



設(shè)計仿真 | Actran聲源識別方法連載(二):薄膜模態(tài)表面振動識別 
上期文章我們介紹了基于振動測試結(jié)果反推結(jié)構(gòu)載荷,點擊可查看《Actran聲源識別方法連載(一):結(jié)構(gòu)載荷識別》。這一期,我們將介紹第二種聲源識別方法:基于噪聲測試的薄膜模態(tài)表面振動識別方法。通過實際工作狀態(tài)下的聲音測量數(shù)據(jù)結(jié)合聲源結(jié)構(gòu)表面的空氣薄膜模態(tài),反推出各階薄膜模態(tài)的參與因子,從而了解聲源表面的真實振動情況。
2466
海克斯康設(shè)計與仿真 ??? 1年前
科研分享 | 單樁基礎(chǔ)海上風(fēng)力發(fā)電機的模態(tài)阻尼識別 
可以清楚地從0.35 Hz左右的第一個FA模式識別出主峰。我們還可以識別一些頻率高于1 Hz的較小峰值。這些峰值與較高的風(fēng)塔模態(tài)和葉片模態(tài)有關(guān)。我們還可以觀察到主頻以下的一些小峰值。
2422 2 1
CELab-001 ??? 4年前
03-汽車振動系統(tǒng)模態(tài)識別方法及應(yīng)用 

1、汽車模態(tài)分析及識別原理簡介
2、汽車模態(tài)傳統(tǒng)的識別方法流程及難點
3、基于四點法的車身彎曲及扭轉(zhuǎn)模態(tài)識別方法流程及難點
4、基于十點法的車身彎曲及扭轉(zhuǎn)模態(tài)識別方法流程及難點
5、基于二十四點法的車身彎曲模態(tài)識別方法流程及難點
6、汽車子系統(tǒng)模態(tài)識別方法流程及難點
299 1
CAE之家 ??? 1年前
基于模態(tài)提升發(fā)動機NVH優(yōu)化研究 
通過輸入-輸出信號的傅里葉變換計算得到實測的FRF離散值,再用最小二乘法進(jìn)行參數(shù)識別。2.缸體模態(tài)試驗模態(tài)試驗時測點信號要有高的信噪比,因此結(jié)合仿真分析結(jié)果,測試點盡可能遠(yuǎn)離模態(tài)節(jié)點,本次試驗建立了32個測量點,如圖2所示。測量時將缸體放在充氣輪胎上。試驗采用移動力錘,單點激勵多點激勵輸出的方式進(jìn)行。
5333 6 1
汽車公社 ??? 2年前
基于隨機子空間法和聚類算法的模態(tài)參數(shù)識別 
復(fù)現(xiàn)了論文中的五自由度動力系統(tǒng)模態(tài)分析和時域響應(yīng)計算,根據(jù)時域計算結(jié)果進(jìn)行了隨機子空間模態(tài)參數(shù)識別,使用聚類算法提高了識別精度。
637
happysunday123 ??? 11月前
振動基礎(chǔ)知識:實驗模態(tài)分析的基本流程 
3 模態(tài)參數(shù)估計 這一步是利用測量得到的頻響函數(shù)或時間歷程來估計模態(tài)參數(shù),包括:固有頻率,模態(tài)振型,模態(tài)阻尼,模態(tài)剛度和模態(tài)質(zhì)量等。 模態(tài)分析的實質(zhì)是曲線擬合的過程,根據(jù)測量的數(shù)據(jù)(頻率響應(yīng)函數(shù),FRF),通過曲線擬合獲得模態(tài)參數(shù)。獲得各階模態(tài)參數(shù)之后,又可以根據(jù)這些參數(shù)綜合出各個測點的FRF。
2166
Bjhq2021 ??? 4年前
350兆瓦汽輪機繞組模態(tài)試驗與故障診斷 
漢航NTS.LAB模態(tài)試驗平臺支持錘擊法、激振器法、OMA工作模態(tài)等模態(tài)測試方法,依據(jù)測量到的FRF數(shù)據(jù)、時域或PSD數(shù)據(jù),使用相應(yīng)的識別方法獲取發(fā)電機端部繞組的模態(tài)參數(shù)(頻率、阻尼、振型、質(zhì)量、剛度)。
2209
漢航 ??? 2年前
飛行器尾舵純模態(tài)試驗 
如圖7所示,經(jīng)過多次平均后,仍無法從頻率響應(yīng)函數(shù)中識別出關(guān)心的低階模態(tài)。 圖7 FRF與相干分析 激振器法相較于錘擊法,雖然激勵的能量可控制,由于尾舵結(jié)構(gòu)的間隙、摩擦等非線性因素較強的影響,往往會識別出虛假模態(tài),且無法繪制力-頻曲線,無法為顫振計算提供可靠的數(shù)據(jù)結(jié)果。
2165 1
漢航 ??? 2年前
ANSYS Mechanical 2022 新功能更新:求解器、NVH、疲勞 
二、NVH工具箱MAC 計算器支持模態(tài)選擇與重新排序、識別匹配模態(tài)、UNV節(jié)點的節(jié)點選擇和位置調(diào)整、UNV模型方向(坐標(biāo)系、剛體變換或3節(jié)點對齊)等等。應(yīng)力/應(yīng)變恢復(fù)應(yīng)力/應(yīng)變恢復(fù)根據(jù)模態(tài)坐標(biāo)文件 (MCF) 從模態(tài)分析得到的模態(tài)疊加計算彈性應(yīng)力/應(yīng)變。
2470
上海安世亞太 ??? 4年前
通過BK Connect將您的數(shù)據(jù)整合在一起 
重要更新:BK Connect 掃頻正弦分析 8406-A 識別和分析結(jié)構(gòu)固有頻率后處理分析結(jié)構(gòu)在受控正弦激勵下的響應(yīng),結(jié)果包括總值振動級、諧波分量、頻響函數(shù)和總諧波失真BK Connect結(jié)構(gòu)動力學(xué)軟件模態(tài)參數(shù)識別得到的留數(shù)現(xiàn)在可以保存到模態(tài)表中,并用于頻響函數(shù)合成模態(tài)參數(shù)識別添加了Condensation優(yōu)化參數(shù),以優(yōu)化穩(wěn)態(tài)圖的一致性和分辨率
3927 1
HBK聲學(xué)與振動 ??? 2年前
某器件電路板的模型修正 
圖1 模態(tài)測試的試驗件及支撐狀態(tài)圖2 NTS.LAB DSA數(shù)據(jù)采集軟件界面 試驗完成后,將測得頻響函數(shù)發(fā)送至NTS.LAB Analysis中,采用試驗模態(tài)分析模塊進(jìn)行模態(tài)參數(shù)識別,如圖3所示,識別出電路板的前10階模態(tài)參數(shù)列表如表1所示,對應(yīng)的振型如圖4所示:圖3 NTS.LAB Analysis參數(shù)識別過程中的極點穩(wěn)態(tài)圖表 1 識別出的模態(tài)參數(shù)
2614
漢航 ??? 11月前
設(shè)計仿真 | Actran聲源識別方法連載(一):結(jié)構(gòu)載荷識別 
表面振動識別方式可以有四種實現(xiàn)方法:(1)在已有結(jié)構(gòu)有限元模型的情況下,通過振動測量數(shù)據(jù)反推出結(jié)構(gòu)載荷,從而獲得與真實工作狀態(tài)一致的結(jié)構(gòu)振動模型。(2)在已有結(jié)構(gòu)模態(tài)數(shù)據(jù)的情況下,通過振動測量數(shù)據(jù)反推出結(jié)構(gòu)模態(tài)的參與因子,進(jìn)而得到實際工作狀態(tài)下的結(jié)構(gòu)振動響應(yīng)。
2070
海克斯康設(shè)計與仿真 ??? 1年前
Ansys 案例研究 | 電路板的模態(tài)分析 
識別共振風(fēng)險:通過模態(tài)結(jié)果,明確 PCB 的敏感頻率區(qū)間,為評估其與外部環(huán)境振動(如風(fēng)扇、發(fā)動機激勵)發(fā)生共振的可能性提供直接依據(jù)。 定位機械薄弱點:可視化分析各階振型,識別在振動中位移最大或應(yīng)變能集中的區(qū)域(通常為大型器件、板邊或懸空部位),這些位置是潛在的焊點疲勞與元件損壞風(fēng)險點。
2343
JXKJ ??? 4月前
研究推薦 | 軸向柱塞泵殼體降噪?yún)^(qū)域識別 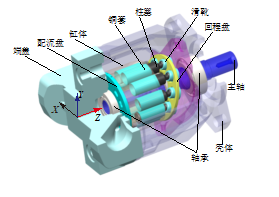
本課題針對軸向柱塞泵殼體降噪?yún)^(qū)域識別難題,建立了液壓-多體動力學(xué)耦合模型以求解結(jié)構(gòu)噪聲激振力,建立了考慮軸向柱塞泵內(nèi)部多組件耦合關(guān)系的有限元/邊界元振聲模型,基于振聲模型開展模態(tài)和板面聲學(xué)貢獻(xiàn)量分析,精確識別了柱塞泵殼體降噪?yún)^(qū)域,為柱塞泵殼體優(yōu)化設(shè)計奠定技術(shù)基礎(chǔ)。
2599
聲學(xué)工程師小吳 ??? 2年前
泵的振動問題分析 
對后者,固有頻率繪圖作為近似圓,使用奈奎斯特圖接近的振型更容易識別和分開。 實驗模態(tài)分析(EMA)是一個振動測試方法,它對泵施加已知的力(在測試范圍所有頻率上恒定),泵由這個力單獨產(chǎn)生的振動響應(yīng)被觀察和分析。
3006 1
冶金焦化 ??? 4年前
白車身試驗模態(tài)總結(jié)報告 
(4)若測點布置于斜面上,需要對測點的X、Y、Z方向進(jìn)行歐拉變換,否則會影響模態(tài)振型的識別結(jié)果。(5)為了避免無法識別某一階的模態(tài)參數(shù),測點應(yīng)避免選擇的各階振型的節(jié)點上。 3.2 建立幾何模型當(dāng)將整個車身建成一個組件時,在模態(tài)軟件中輸入一定數(shù)量(如30個)的測點坐標(biāo)之后,先進(jìn)行連線操作,不然輸入的測點過多,會導(dǎo)致分不清哪些點需要與哪些點相連。太多的測點會引起視角上的混亂。
2757
CAE知識手札 ??? 1年前
BK Connect 2024.0版本發(fā)布 
通過在單個掃頻點激勵結(jié)構(gòu),掃描正弦測量使您能夠識別和分析固有頻率。</li><li>在模態(tài)分析任務(wù)中,使用基于測試的查看器,驗證和對比結(jié)果。
3287 1
HBK聲學(xué)與振動 ??? 1年前
基于深度學(xué)習(xí)的機器人目標(biāo)識別和跟蹤 
同時,根據(jù)氣孔物體的特點,對16倍和32倍的下采樣層進(jìn)行了簡化,提高了識別效率。實驗表明該方法快速可靠。Hui Zeng等學(xué)者對非結(jié)構(gòu)化網(wǎng)絡(luò)物理系統(tǒng)環(huán)境交際機器人多模態(tài)感知模型進(jìn)行構(gòu)建。改進(jìn)的PSOBT-SVM 在不改變SVM分類器數(shù)量的情況下優(yōu)化了分類精度,并證明了其在多模態(tài)觸覺信號分類方面的準(zhǔn)確性。3目標(biāo)識別和跟蹤技術(shù)運動物體檢測是識別給定區(qū)域或區(qū)域中物體的物理運動的任務(wù)。
2278
DSJ123 ??? 3年前
軌道交通設(shè)備設(shè)計與維護(hù)——軌道交通緩沖器模態(tài)分析仿真APP 
該仿真APP適用于地鐵系統(tǒng)設(shè)計工程師、結(jié)構(gòu)分析師及緩沖器制造商,通過建立緩沖器的三維模型,用戶可以定義材料屬性、邊界條件、結(jié)構(gòu)參數(shù)等,進(jìn)行模態(tài)分析,得到緩沖器的多階固有頻率和振型。通過分析振型,用戶可以清晰地了解緩沖器在不同頻率下的變形模式,識別出可能導(dǎo)致共振的區(qū)域,從而進(jìn)行優(yōu)化設(shè)計,確保緩沖器能夠在實際應(yīng)用中有效緩解沖擊力。
2583 35 9
仿真APP ??? 1年前
旋轉(zhuǎn)機械階次模態(tài)分析技術(shù) 
但是旋轉(zhuǎn)機械在運行狀態(tài)下所受的激勵以頻率為轉(zhuǎn)頻和轉(zhuǎn)頻倍頻的諧波激勵為主,白噪聲激勵的假設(shè)不再成立,OMA方法在旋轉(zhuǎn)機械的模態(tài)參數(shù)識別中受到了限制。PSD或HPSD中的諧波頻率可能會被錯誤地識別為共振頻率,產(chǎn)生虛假模態(tài),也稱作“諧波模態(tài)”。
3080
漢航 ??? 2年前
20條/頁 
 13
13 跳至頁

技術(shù)鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓(xùn)客服
- 平臺客服
TOP
