn)確度和位姿重復(fù)性2.多方向位姿準(zhǔn)確度變動3.距離準(zhǔn)確度和距離重復(fù)性4.位置穩(wěn)定時間5.位置超調(diào)量6.位姿特性偏移7.互換性8.軌跡準(zhǔn)確度和軌跡重復(fù)性9.重復(fù)定向軌跡準(zhǔn)確度10
2819
深圳市中圖儀器股份有限公司 ??? 3年前
【機器人仿真案例】基于RecurDyn Durability預(yù)測機器人夾爪疲勞壽命 
案例概要產(chǎn)品:機器人夾爪分析目標(biāo):預(yù)測夾爪機構(gòu)薄弱部位的疲勞壽命半導(dǎo)體制造工藝需要處理大批量作業(yè)任務(wù),這推動了專用機器人及各類自動化技術(shù)的發(fā)展,其中包括自主移動機器人(AMR)。半導(dǎo)體專用機器人夾爪的一個核心特性是:以極小接觸面積抓取物件,從而滿足潔凈室的潔凈度要求。因此,夾爪在結(jié)構(gòu)上受到諸多限制,同時相較于其機械結(jié)構(gòu)尺寸,還需承載相對較重的物件。
1430
杭州擬創(chuàng)(RecurDyn原廠) ??? 1月前
軟體機器人超彈性材料本構(gòu)賦予的兩種實現(xiàn)方式 
本文將圍繞這兩種方式,結(jié)合 Abaqus 仿真全流程(建模、參數(shù)設(shè)置、分析步、相互作用等),詳細(xì)闡述實現(xiàn)邏輯、操作要點及結(jié)果對比,為軟體機器人的超彈性仿真提供可復(fù)現(xiàn)的技術(shù)方案。
3319 18 8
Abaqus_JUN ??? 7月前
Adams管路機器人仿真 
1.模型的建立 管路機器人主要是根據(jù)管路管徑的變化,調(diào)整支腿的姿態(tài),使支腿時刻緊貼管內(nèi)壁,然后實現(xiàn)前移。
4330 1
擺渡人張 ??? 2年前
20條/頁 
 46
46 跳至頁

技術(shù)鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓(xùn)客服
- 平臺客服
TOP
