



經(jīng)典案例懸臂梁受力有限元理論與程序設(shè)計_《數(shù)值計算與程序設(shè)計》系列課程之三 
本課以經(jīng)典案例——懸臂梁受力分析,來作為本課的核心內(nèi)容。同樣,以從基礎(chǔ)理論出發(fā),到程序設(shè)計思路,再到最終的代碼以及誤差分析的路線,一步一步講解有限元方法在靜力學中的應(yīng)用。 主要內(nèi)容包括四個部分:1案例介紹;2基本理論;3程序設(shè)計;4與準確解和ANSYS軟件求解結(jié)果的對比。 第一部分講述了問題的背景,材料參數(shù)、幾何形狀、邊界條件等。
3685 23 12
祝小松 ??? 5年前
ANSYS 經(jīng)典界面繪圖控制小技巧 附ANSYS二次開發(fā)手冊下載 
接下來將簡單介紹 ANSYS 經(jīng)典繪圖控制的幾個小技巧。黑色背景改成白色上圖是 ANSYS 經(jīng)典界面的默認布局,黑色背景對于建模操作還算友好,但若是將一張黑乎乎的圖片插入白色背景的 PPT 中,會顯得比較突兀。
2406
西瓜太郎. ??? 3年前
一文梳理整車域控制器的經(jīng)典五域 
電子電氣(EEA)架構(gòu)技術(shù)戰(zhàn)略圖核心:以博世經(jīng)典的五域分類拆分整車為動力域(安全)、底盤域(車輛運動)、座艙域/智能信息域(娛樂信息)、自動駕駛域(輔助駕駛)和車身域(車身電子),這五大域控制模塊較為完備的集成了L3及以上級別自動駕駛車輛的所有控制功能。
2540
駕駛哥 ??? 3年前
經(jīng)典層壓板理論及基于ABD矩陣的建模方法(“以漁計劃”第一季第5部分) 

課程說明:該課程為“以漁計劃”第一季中的部分內(nèi)容,本課程主要講解經(jīng)典層壓板理論、ABD矩陣計算方法、ABD計算程序使用方法以及Abaqus中基于ABD矩陣的建模方法。聲明:為保護版權(quán),該課程不提供電子版講義下載,配套模型可在課程附件中下載。視頻課程相關(guān)問題請在課程下方留言反饋。購買視頻課程可申請加入復(fù)合材料力學QQ交流群。
984 15
復(fù)合材料力學-君莫 ??? 6年前
《經(jīng)典力學》札記 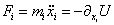
01經(jīng)典力學的重要性經(jīng)典力學是理論力學或者理論物理的第一門課,學好經(jīng)典力學是學好物理的關(guān)鍵。理論力學的思想——最小作用量原理等,會用在后續(xù)幾乎所有的物理課程中。這門課有一條非常清晰的主線,即這個原理,理清這根脈絡(luò),是學好理論力學的根本。如果學好了,這門課的所有內(nèi)容可以寫在半頁紙上。
3023 21 20
仿真客 ??? 3年前
經(jīng)典力學算不準的真相 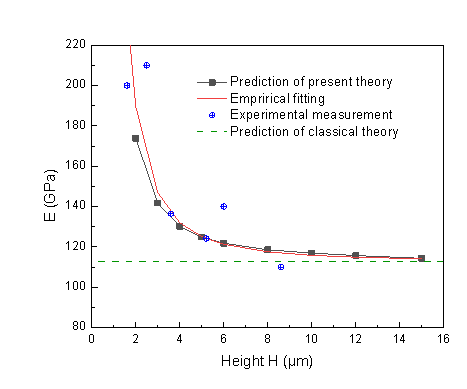
四、數(shù)值實現(xiàn):增廣拉格朗日法的巧妙之處高階理論的最大障礙是求解困難。控制方程包含四階甚至六階微分算子,傳統(tǒng)有限元需要 或 連續(xù)性的形函數(shù)(極其復(fù)雜)。
2292
積微科技 ??? 3月前
無人機集群如何從理論“飛進”現(xiàn)實 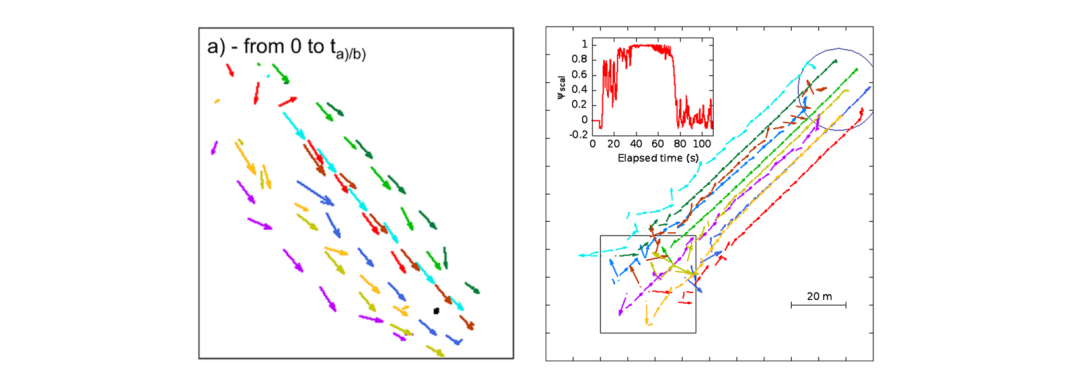
為了盡可能模擬實際無人機飛行時的狀態(tài),算法首先以Reynolds經(jīng)典三定律:短距離排斥、中距離速度對齊,遠距離吸引為基本控制思路,增加‘粘性摩擦項’(該項對整體算法的控制效果非常重要,有興趣的同學可在原文深入了解),同時考慮現(xiàn)實與理論的差距和可能出現(xiàn)的不確定性,將無人機慣性、內(nèi)/外噪聲、傳感器刷新頻率、通信范圍、時延等諸多現(xiàn)實因素加入到算法設(shè)計中,同時引入‘shill’-agent來完成有界環(huán)境下和存在障礙物環(huán)境中的控制
2501
看航空 ??? 3年前
為什么經(jīng)典斷裂力學算不準?——從"無限尖裂紋"到"真實物理過程"的范式轉(zhuǎn)變 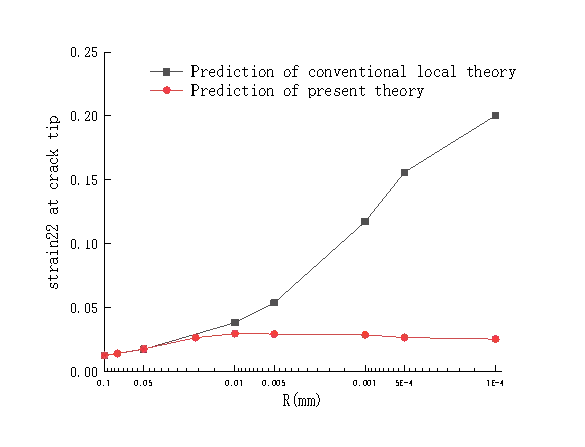
這個假設(shè)帶來了嚴重的物理矛盾: 應(yīng)力奇異性:根據(jù)LEFM,裂紋尖端的應(yīng)力隨 發(fā)散,理論上趨于無窮大,裂紋擴展將無任何阻力應(yīng)變奇異性:位移梯度在尖端處同樣發(fā)散1.2 無法解釋的"尺寸效應(yīng)"經(jīng)典理論的另一個致命缺陷是無法考慮缺陷尺度對承載能力的影響: 實驗觀測經(jīng)典理論預(yù)測矛盾小孔試樣的斷裂強度顯著高于大孔試樣
2193
積微科技 ??? 3月前
流體網(wǎng)格為什么有邊界層劃分 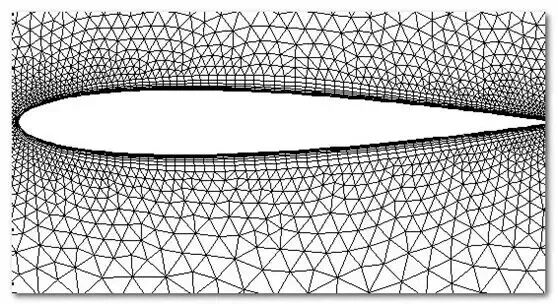
但是,因為求解這些方程在數(shù)學上及其困難(少數(shù)特殊情況除外),所以從理論上處理粘性流體運動的道路受到了阻礙。此外,在兩種最重要的流體,即水和空氣中,由于粘性很小,一般說來,由粘性摩擦而產(chǎn)生的力遠小于其它的力(重力和壓力)。因為這個緣故,人們很難理解被經(jīng)典理論所忽略的摩擦力怎么會在如此大的程度上影響流體的運動。
2974 1
網(wǎng)格大師 ??? 2年前
光刻技術(shù)第21期 | BCS計算光刻理論 
傳統(tǒng)線性壓縮感知技術(shù)因難以刻畫光刻系統(tǒng)的復(fù)雜非線性映射,優(yōu)化結(jié)果易出現(xiàn)工藝窗口收縮;經(jīng)典貝葉斯方法雖具備統(tǒng)計建模優(yōu)勢,但固定先驗分布無法適配多樣化光刻圖形,導(dǎo)致最優(yōu)信號估計精度不足。在此背景下,融合貝葉斯統(tǒng)計與壓縮感知的BCS(Bayesian Compressed Sensing)計算光刻理論應(yīng)運而生,成為破解上述瓶頸的關(guān)鍵理論支撐。
1220
武漢二元 ??? 1月前
轉(zhuǎn)崗自動駕駛控制算法最強路徑來啦! 
本次汽車學堂面向控制算法開發(fā),推出了自動駕駛控制算法(三階)訓練營,通過三個階段的系統(tǒng)學習,從經(jīng)典控制到現(xiàn)代控制,從理論到實踐,旨在幫助學員提升控制算法底層基礎(chǔ),在實踐項目中積累工程能力。
1987
木火柴 ??? 4年前
50個關(guān)鍵詞,帶你全面了解量子計算 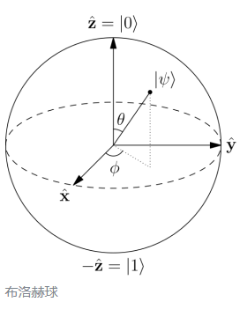
在經(jīng)典力學里,這是不可能發(fā)生的,但使用量子力學理論卻可以給出合理解釋。在量子力學中,波函數(shù)表示粒子在特定位置的概率,這表明粒子存在位于障礙物另一側(cè)的概率。
4412 1
牛頓家的計算機 ??? 3年前
Moldex3D仿真分析之塑件冷卻時間理論計算 
MHC將各種經(jīng)典理論公式計算出的結(jié)果以可視化的方式呈現(xiàn)、并搭配簡易的輸入接口,方便用戶在不需深入了解理論基礎(chǔ)的情況下,也能快速計算出理論值,以利進行CAE模擬之前對于各項成型參數(shù)能完成初步的評估。
2484
Moldex3D 中國 ??? 4月前
Moldex3D仿真分析之塑件冷卻時間理論計算 
MHC將各種經(jīng)典理論公式計算出的結(jié)果以可視化的方式呈現(xiàn)、并搭配簡易的輸入接口,方便用戶在不需深入了解理論基礎(chǔ)的情況下,也能快速計算出理論值,以利進行CAE模擬之前對于各項成型參數(shù)能完成初步的評估。
1253
Moldex3D 中國 ??? 3月前
新品速遞|漢航發(fā)布小型振動控制儀H18 
憑藉扎實的理論基礎(chǔ)和豐富的工程實踐,漢航推出業(yè)界最小的手掌大小尺寸高精度振動控制儀--漢航H18,下一步漢航將推出火柴盒尺寸控制儀,使得振動控制儀的使用不再局限于試驗室內(nèi)的電磁或液壓振動臺閉環(huán)控制,同時使得系統(tǒng)某些關(guān)鍵部位的在線式主動振動控制和隨動姿態(tài)控制成為可能。
3975
漢航 ??? 2年前
GTN模型文章推薦(二十) 
具體介紹如下:原始的GTN模型的屈服函數(shù)為:原始的GTN模型建立與經(jīng)典的Mises屈服理論之上,但摒棄了塑性變形過程中的體積不變性原理,考慮的孔洞對材料屈服的影響,當?shù)刃Э锥大w積分數(shù)為1時,表示材料完好,此時材料的屈服退化為經(jīng)典的Mises屈服,當?shù)刃w積分數(shù)為特定值時材料完全失效。
3153 22 10
晶體塑性有限元 ??? 2年前
傳統(tǒng)脆性斷裂相場模型的三維UEL理論及代碼 
同時,通過弱形式方程也可推導(dǎo)得到強形式的控制方程,即位移場和相場的控制方程。對上述弱形式進行分部積分可得:因次位移場和相場的強形式控制方程為:以及相應(yīng)的邊界條件為:3 有限元離散為推導(dǎo)有限元離散方程,對位移場和相場控制方程的弱形式進行處理:對位移場和相場進行插值可得:m指單元節(jié)點的個數(shù)。
4489 5 5
dearjj ??? 1年前
MCCB觸頭打開電弧運動經(jīng)典案例 
MCCB觸頭打開電弧運動經(jīng)典案例 電弧分析是斷路器設(shè)備的重點與難點,主要考慮流體分析、熱分析、電場分析、磁場分析,甚至軟件的動網(wǎng)格設(shè)置,包含了材料的屬性設(shè)置,軟件的控制過程,求解過程的控制等高度復(fù)雜的一個仿真。其應(yīng)用的重要性在電氣行業(yè)不言而喻,能夠明確而直觀的查看電弧的運動過程,進而為滅弧室的設(shè)計提供重要的理論依據(jù)。
2620 1
電弧仿真 ??? 4年前
Ansys及有限元理論相關(guān)國外書籍推薦 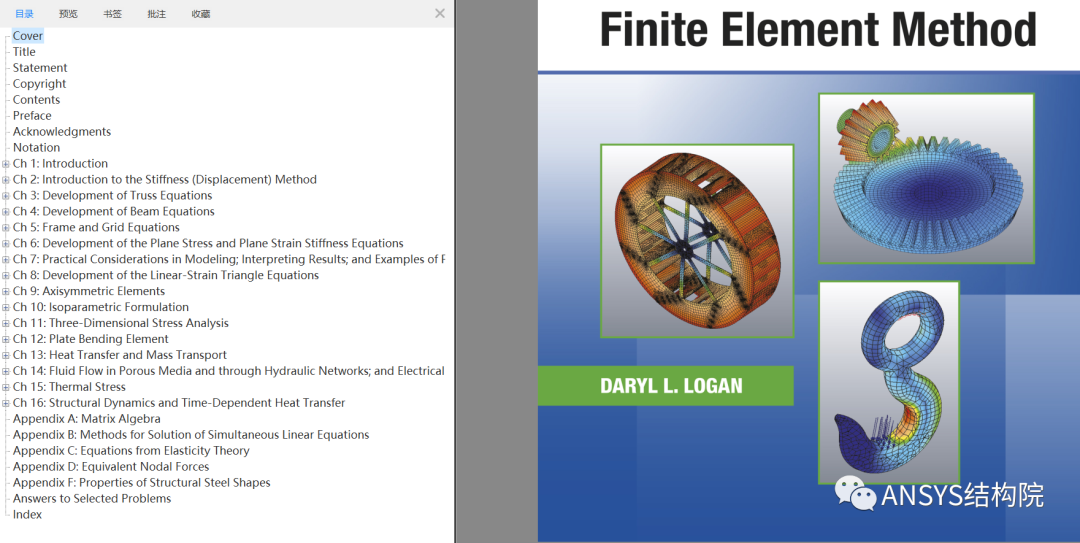
二、ANSYS經(jīng)典 GUI界面學習教材推薦1、Finite Element Simulations Using Ansys全書主要行文思路為 解析解與軟件操作的對比,如果有一定的有限元理論基礎(chǔ),非常適合看這本書,全書包含了不同種類的案例分析,各個專業(yè)都略有涉及,軟件版本是基于ANSYS14.5版本。全書共計429頁。
3926 3 1
仿真客 ??? 3年前
關(guān)于計算流體力學,你知道多少? 附計算流體力學從實踐中學習下載 
有限差分法 有限差分法是數(shù)值解法中最經(jīng)典的方法。它是將求解區(qū)域劃分為差分網(wǎng)格,用于有限個網(wǎng)格節(jié)點代替連續(xù)的求解域,然后將偏微分方程(控制方程)的導(dǎo)數(shù)用差商代替,推導(dǎo)出含有離散點上有限個未知數(shù)的差分方程組。 該方法的產(chǎn)生和發(fā)展比較早,也比較成熟,較多用于求解雙曲線和拋物線型問題。
2765 4 4
飛行家孫 ??? 4年前
20條/頁 
 102
102 跳至頁

技術(shù)鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP
