



ANSYS workbench 四連桿運動學分析 
本案例適合哪些人學習:1、學習型仿真工程師2、理工科院校學生3、對有限元分析感興趣的工程師你會得到什么:1、學習四連桿機構的三維模型處理2、學習四連桿機構接觸相關的接觸設置3、學習多體動力學分析步的建立4、學習四連桿機構多體動力學分析的載荷施加案例介紹:所使用軟件為ANSYS workbench2020r2.
2312
天空紀年xh ??? 1年前
Adams&Workbench&Matlab四連桿機構運動學分析 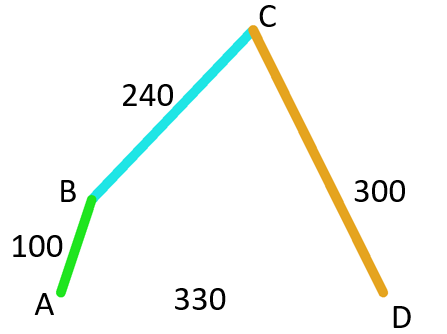
圖1為四連桿機構的基本尺寸長度,其中曲柄長度為100mm,連桿的長度為240mm,搖桿的長度為300mm。
2810
擺渡人張 ??? 2年前
269 基于matlab的四連桿機構動力學參數計算 
基于matlab的四連桿機構動力學參數計算。將抽油機簡化為4連桿機構,仿真出懸點的位移、速度、加速度、扭矩因數、游梁轉角等參數,并繪出圖形。程序已調通,可直接運行。
2210 1
matlab應用與學習 ??? 1年前
Matlab機械連桿機構運動學仿真:包含三桿滑塊機構\四桿\六桿 

詳細介紹了三桿滑塊機構和四桿機構運動方程的推導及matlab對上述機械連桿機構運動仿真,并實現機械連桿機構運動動畫的繪制,注:六桿機構無公式推導文本,只有代碼。如需模型推導說明文本及matlab源碼,請附件下載。
16
SimPC ??? 3年前
210基于matlab的仿真機械四連桿機構運動代碼 
基于matlab的仿真機械四連桿機構運動代碼,包括運動仿真和變量變化分析圖的生成,包括角速度、速度、加速度等曲線。程序已調通,可直接運行。
2297
matlab應用與學習 ??? 2年前
空間節點采用柱端加載,四個梁邊界條件該怎么設置呢?
空間節點采用柱端加載,四個梁邊界條件該怎么設置呢?是否需要把梁平面外的位移限制住?
1988 2 3
用戶_27739 ??? 2年前
懸架技術介紹上篇-傳統被動懸架 
多連桿懸掛結構相對復雜,材料成本、研發實驗成本以及制造成本遠高于其它類型的的懸掛、而且其占用空間大,中小型車出于成本和空間考慮極少使用這種懸掛。 下圖為五連桿獨立懸架,五根連桿分別指主控制臂、前置定位臂、后置定位臂、上臂和下臂,其中,主控制臂可以起到調整后輪前束的作用,以提高車輛行駛穩定性,有效降低輪胎的摩擦。
4665 1
EDC電驅未來 ??? 2年前
發動機引擎連桿表面怎樣去毛刺、除氧化皮研磨拋光? 
(四) 鍛造發動機活塞連桿配件研磨拋光鍛件的連桿強度要高于鑄鐵的連桿。鍛造后的連桿表面肯定是粗糙和不光滑的,因此去毛刺和氧化皮的拋光工藝是必要的。 通用的振動式研磨拋光機可以用來進行表面拋光處理。如果追求時間短,效率高,也可以使用離心式的研磨光飾機。只是機器購置成本要比振動機高一些。 研磨料也需要根據材質和工件的形狀大小不同進行匹配。
2173
jerrylu ??? 2年前
三自由度機械臂運動學分析+仿真 
其中,函數表達式如下: 式中,theta為關節變量;d為偏置距離;alpha為扭轉角;a為連桿長度;sigma表示關節類型(0為旋轉關節,1為移動關節);前四個參數分別對應表1中的,,,。
3992
余俊煒 ??? 2年前
DTAS 3D多約束裝配助力懸架公差分析&尺寸鏈計算:麥弗遜/雙叉臂/多連桿/H臂一網打盡 
DTAS 3D兩種建模思路可以解決以下懸架形式,麥弗遜、雙叉臂、三連桿、四連桿、五連桿、H臂等。麥弗遜前懸是經典的前懸形式,由于麥弗遜前懸的一些弊端,在麥弗遜的基礎上逐步衍生出了雙叉臂前懸等。將麥弗遜前懸的結構應用在后懸上為三連桿后懸,俗稱筷子懸架,其結構布置簡單,成本低廉。隨著對操控的要求越來越高,在三連桿的懸架形式上逐步發展出了四連桿(拖曳式刀臂懸架)、五連桿、H臂等懸架。
2554
DTAS棣拓尺寸公差分析及尺寸鏈計算 ??? 12月前
5種不常見的發動機,全見過的都是牛人! 
▲水平對置發動機(來源:世峰數字)轉子發動機屬于無活塞回旋式四行程內燃機的一種,膨脹壓力作用在轉子的側面。▲轉子發動機轉子發動機殼體的內部空間(或旋輪線室)被分成三個工作室。在轉子的運動過程中,這三個工作室的容積不停地變動,在擺線形缸體內相繼完成進氣、壓縮、燃燒和排氣四個過程。
2507
技成電工課堂 ??? 4年前
第三課 Matlab HSV等四種圖片顏色空間的轉化 
本課程適用于想學或想進行matlab做圖像處理的同學們,課程包含操作實現讀取圖片,將圖片轉換為RGB、YCbCr、Lab、HSV四種顏色空間并相應顯示,相應大家可以通過學習拓展到圖像分析的應用上,希望能長久的和大家一起學習進步。每一期視頻都會上傳相應的可運行的源碼附件。
29
胖子愛學習 ??? 7年前
基于Ansys Twin Builder連桿結構數字孿生體建模關鍵技術及應用 
因此建立機械產品關鍵零部件(如連桿)的數字孿生體模型,就具有十分重要的意義。圖1為實現連桿數字孿生體模型的技術路線,主要分為載荷識別、模型降階和數字孿生體模型建立和部署四部分。
2565 2
上海安世亞太 ??? 4年前
ANSYS Workbench連桿瞬態動力學仿真 
</p><p>當給定幅值衰減因子后,其余的四個參數隨之而定,分別是:</p><p>或者可寫為:</p><p>5.2 連桿瞬態動力學仿真</p><p>5.2.1 模型導入</p><p>完成連桿的三維模型后,在另存為類型中選擇step格式,這是通用的CAD數據交換格式,可以被大多數工程軟件所接受,并將模型導出step格式導入到ansys workbench中。
3407 3
力學AI有限元 ??? 12月前
基于精準碰撞檢測算法的機械臂避障軌跡規劃 
機械臂與障礙物模型簡化首先,對機器人進行建模,為保證研究具有一般性,本文采用被廣泛應用的兩連桿六自由度的串聯機械臂為研究對象,由1個腰關節、1個肩關節、3個腕關節組成。其中四、五、六關節垂線相互垂直且交與同一點 [16],共同決定了末端執行器的姿態,其中圖1為機械臂腕部結構運動簡圖;圖2為機械臂連桿坐標簡圖。機械臂具體的D-H參數變量如表1。
3495 6 3
機械設計師 ??? 4年前
3DCC V7.0 視頻演示(三)|汽車多連桿懸架裝配約束功能 
在 3DCC V7.0 面向汽車典型工程場景的能力升級中,多連桿懸架成為重點覆蓋對象之一。本期功能更新,3DCC 正式新增多連桿(四連桿)后懸架場景的專用裝配約束能力。 多連桿懸架結構復雜、連桿數量多、運動關系耦合度高,是整車底盤系統中典型的高自由度裝配場景。
2408
笑酒仙 ??? 3月前
工業機器人精度測量方案-激光跟蹤儀 
標定時,通過機器人的連桿理論長度、各關節旋轉方向、機器人零點狀態、各關節理論減速比這四項參數建立機器人理論運動學模型,讓機器人運行30-50個關節角坐標點位,激光跟蹤儀記錄機器人法蘭盤末端坐標。
2819
深圳市中圖儀器股份有限公司 ??? 3年前
五自由度機械臂運動學分析(三轉動+兩移動自由度) 
其中,函數表達式如下:式中,theta為關節變量;d為偏置距離;alpha為扭轉角;a為連桿長度;sigma表示關節類型(0為旋轉關節,1為移動關節);前四個參數分別對應表1中的,,,。
3035
余俊煒 ??? 3年前
SPERRE空壓機故障分析 
某輪空壓機,值班期間檢查發現四 號空壓機聲音異常,低壓端不能正常打氣,高壓端打氣正常,隨即把空壓機停掉,吊低壓端缸蓋發現活塞有裂紋,拆下低壓端缸套,發現缸套布油正常活塞環活動正常,活塞銷小端斷裂,曲拐箱正常,連桿大端軸向串量正常滾珠軸承正常,潤滑情況正常,機油質量未發現大量鐵粉,機油更換正常,油位正常,夏天機艙溫度升高,額外加了兩臺軸流風機吹風。
2511 6 2
雙螺桿泵 ??? 2年前
基于ADAMS的點按手法運動仿真 
Denavit和Hartenberg提出了一種描述機器人手臂連桿之間運動關系的方法,用連桿長度ai、連桿轉角αi、連桿偏距di及關節角θi這4個參數來描述機器人手臂連桿之間的運動關系。機器人手臂中建立坐標系的步驟:(1)找出各關節軸,并標出這些軸線的延長線。在下述步驟(2)~步驟(5),僅考慮兩個相鄰的軸線。
3011 2
擺渡人張 ??? 2年前
20條/頁 
 88
88 跳至頁

技術鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP
