



無人機集群自組織搜索仿真模型設(shè)計與實現(xiàn) 
摘要:城市威脅背景下無人機集群自組織搜索移動目標問題,是無人機集群作戰(zhàn)應(yīng)用的一個重要發(fā)展方向。采用基于Agent的復雜系統(tǒng)建模仿真工具,構(gòu)建了無人機集群搜索仿真模型框架,設(shè)計實現(xiàn)了無人機集群自組織搜索模型。在考慮無人機集群作戰(zhàn)可能受到威脅的背景下,展示了無人機集群自組織搜索概念,探索了使用基于概率的有限狀態(tài)機模型實現(xiàn)集群自主決策的解決方案,并通過案例進行了分析驗證。
2064 1
龍騰AI技術(shù) ??? 3年前
無人機集群如何從理論“飛進”現(xiàn)實 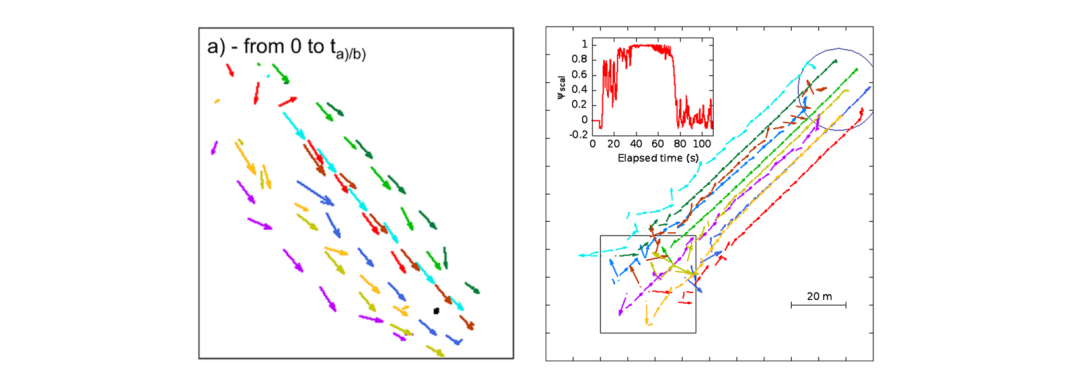
由于傳統(tǒng)單機作業(yè)的局限性,無人機集群受到了越來越多的關(guān)注,研究人員開始探索如何讓無人機集群像自然界生物群體一樣高效自主的完成特定任務(wù),從而設(shè)計出各式各樣的集群算法。
2501
看航空 ??? 3年前
209基于matlab的無人機路徑規(guī)劃
法(CPFIBA)。輸出距 
基于matlab的無人機路徑規(guī)劃,包括2D路徑和3D路徑,三種優(yōu)化算法,分別是蝙蝠算法(BA)、蝙蝠算法融合差分進化算法(DEBA)、結(jié)合人工勢場方法的改進混沌蝙蝠算法(CPFIBA)。輸出距離迭代曲線和規(guī)劃的路徑。程序已調(diào)通,可直接運行。
2550
matlab應(yīng)用與學習 ??? 2年前
性能提升45%---無人機航拍攝像建模臺式、便攜式、集群配置方案23v4 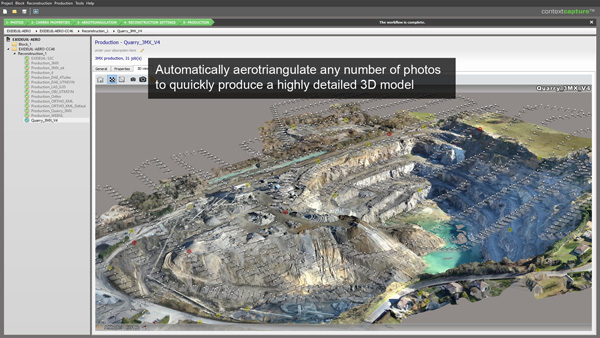
目錄(一).高速傾斜攝影建模工作站硬件配置推薦(二).移動/便攜傾斜攝影建模工作站硬件配置(單屏/三屏)(三).衛(wèi)星/航空影像/雷達點云/無人機航拍影像處理建模集群配置推薦23v4期方案的技術(shù)特點:(1)采用intel 14代超頻處理器(8核@5.8GHz)+RTX40系列GPU卡硬件架構(gòu),(2)對整機的超頻+系統(tǒng)優(yōu)化+低延遲等,性能進一步提升(3)對多機超頻集群的每一個環(huán)節(jié)
4254 4 2
UltraLAB ??? 2年前
208基于matlab的多目標遺傳算法的無人機航路規(guī)劃 
基于matlab的多目標遺傳算法的無人機航路規(guī)劃。在三維航路中進行航路代價估計,綜合考慮路徑長度、隱蔽性、危險度,規(guī)劃出最優(yōu)路徑。輸出3D規(guī)劃路徑。程序已調(diào)通,可直接運行。
2301
matlab應(yīng)用與學習 ??? 2年前
“空地一體” 蜂巢航宇“集群智能”技術(shù) 
路徑規(guī)劃技術(shù)無人機在實際飛行中如果存在突發(fā)狀況,必須進行航跡重新規(guī)劃,以規(guī)避危險。為滿足協(xié)同工作時效性,重新規(guī)劃所采用的算法必須具有實時、高效的特點。蜂巢航宇無人機可以根據(jù)集群算法領(lǐng)域搜索的特點,以參考航跡的突發(fā)危險作為領(lǐng)群航跡,在突發(fā)危險段進行領(lǐng)域搜索,而不需要對整條航跡進行修改,由此可以快速獲得需要修正的航跡段,并替換原突發(fā)危險航跡段。
2466 1
無人機10086 ??? 3年前
海戰(zhàn)場無人作戰(zhàn)體系協(xié)同運用與指揮控制設(shè)想 
3)無人集群任務(wù)規(guī)劃與智能化決策控制技術(shù)無人集群的任務(wù)規(guī)劃主要包括路徑、時序、策略、載荷規(guī)劃,在海上作戰(zhàn)中,作戰(zhàn)指揮系統(tǒng)及無人平臺戰(zhàn)術(shù)指控系統(tǒng)主要關(guān)注無人集群的協(xié)同情報偵察、分布火力打擊、協(xié)同突防等任務(wù)的行動路徑及協(xié)同策略規(guī)劃。
4727 1 1
無人機圈 ??? 3年前
無人駕駛車輛MPC局部路徑規(guī)劃+軌跡跟蹤全集 

無人駕駛車輛局部路徑規(guī)劃+軌跡跟蹤Carsim配置流程+代碼講解。
1782
愛足球的技術(shù)宅 ??? 4年前
206基于matlab的無人機航跡規(guī)劃(UAV track plannin) 
基于matlab的無人機航跡規(guī)劃(UAV track plannin)。
2332
matlab應(yīng)用與學習 ??? 2年前
著眼于戰(zhàn)場的巡飛器集群察打一體應(yīng)用 
、目標智能識別、目標檢測定位、多無人機集群編隊、多無人機協(xié)同航跡規(guī)劃、動態(tài)任務(wù)分配及組網(wǎng)鏈路傳輸?shù)刃袠I(yè)前沿技術(shù),將無人機集群業(yè)務(wù)推動至系統(tǒng)化、智能化、實戰(zhàn)化。
2644
無人機10086 ??? 4年前
星邏馭光 | 無人機賦能西氣東輸管線巡檢 
同時,星邏智能利用“祺云”無人機綜合操作系統(tǒng),實現(xiàn)了對無人機和機庫的集群調(diào)度,通過在線規(guī)劃任務(wù)路徑,讓無人機從機庫一鍵起飛,自動巡檢目標區(qū)域并進行信息采集,通過搭載雙光相機,實時推送視頻流至后臺指揮中心,不論白天黑夜皆能洞察每一次變化。
2169
無人機10086 ??? 4年前
無人系統(tǒng)群體智能及其研究進展 
(2)無人系統(tǒng)群體智能無人系統(tǒng)群體智能是指由眾多相對自主、人工研發(fā)的無人自主運動體通過相互協(xié)作與分工涌現(xiàn)出復雜智能行為的特性. 無人機集群、無人艇集群、無人坦克集群和工業(yè)智能機器人集群等是其目前階段的典型實例,多顆不同能力的衛(wèi)星也可組成衛(wèi)星集群的群體智能,跨域異構(gòu)無人集群進一步呈現(xiàn)出更為復雜的無人系統(tǒng)群體智能形態(tài)。
2194
龍騰AI技術(shù) ??? 3年前
無人系統(tǒng)在戰(zhàn)場上的應(yīng)用現(xiàn)狀和前景 
美國計劃在2030年前利用高超音速無人機,形成應(yīng)對復雜局勢的即時反應(yīng)能力。美國高層認為,從2030年起,將按照如下發(fā)展路徑全方位提高無人系統(tǒng)的技戰(zhàn)術(shù)能力: 首先,提升空中、空天、地面和海上無人系統(tǒng)作戰(zhàn)范圍和動態(tài)態(tài)勢應(yīng)變能力,以及在不同環(huán)境中的新興混合型無人集群系統(tǒng)的實戰(zhàn)能力。 其次,到2035年,美國計劃建立一個高速自動化通信網(wǎng)絡(luò),可以將無人系統(tǒng)整合到統(tǒng)一的信息空間。
3961 3 3
無人機10086 ??? 2年前
淺析無人機的自主與智能控制 
第二等級是完成小組特定的工作,定義為“高品質(zhì)的工作”:能夠?qū)崿F(xiàn)四維導航,實現(xiàn)態(tài)勢感知與認知;能夠?qū)崿F(xiàn)路徑規(guī)劃與重規(guī)劃;任務(wù)規(guī)劃與重規(guī)劃;無意識信息的認知。 第三等級是實現(xiàn)機群協(xié)同任務(wù),定義為“為集體使命高效工作”:編隊飛行;有人/無人協(xié)同作戰(zhàn);群體感知與態(tài)勢共享;集群聯(lián)合作戰(zhàn)。
2629
無人機10086 ??? 3年前
無人機未來發(fā)展趨勢
政策體系正在形成 “規(guī)劃 - 基建 - 標準 - 應(yīng)用” 的推進路徑,從中央到地方加強政策供給,完善制度框架。 低空空域管理改革深化:2025 年,低空空域管理改革將進一步深化,全域低空空域協(xié)同運行管理的技術(shù)和制度保障體系逐步構(gòu)建,為無人機的廣泛應(yīng)用提供更加廣闊的空間。人才需求增加 隨著低空經(jīng)濟的快速發(fā)展,無人機行業(yè)對高素質(zhì)人才的需求日益增加。
1178
用戶_87082 ??? 12月前
多旋翼無人機的振動實驗和仿真分析 
關(guān)鍵詞:多旋翼無人機;結(jié)構(gòu)振動;低頻;扭轉(zhuǎn)模態(tài);彎曲模態(tài);現(xiàn)在無人機系統(tǒng)正朝著提高無人機自主能力方向發(fā)展,主要集中在提高其智能化水平上,如環(huán)境感知[1]、規(guī)劃[2,3]和控制[4]等,但是對于無人機結(jié)構(gòu)本身關(guān)注的不太多。作為下一代新型交通工具的候選者,多旋翼無人機的安全性和乘坐舒適性無疑是至關(guān)重要的,因此,對無人機振動帶來結(jié)構(gòu)性損壞以及噪聲影響也應(yīng)該得到更加廣泛關(guān)注。
5854 7 2
無人機圈 ??? 2年前
我國民用無人機產(chǎn)業(yè)發(fā)展與展望 
民用無人機企業(yè)在珠三角、長三角、京津冀、成渝等區(qū)域?qū)崿F(xiàn)集群式發(fā)展,顯示出強勁的發(fā)展動能和巨大的產(chǎn)業(yè)活力。
1917
航發(fā)設(shè)計 ??? 4年前
美國研發(fā)軍用無人機蜂群新用途:快速繪出戰(zhàn)場3D地圖 
【環(huán)球網(wǎng)無人機 記者 趙汗青】國外“今日物聯(lián)網(wǎng)世界”(IoT World Today)網(wǎng)站8月25日稱,美國國防軟件公司Reveal Technology和軍用無人機制造商lTeal Drones 已聯(lián)手將Reveal的“遠見”(Farsight)測繪軟件和Teal的新型4架無人機集群結(jié)合起來,以實時生成3D戰(zhàn)場地圖。
2111
無人機10086 ??? 3年前
世界無人艇技術(shù)研發(fā)動態(tài)與作戰(zhàn)使用分析 
2020年8月,美國海軍在弗吉尼亞州詹姆斯河上進行了一次“蜂群”作戰(zhàn)演示,共有13艘無人艇參加,它們在收到直升機提供的威脅報警后,依托雷達和紅外傳感器探測目標,以集群作戰(zhàn)模式完成了一系列復雜動作,實施了對“入侵目標”的包圍和攔截,成功完成了護航作戰(zhàn)任務(wù)。
2293
海工 ??? 3年前
光伏巡檢3.0時代,無人機還可以做什么? 
場站建模與ID組串分割 星邏馭光作為一款獨立軟件,實現(xiàn)了與無人機機庫解耦,無人機可承載軟件進行日常巡檢 ,工作人員通過Web/Pad多種形式可視化調(diào)度及管理終端進行多航線任務(wù)規(guī)劃,實現(xiàn)無人機的一鍵起飛和遠程調(diào)度,無人機可實現(xiàn)自動飛行、自主避障、斷電續(xù)飛、5G聯(lián)網(wǎng)等功能,無需現(xiàn)場操作即可知悉光伏電站狀態(tài),效率相比于人力提升10倍
2339
無人機10086 ??? 4年前
20條/頁 
 23
23 跳至頁

技術(shù)鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP
