





【科技前沿】打印出行走的軟體機(jī)器人 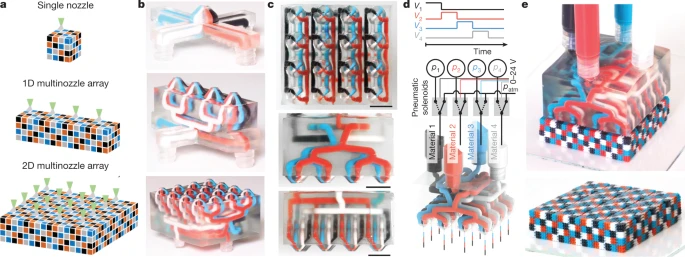
為了證明MM3D打印對(duì)打印對(duì)象的組成、結(jié)構(gòu)及特性的空間編程能力,文章列舉了打印折紙機(jī)構(gòu)以及氣動(dòng)行走機(jī)器人的兩個(gè)例子。圖4 MM3D打印折紙圖5 打印行走軟體機(jī)器人展望未來(lái),這種集成化的多材料打印噴頭將實(shí)現(xiàn)體素化功能性結(jié)構(gòu)的快速打印,此外在打印分辨率和打印效率方面,定制化的打印墨水和打印結(jié)構(gòu)的功能化同樣具有重要的研究和應(yīng)用價(jià)值。
2209
機(jī)械工程師 ??? 3年前
自動(dòng)智能裝配技術(shù)在汽車焊裝車間的研究與應(yīng)用 
自動(dòng)智能裝配原理 1.常用傳感器 自動(dòng)智能裝配硬件系統(tǒng)主要由機(jī)器人、VMT 電腦、抓手及傳感器等組成,如圖1所示。軟件使用了VMT的系統(tǒng)作為自動(dòng)智能裝配的軟件。機(jī)器人為北京奔馳所使用的標(biāo)準(zhǔn)的庫(kù)卡機(jī)器人。 自動(dòng)智能裝配的測(cè)量主要是通過(guò)各種各樣的傳感器來(lái)實(shí)現(xiàn)的,常用的傳感器分為三種:點(diǎn)傳感器、線傳感器、圓形傳感器。
4961
汽車-小江 ??? 2年前
外骨骼機(jī)器人未來(lái)走向哪? 
外骨骼機(jī)器人的賽道核心究竟是什么? ▍依然存在的難題 外骨骼機(jī)器人在原理上并不復(fù)雜,像人體一樣,外骨骼機(jī)器人主要由機(jī)械骨架、控制中樞、驅(qū)動(dòng)系統(tǒng)三大核心部件構(gòu)成。 在創(chuàng)企的PPT中都描繪著外骨骼機(jī)器人的美好前景,許多科幻影視作品則變相提供著畫面。
3168
機(jī)械工程師 ??? 3年前
機(jī)器人方向控制中應(yīng)用的磁阻角度傳感芯片 
機(jī)器人的應(yīng)用日漸廣泛,對(duì)工業(yè)生產(chǎn)與提高效能有重要作用。工業(yè)機(jī)器人主要利用伺服電機(jī)進(jìn)行運(yùn)動(dòng)控制,從而實(shí)現(xiàn)移動(dòng)和抓取工具。本文將詳細(xì)討論伺服電機(jī)的特點(diǎn)以及不同類型伺服電機(jī)相應(yīng)的控制原理。運(yùn)動(dòng)控制與機(jī)器人密切相關(guān)。工業(yè)應(yīng)用中的機(jī)器人必須透過(guò)由多款電機(jī)所構(gòu)成的致動(dòng)器才能自行移動(dòng),以執(zhí)行任務(wù)或透過(guò)機(jī)器手臂抓取工具。機(jī)器人的運(yùn)動(dòng)控制系統(tǒng)通常由電機(jī)控制器、電機(jī)驅(qū)動(dòng)、電機(jī)本體(多為伺服電機(jī))組成。
1970
如果我年少有為 ??? 2年前
半軸精車、鉆孔、孔倒角自動(dòng)化設(shè)計(jì) 
圖6 發(fā)那科R-2000iC機(jī)器人 ⑵機(jī)械手爪:機(jī)器人手爪為2套相同手爪并列布局,實(shí)現(xiàn)上下料切換,如圖7所示。手爪為氣動(dòng)結(jié)構(gòu),手指為仿形設(shè)計(jì),可穩(wěn)定抓取工件桿部。本方案手爪采用杠桿原理,配置缸徑 φ160mm氣缸,通過(guò)拉緊松開(kāi)杠桿,實(shí)現(xiàn)手爪開(kāi)合抓取工件動(dòng)作,抓取范圍直徑 φ45~ φ65mm。
2376
FMMM ??? 4年前
【機(jī)器人仿真案例】基于RecurDyn Durability預(yù)測(cè)機(jī)器人夾爪疲勞壽命 
案例概要產(chǎn)品:機(jī)器人夾爪分析目標(biāo):預(yù)測(cè)夾爪機(jī)構(gòu)薄弱部位的疲勞壽命半導(dǎo)體制造工藝需要處理大批量作業(yè)任務(wù),這推動(dòng)了專用機(jī)器人及各類自動(dòng)化技術(shù)的發(fā)展,其中包括自主移動(dòng)機(jī)器人(AMR)。半導(dǎo)體專用機(jī)器人夾爪的一個(gè)核心特性是:以極小接觸面積抓取物件,從而滿足潔凈室的潔凈度要求。因此,夾爪在結(jié)構(gòu)上受到諸多限制,同時(shí)相較于其機(jī)械結(jié)構(gòu)尺寸,還需承載相對(duì)較重的物件。
1430
杭州擬創(chuàng)(RecurDyn原廠) ??? 1月前
基于Adams的六足直立式步行機(jī)器人運(yùn)動(dòng)仿真分析 
關(guān)鍵詞 Adams 六足步行機(jī)器人 四連桿機(jī)構(gòu) 運(yùn)動(dòng)學(xué)分析0 引言曲柄連桿機(jī)構(gòu)是連桿足式步行機(jī)器人的核心機(jī)構(gòu),是實(shí)現(xiàn)步行腿行走的關(guān)鍵零部件[1]。步行機(jī)構(gòu)曲柄連桿的方案設(shè)計(jì)及其運(yùn)動(dòng)特性是影響機(jī)器人行走和運(yùn)動(dòng)動(dòng)作的重要因素[2]。
4178 7 8
仿真客 ??? 3年前
移動(dòng)機(jī)器人的分類及介紹
一、輪式機(jī)器人 輪式機(jī)器人是移動(dòng)機(jī)器人中較為常見(jiàn)的類型,具有結(jié)構(gòu)相對(duì)簡(jiǎn)單、運(yùn)動(dòng)高效且穩(wěn)定的特點(diǎn)。 差速驅(qū)動(dòng)機(jī)器人:這種機(jī)器人主要依靠?jī)蓚€(gè)獨(dú)立控制的輪子來(lái)實(shí)現(xiàn)移動(dòng)。在室內(nèi)環(huán)境如辦公室、倉(cāng)庫(kù)等場(chǎng)景中應(yīng)用廣泛。其工作原理基于兩個(gè)輪子的速度差來(lái)實(shí)現(xiàn)轉(zhuǎn)向,例如在清潔機(jī)器人領(lǐng)域,差速驅(qū)動(dòng)機(jī)器人能夠靈活地在家具之間穿梭,對(duì)地面進(jìn)行清掃和吸塵作業(yè)。
2753
探索者第2號(hào)前來(lái)報(bào)到 ??? 1年前
【5/9更新】無(wú)所不能的工業(yè)機(jī)器人,30張動(dòng)圖看個(gè)夠 
2 0世紀(jì)50年代末,工業(yè)機(jī)器人最早開(kāi)始投入使用。自此,在工業(yè)生產(chǎn)領(lǐng)域,很多繁重、重復(fù)或者毫無(wú)意義的流程性作業(yè)可以由工業(yè)機(jī)器人來(lái)代替人類完成。到了20世紀(jì)90年代,隨著計(jì)算機(jī)技術(shù)、智能技術(shù)的進(jìn)步和發(fā)展,第二代具有一定感覺(jué)功能的機(jī)器人已經(jīng)實(shí)用化并開(kāi)始推廣,具有視覺(jué)、觸覺(jué)、高靈巧手指、能行走的第三代智能機(jī)器人相繼出現(xiàn)并開(kāi)始走向應(yīng)用。
1953 1 2
技術(shù)鄰CAD學(xué)習(xí) ??? 4年前
RecurDyn機(jī)器人仿真應(yīng)用及核心技術(shù)路線詳解 
</p><p><strong>【建模流程及原理】</strong></p><p><strong>Step1 抓取動(dòng)作模擬(OnOff Joint)</strong>:通過(guò)創(chuàng)建開(kāi)關(guān)副(OnOff Joint),定義機(jī)器人工作過(guò)程中的離散動(dòng)作(如抓取、放置),并設(shè)定其觸發(fā)條件,例如:當(dāng)仿真時(shí)間未達(dá)到設(shè)定值時(shí),機(jī)械手與物體無(wú)約束;達(dá)到時(shí)間后,自動(dòng)鎖定兩者之間的6個(gè)自由度,實(shí)現(xiàn)“抓取”動(dòng)作。
2382 1
杭州擬創(chuàng)(RecurDyn原廠) ??? 4月前
小米發(fā)布仿生四足機(jī)器人“鐵蛋”!解讀背后的建模和仿真技術(shù) 
為獲得更好的運(yùn)動(dòng)效果,可采用五次多項(xiàng)式軌跡進(jìn)行足端軌跡規(guī)劃,并在機(jī)器人行走前對(duì) 4 條腿的初始位置進(jìn)行調(diào)整,使得在行走過(guò)程中,重心相對(duì)于支撐腳連線的運(yùn)動(dòng)盡量保證前后對(duì)稱,提高行走過(guò)程中機(jī)身穩(wěn)定。最后,根據(jù)仿真結(jié)果對(duì)設(shè)計(jì)方案進(jìn)行優(yōu)化,提高機(jī)器人結(jié)構(gòu)的合理性。理論就說(shuō)到這了,如果想親自體驗(yàn)一番的話,可以掃碼領(lǐng)取北鯤云2000核時(shí)免費(fèi)體驗(yàn)券在北鯤云超算平臺(tái)進(jìn)行仿真模擬計(jì)算。
2920
深圳北鯤云計(jì)算有限公司 ??? 3年前
物流機(jī)器人「手太重」?HBK六維力傳感器如何「溫柔拿捏」 
挑戰(zhàn):自動(dòng)化物流系統(tǒng)倉(cāng)庫(kù)中的物品多樣性 安全處理易碎、柔軟或形狀不規(guī)則的包裹與物品 減少因缺乏觸覺(jué)反饋而導(dǎo)致的抓取放置誤差 降低倉(cāng)庫(kù)操作人員的負(fù)擔(dān)與重復(fù)性工作需要讓自動(dòng)化物流系統(tǒng)具備物理智能與觸控級(jí)精度,使機(jī)器人在視覺(jué)功能基礎(chǔ)上,進(jìn)一步擁有根據(jù)每件物品的物理特性做出響應(yīng)的能力。
1782
HBK測(cè)試與測(cè)量 ??? 5月前
工業(yè)機(jī)器人與協(xié)作機(jī)器人概念不同 
協(xié)作機(jī)器人則主打與人協(xié)同作業(yè),設(shè)計(jì)更注重靈活性與安全性。其體型輕巧,配備多種傳感器,能實(shí)時(shí)感知周圍環(huán)境及人體動(dòng)作,一旦檢測(cè)到與人體接近或接觸,會(huì)立即調(diào)整運(yùn)行狀態(tài),避免碰撞風(fēng)險(xiǎn),可與人類在同一空間緊密配合。在 3C 產(chǎn)品組裝環(huán)節(jié),協(xié)作機(jī)器人能協(xié)助工人完成精細(xì)零部件的抓取、放置,憑借靈活的關(guān)節(jié)與精準(zhǔn)的力控,既保障操作精準(zhǔn)度,又能適應(yīng)多樣化、小批量生產(chǎn)需求,快速切換生產(chǎn)任務(wù)。
2339
德基西瓜 ??? 11月前
靈巧手CNC機(jī)加工:人形機(jī)器人具身智能的關(guān)鍵零部件制造方案 
靈巧手CNC機(jī)加工在具身智能與人形機(jī)器人中的關(guān)鍵作用隨著人工智能與機(jī)器人技術(shù)的飛速發(fā)展,“具身智能”逐漸成為學(xué)術(shù)界和產(chǎn)業(yè)界的熱門話題。在具身智能的研究和應(yīng)用中,靈巧手(Dexterous Hand) 被認(rèn)為是人形機(jī)器人最具挑戰(zhàn)性的核心部件之一。它不僅僅是一個(gè)抓取工具,更是人形機(jī)器人實(shí)現(xiàn)與真實(shí)世界高效交互的關(guān)鍵。
2631
2103707493 ??? 9月前
魯渝能源四足機(jī)器人無(wú)線充電方案,量身定制,告別“趴窩”焦慮 
四足機(jī)器人的作業(yè)環(huán)境越惡劣,傳統(tǒng)充電方式的短板暴露得越徹底。 痛點(diǎn)三:停靠精度與晃動(dòng)誤差四足機(jī)器人在完成作業(yè)任務(wù)后,自動(dòng)行走到充電區(qū)域。然而,不同于輪式AGV的平穩(wěn)停靠,四足機(jī)器人站立時(shí)存在自然的晃動(dòng)和姿態(tài)變化。機(jī)械臂或連桿式對(duì)接需要毫米級(jí)的重復(fù)定位精度,而四足機(jī)器人的機(jī)械結(jié)構(gòu)特性注定了它難以做到這一點(diǎn)。對(duì)接失敗、反復(fù)嘗試、充電中斷,成為家常便飯。
738
魯渝能源無(wú)線充電 ??? 17天前
《基于 ABAQUS 的桁架機(jī)器人模態(tài)分析》 
4 模態(tài)結(jié)果分析 由于固有頻率是結(jié)構(gòu)的固有特性,機(jī)器人無(wú)論 運(yùn)行到何種位置狀態(tài),其易受影響的頻率范圍都大 致相同[8]。因此,本文將桁架機(jī)器人各方向上的移動(dòng) 軸設(shè)置在抓取物料的提升階段,這樣可以模擬桁架 機(jī)器人在抓取工作中時(shí)受到的沖擊影響。
3088 2
CAEer吳皓 ??? 2年前
米思米大寰機(jī)器人代理店-末端執(zhí)行器工業(yè)采購(gòu)平臺(tái)推薦 
大寰機(jī)器人官方授權(quán)品牌代理店入駐米思米一站式工業(yè)品平臺(tái),大寰機(jī)器人以可靠性、高壽命、智能化和易用性為核心優(yōu)勢(shì),技術(shù)扎實(shí)、產(chǎn)品線全、市場(chǎng)認(rèn)可度高,是國(guó)內(nèi)該領(lǐng)域的標(biāo)桿企業(yè)。國(guó)內(nèi)電動(dòng)末端執(zhí)行器銷量第一,累計(jì)交付超20萬(wàn)套,客戶包括800多家企業(yè),覆蓋50多個(gè)行業(yè)。更多大寰機(jī)器人的產(chǎn)品歡迎進(jìn)入米思米官網(wǎng)搜索“品牌代理店”或點(diǎn)擊大寰機(jī)器人代理店頁(yè)面進(jìn)行了解。
2340
自動(dòng)化工業(yè)零件 ??? 3月前
《基于 RecurDyn 的四履帶足機(jī)器人運(yùn)動(dòng)學(xué)仿真》現(xiàn)已開(kāi)放領(lǐng)取 
摘要: 應(yīng)用多體動(dòng)力學(xué)仿真分析軟件 RecurDyn 對(duì)四履帶足機(jī)器人進(jìn)行全三維建模及越障過(guò)程仿真,并分析了履帶機(jī)器人行走過(guò) 程 中 的 力 學(xué) 模 型,仿真 結(jié) 果 動(dòng) 態(tài),準(zhǔn)確的反映了四履帶足機(jī)器人行走機(jī)構(gòu)的越障過(guò)程,驗(yàn)證了四履帶足機(jī)器人行走機(jī)構(gòu)較之雙履帶結(jié)構(gòu)形式出色的越障能力,體現(xiàn) 了 RecurDyn 軟件在履帶機(jī)器人的動(dòng)力學(xué)仿真分析方面的有效性和優(yōu)越性 。1. 引言2.
2553
上海安世亞太 ??? 2年前
什么是世界模型?有什么用? 
看到行人在斑馬線行走,它知道汽車應(yīng)該停在斑馬線前。 游戲開(kāi)發(fā),一個(gè)會(huì)做夢(mèng)的世界模型。游戲中的NPC不再是固定程序,它將能和玩家自然地對(duì)話和互動(dòng),擁有無(wú)限的交互可能。 具身智能,一個(gè)會(huì)做家務(wù)的世界模型。當(dāng)看到的對(duì)象是水杯時(shí),它知道抓取力量應(yīng)該大點(diǎn),而對(duì)象是人手時(shí),力度就要減小。 工業(yè)機(jī)器人,一個(gè)會(huì)打螺絲的世界模型。看到傳送帶不同的零件,它知道應(yīng)該把它裝在哪,用多大的力。
1932
天洑軟件 ??? 4月前
20條/頁(yè) 
 24
24 跳至頁(yè)

技術(shù)鄰APP
工程師必備
工程師必備
- 項(xiàng)目客服
- 培訓(xùn)客服
- 平臺(tái)客服
TOP
