



《基于 ABAQUS 的桁架機(jī)器人模態(tài)分析》 
與 ABAQUS 模態(tài)仿真 結(jié)果的第 5、7、9、10 階振型幾乎相同,二者一致 性較好,這說(shuō)明了其桁架機(jī)器人建模與約束條件設(shè)置的準(zhǔn)確性[9]。5 結(jié)論 本文以桁架機(jī)器人為研究對(duì)象,通過(guò) ABAQUS 軟件以及模態(tài)試驗(yàn)對(duì)桁架機(jī)器人進(jìn)行模態(tài)分析,得 出以下結(jié)論: (1)通過(guò) ABAQUS 有限元仿真,計(jì)算出桁架 機(jī)器人的固有頻率及其振型。
3089 2
CAEer吳皓 ??? 2年前
設(shè)計(jì)仿真 | AI+仿真雙驅(qū)動(dòng)!海克斯康領(lǐng)跑人形機(jī)器人研發(fā) 
02控制策略仿真與驗(yàn)證??怂箍档慕鉀Q方案支持控制策略的仿真與驗(yàn)證,包括關(guān)節(jié)驅(qū)動(dòng)控制策略和人形機(jī)器人穩(wěn)定性控制策略開(kāi)發(fā)。通過(guò)將Easy5控制算法與Adams的運(yùn)動(dòng)仿真模型進(jìn)行協(xié)同驗(yàn)證,研發(fā)人員可以快速測(cè)試和優(yōu)化控制策略,確保機(jī)器人在各種運(yùn)動(dòng)狀態(tài)下的穩(wěn)定性和響應(yīng)性能。這種協(xié)同驗(yàn)證方式能夠有效縮短研發(fā)周期,降低研發(fā)成本。
3242 1 1
海克斯康設(shè)計(jì)與仿真 ??? 1年前
【機(jī)器人仿真案例】基于RecurDyn Durability預(yù)測(cè)機(jī)器人夾爪疲勞壽命 
/FFlex RecurDyn/Durability客戶(hù)痛點(diǎn)n新型機(jī)器人夾爪設(shè)計(jì)需開(kāi)展夾持力分析;n滿(mǎn)足高負(fù)載需求的動(dòng)應(yīng)力分析;n對(duì)設(shè)計(jì)壽命10年的機(jī)器人夾爪進(jìn)行壽命預(yù)測(cè);n需獲取耐久性分析數(shù)據(jù)。
1430
杭州擬創(chuàng)(RecurDyn原廠) ??? 1月前
六軸碼垛機(jī)器人admas正逆運(yùn)動(dòng)學(xué)仿真 
,設(shè)置仿真的時(shí)間為2000毫秒,仿真的步數(shù)為500步,可觀察到機(jī)器人在各個(gè)關(guān)節(jié)的驅(qū)動(dòng)下繪制出了其手腕末端的軌跡,并且該運(yùn)動(dòng)軌跡與前面添加一般點(diǎn)驅(qū)動(dòng)后的運(yùn)動(dòng)學(xué)逆解的末端運(yùn)動(dòng)軌跡即圖5-15所示軌跡基本一樣,采用ADAMS從已知的位姿變換再反求機(jī)器人關(guān)節(jié)角度的正確性得到了驗(yàn)證。
2373
余俊煒 ??? 3年前
ABAQUS-氣動(dòng)驅(qū)動(dòng)PneuNet結(jié)構(gòu)軟體機(jī)器人仿真 

本課程基于Abaqus,應(yīng)用兩種加載方式——Fluid Cavity與Pressure分別介紹了氣動(dòng)驅(qū)動(dòng)軟體機(jī)器人仿真分析流程。該軟體機(jī)器人涉及兩種材料,主變形部分選用超彈性材料,應(yīng)用Yeoh本構(gòu)定義材料屬性;限制層部分定義為線彈性材料。此外,對(duì)結(jié)果的后處理進(jìn)行了簡(jiǎn)要介紹。
3764 6
Sunshine1516 ??? 3年前
碼垛機(jī)器人admas仿真 
機(jī)器人動(dòng)力學(xué)仿真按照運(yùn)動(dòng)學(xué)仿真的類(lèi)似步驟為機(jī)器人添加材料、運(yùn)動(dòng)副和關(guān)節(jié)驅(qū)動(dòng),給機(jī)器人手腕末端施加50N最大負(fù)載,仿真模型如圖5-17。
2276
余俊煒 ??? 3年前
Adams管路機(jī)器人仿真 
Adams管路機(jī)器人仿真 本文通過(guò)Adams完成管路機(jī)器人建模及仿真,使其可以沿不同管徑的管路運(yùn)動(dòng)前進(jìn),從而實(shí)現(xiàn)管路的檢查及清理。
4327 1
擺渡人張 ??? 2年前
RecurDyn機(jī)器人仿真應(yīng)用及核心技術(shù)路線詳解 
可以驗(yàn)證控制算法,預(yù)測(cè)機(jī)器人行為,反饋控制效果可以提供對(duì)機(jī)器人的高保真預(yù)測(cè)。</p><p>例如在機(jī)械手臂的案例仿真結(jié)束后,將期望的旋轉(zhuǎn)角度曲線與通過(guò)仿真控制的實(shí)際旋轉(zhuǎn)角度曲線進(jìn)行了比較。下圖中藍(lán)線表示仿真結(jié)果,紅線表示目標(biāo)曲線。結(jié)果顯示控制結(jié)果與目標(biāo)曲線完美匹配。
2382 1
杭州擬創(chuàng)(RecurDyn原廠) ??? 4月前
小米發(fā)布仿生四足機(jī)器人“鐵蛋”!解讀背后的建模和仿真技術(shù) 
為獲得更好的運(yùn)動(dòng)效果,可采用五次多項(xiàng)式軌跡進(jìn)行足端軌跡規(guī)劃,并在機(jī)器人行走前對(duì) 4 條腿的初始位置進(jìn)行調(diào)整,使得在行走過(guò)程中,重心相對(duì)于支撐腳連線的運(yùn)動(dòng)盡量保證前后對(duì)稱(chēng),提高行走過(guò)程中機(jī)身穩(wěn)定。最后,根據(jù)仿真結(jié)果對(duì)設(shè)計(jì)方案進(jìn)行優(yōu)化,提高機(jī)器人結(jié)構(gòu)的合理性。理論就說(shuō)到這了,如果想親自體驗(yàn)一番的話(huà),可以?huà)叽a領(lǐng)取北鯤云2000核時(shí)免費(fèi)體驗(yàn)券在北鯤云超算平臺(tái)進(jìn)行仿真模擬計(jì)算。
2920
深圳北鯤云計(jì)算有限公司 ??? 3年前
RecurDyn成功案例:基于仿真設(shè)計(jì)的多關(guān)節(jié)機(jī)器人 
借助仿真方法,可以在物理樣機(jī)制造之前,對(duì)機(jī)器人的重要部件進(jìn)行早期評(píng)估和檢查,從而大幅降低研發(fā)的時(shí)間和成本。ITRI成立于1973年,是一家技術(shù)研發(fā)機(jī)構(gòu),將RecurDyn的虛擬樣機(jī)技術(shù)應(yīng)用于多關(guān)節(jié)機(jī)器人的開(kāi)發(fā)過(guò)程中。ITRI利用RecurDyn可以設(shè)計(jì)控制機(jī)器人運(yùn)動(dòng)的控制器,包括電機(jī)、軸承和減速器等各種機(jī)器人的部件。
2607 1 1
杭州擬創(chuàng)(RecurDyn原廠) ??? 3年前
從"流浪地球"到ChatGPT,頂流機(jī)器人設(shè)計(jì)需要哪些仿真技術(shù)? 
2、在機(jī)器人的設(shè)計(jì)流程中,要用到哪些仿真技術(shù) 在這里,”仿真“一詞并不僅僅指對(duì)三維模型的力學(xué)、熱學(xué)等有限元仿真,也包含更廣義的,電路仿真、控制系統(tǒng)的仿真等等。 以多體動(dòng)力學(xué)分析為例。機(jī)器人一般都包含多個(gè)可動(dòng)的關(guān)節(jié)。
2113
安世亞太 ??? 3年前
RecurDyn成功案例:基于仿真設(shè)計(jì)的多關(guān)節(jié)機(jī)器人 
借助仿真方法,可以在物理樣機(jī)制造之前,對(duì)機(jī)器人的重要部件進(jìn)行早期評(píng)估和檢查,從而大幅降低研發(fā)的時(shí)間和成本。ITRI成立于1973年,是一家技術(shù)研發(fā)機(jī)構(gòu),將RecurDyn的虛擬樣機(jī)技術(shù)應(yīng)用于多關(guān)節(jié)機(jī)器人的開(kāi)發(fā)過(guò)程中。ITRI利用RecurDyn可以設(shè)計(jì)控制機(jī)器人運(yùn)動(dòng)的控制器,包括電機(jī)、軸承和減速器等各種機(jī)器人的部件。
2527
杭州擬創(chuàng)(RecurDyn原廠) ??? 2年前
Adams管路機(jī)器人仿真
Adams管路機(jī)器人仿真 本文通過(guò)Adams完成管路機(jī)器人建模及仿真,使其可以沿不同管徑的管路運(yùn)動(dòng)前進(jìn),從而實(shí)現(xiàn)管路的檢查及清理。
3747
擺渡人張 ??? 2年前
機(jī)器人行業(yè)工程仿真分析解決方案 
優(yōu)飛迪依托國(guó)際領(lǐng)先的工程仿真軟件以及強(qiáng)大的技術(shù)服務(wù)能力與豐富的機(jī)器人行業(yè)服務(wù)經(jīng)驗(yàn),基于“仿真驅(qū)動(dòng)設(shè)計(jì)”的新研發(fā)模式,針對(duì)各種仿真需求,創(chuàng)造性的提出機(jī)器人行業(yè)仿真設(shè)計(jì)解決方案,以解決目前機(jī)器人行業(yè)存在的三大痛點(diǎn)問(wèn)題: 找不到適合本企業(yè)和工程師團(tuán)隊(duì)的工程仿真軟件、仿真精度難以滿(mǎn)足本企業(yè)的需求、求解速度難以滿(mǎn)足本企業(yè)的需求。
2550
Cruise ??? 4年前
2024年RecurDyn優(yōu)秀案例競(jìng)賽作品分享:核探測(cè)機(jī)器人底盤(pán)設(shè)計(jì)與越障性能仿真驗(yàn)證 
圖3-3(b)為單側(cè)驅(qū)動(dòng)扭矩,機(jī)器人從靜止階段先加速到達(dá)最大速度之后進(jìn)行勻速,驅(qū)動(dòng)扭矩也隨之由0N.m增加到7N.m后保持在該范圍之內(nèi),驅(qū)動(dòng)扭矩變化過(guò)程與速度變化過(guò)程高度一致。圖3-3(c)為機(jī)器人在行駛過(guò)程中側(cè)邊彈簧受力與伸長(zhǎng)量變化過(guò)程,由于彈簧不存在z軸方向的長(zhǎng)度變化,所以該分力為0,圖3-3(d)為單個(gè)履帶板在行駛過(guò)程中張緊力變化趨勢(shì),隨著履帶的轉(zhuǎn)動(dòng)其張緊力呈周期性變化。
2554
杭州擬創(chuàng)(RecurDyn原廠) ??? 1年前
《基于 RecurDyn 的四履帶足機(jī)器人運(yùn)動(dòng)學(xué)仿真》現(xiàn)已開(kāi)放領(lǐng)取 
摘要: 應(yīng)用多體動(dòng)力學(xué)仿真分析軟件 RecurDyn 對(duì)四履帶足機(jī)器人進(jìn)行全三維建模及越障過(guò)程仿真,并分析了履帶機(jī)器人行走過(guò) 程 中 的 力 學(xué) 模 型,仿真 結(jié) 果 動(dòng) 態(tài),準(zhǔn)確的反映了四履帶足機(jī)器人行走機(jī)構(gòu)的越障過(guò)程,驗(yàn)證了四履帶足機(jī)器人行走機(jī)構(gòu)較之雙履帶結(jié)構(gòu)形式出色的越障能力,體現(xiàn) 了 RecurDyn 軟件在履帶機(jī)器人的動(dòng)力學(xué)仿真分析方面的有效性和優(yōu)越性 。1. 引言2.
2553
上海安世亞太 ??? 2年前
網(wǎng)絡(luò)課 | ANSYS焊接機(jī)器人仿真相關(guān)案例分享 
本文重點(diǎn)就焊接機(jī)器人定位精度和焊接工藝參這兩方面的內(nèi)容進(jìn)行展開(kāi),詳細(xì)介紹ANSYS的相關(guān)仿真應(yīng)用案例以及具體的仿真流程方法。
1954
陽(yáng)普科技 ??? 4年前
ABB機(jī)器人基于Visual Components仿真軟件的虛實(shí)結(jié)合 
此功能有以下優(yōu)勢(shì):1.機(jī)器人程序的仿真驗(yàn)證:在下載到實(shí)際設(shè)備之前,先在虛擬環(huán)境下模擬運(yùn)行,檢驗(yàn)程序是否存在問(wèn)題,從而減少實(shí)際調(diào)試時(shí)間。2.產(chǎn)能評(píng)估:基于模擬仿真系統(tǒng),可以提前估算機(jī)器人產(chǎn)線的理論產(chǎn)能,為實(shí)際量產(chǎn)提供參考依據(jù)。3. 培訓(xùn)與演示:通過(guò)虛擬仿真,可以讓新員工提前熟悉機(jī)器人工作流程,進(jìn)行產(chǎn)線操作培訓(xùn)與考核,也可以進(jìn)行生產(chǎn)線演示推廣。4.
2199
仿真驅(qū)動(dòng)設(shè)計(jì) ??? 2年前
什么是機(jī)器人離線編程? 衡祖仿真 
Delfoi Robotics 是集數(shù)字化工廠仿真和離線編程為一體的現(xiàn)代化智能工廠軟件,適用于工業(yè)機(jī)器人所有應(yīng)用場(chǎng)景,采用機(jī)器人仿真與離線技術(shù),為用戶(hù)提供針對(duì)性解決方案以滿(mǎn)足每家公司苛刻的工藝要求。Defoi離線編程:兼容焊接、切割、噴涂、點(diǎn)焊、拋光等工業(yè)機(jī)器人工藝應(yīng)用,支持多品牌機(jī)器人離線編程和程序?qū)雽?dǎo)出功能,實(shí)現(xiàn)真正意義上的離線編程。二、離線編程的步驟是什么?
2078
仿真驅(qū)動(dòng)設(shè)計(jì) ??? 1年前
三維工廠仿真軟件-離散物流機(jī)器人編程與PLC 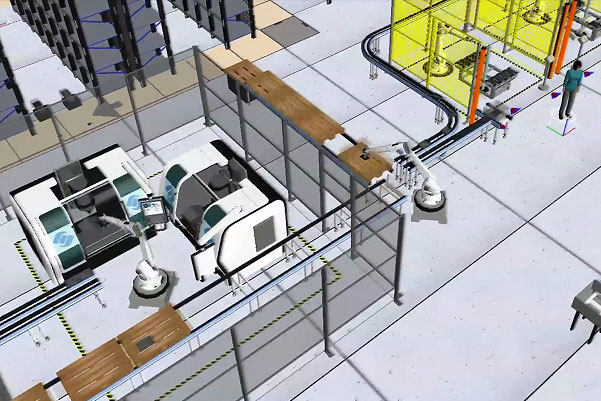
● 邁向數(shù)字化工廠——從設(shè)計(jì)到實(shí)施的全周期支持Visual Components以其突出的三維工廠仿真能力,為離散物流、機(jī)器人編程及PLC調(diào)試等關(guān)鍵環(huán)節(jié)提供了有力支持。借助這一平臺(tái),企業(yè)能夠快速響應(yīng)市場(chǎng)變化,靈活調(diào)整生產(chǎn)策略,降低運(yùn)營(yíng)成本,提高產(chǎn)品質(zhì)量,最終實(shí)現(xiàn)從設(shè)計(jì)到實(shí)施的全周期優(yōu)化。
2292
仿真驅(qū)動(dòng)設(shè)計(jì) ??? 2年前
20條/頁(yè) 
 172
172 跳至頁(yè)

技術(shù)鄰APP
工程師必備
工程師必備
- 項(xiàng)目客服
- 培訓(xùn)客服
- 平臺(tái)客服
TOP
