



傾轉(zhuǎn)旋翼無人機流場仿真,基于fluent重疊網(wǎng)格制作(含全部幾何模型、網(wǎng)格及計算文件和全程錄屏教程) 
本文針對這一難題提供了仿真方面的解決途徑,下面展示的是基于fluent重疊網(wǎng)格制作的傾轉(zhuǎn)旋翼無人機算例,內(nèi)容包含了幾何模型文件、網(wǎng)格文件和全部計算所需文件,還錄制了全程操作視頻可供學(xué)員跟著視頻逐步學(xué)習(xí)。
3772 10 4
laplacianFoam ??? 3年前
基于SCDM+FM+Fluent的bellbat傾轉(zhuǎn)旋翼機旋翼傾轉(zhuǎn)過程氣動仿真 

采用了貝爾的傾轉(zhuǎn)旋翼戰(zhàn)斗機概念模型,進行傾轉(zhuǎn)旋翼的氣動仿真。傾轉(zhuǎn)旋翼飛行器旋翼轉(zhuǎn)速600RPM,主旋翼從水平狀態(tài)往垂直狀態(tài)進行傾轉(zhuǎn),傾轉(zhuǎn)速度15rpm,計算旋翼傾轉(zhuǎn)過程的瞬態(tài)過程。可以獲取傾轉(zhuǎn)過程中的旋翼拉力,下洗速度、機身壓力分布等各種數(shù)據(jù)。
886 5
無人機工坊 ??? 1年前
基于全多面體網(wǎng)格的無人機復(fù)雜裝配體流場建模——Fluent Meshing精細劃分技術(shù)實踐 
特別適合無人機設(shè)計工程師快速掌握復(fù)雜氣動外形的工業(yè)級網(wǎng)格生成策略、CFD工程師學(xué)習(xí)多物理場仿真的網(wǎng)格適應(yīng)性優(yōu)化方法,以及航空航天領(lǐng)域研究人員構(gòu)建高升力構(gòu)型數(shù)值模擬的技術(shù)框架。 ?1 導(dǎo)入幾何模型 在固定翼無人機流場仿真中,Fluent Meshing的網(wǎng)格劃分流程始于幾何模型的預(yù)處理階段。
4654 26 7
工科小師妹 ??? 10月前
傾轉(zhuǎn)旋翼機復(fù)合材料機翼動特性仿真分析 
Sprangers,C.A等進行V-22傾轉(zhuǎn)旋翼機機翼仿真(如圖1)分析,并通過振動試驗研究對仿真結(jié)果進行了驗證,提高了全尺寸機翼研制設(shè)計把握。諸多研究證明了復(fù)合材料機翼結(jié)構(gòu)設(shè)計在傾轉(zhuǎn)旋翼機研制中具有重要的工程意義。 基于有限元方法分析了傾轉(zhuǎn)旋翼機復(fù)合材料機翼動特性,通過文獻測試結(jié)果驗證了有限元分析結(jié)果的準確性和建立的機翼模型可信度。
4828 7 1
我愛飛機 ??? 2年前
基于重疊(嵌套)網(wǎng)格方法的直升機旋翼懸停流場數(shù)值仿真(數(shù)值仿真結(jié)果與試驗結(jié)果進行了對比驗證) 
4.本課程詳細介紹了重疊網(wǎng)格的方法,以及重疊網(wǎng)格方法是怎么在直升機旋翼流場中應(yīng)用的,可以幫助初學(xué)者掌握重疊網(wǎng)格方法的應(yīng)用。5.本課程對Star ccm軟件的求解設(shè)置進行了講解,從而幫助初學(xué)者了解Star ccm的求解設(shè)置過程。6.本課程對Star ccm軟件的后處理功能進行了講解,可以幫助初學(xué)者了解如何獲得衍射零部件、旋翼表面的壓力系數(shù)以及動畫生成等后處理功能。
6281 8
朱亞男 ??? 3年前
Workbench fluent風(fēng)力發(fā)電機組葉片流場及溫度場仿真,附詳解視頻及原模型 
本案例文檔,適合本科畢業(yè)設(shè)計水平,具有極高參考價值,請合理使用文檔。本文檔提供基于ANSYS的風(fēng)力發(fā)電機組溫度場仿真全流程指南,涵蓋幾何處理、網(wǎng)格劃分、求解設(shè)置及后處理等核心環(huán)節(jié),結(jié)合實用技巧與問題解決方案,助力用戶高效完成熱場分析,支撐機組熱管理設(shè)計與性能優(yōu)化。請使用全英文路徑完成整個流程。 1.
6800 32 12
孫一凡仿真 ??? 1年前
基于SCDM+Fluent Meshing+ Fluent的多旋翼無人機螺旋槳單向流固耦合的仿真 
本視頻從實際工程應(yīng)用出發(fā),在Workbench環(huán)境中進行無人機螺旋槳的單向流固耦合分析(FSI)。主要包括兩個部分CFD氣動計算模塊和CAE結(jié)構(gòu)分析模塊;CFD氣動計算模塊包括以下內(nèi)容:從模型處理,到Fluent Meshing網(wǎng)格劃分,再到fluent設(shè)置和結(jié)果后處理,詳細介紹無人機螺旋槳/旋翼的仿真過程(MRF方法),可以準確的得到指定轉(zhuǎn)速下,無人機螺旋槳的拉力、扭矩、下洗流場等。
1005
無人機工坊 ??? 1年前
Fluent實用案例 | FMG帶偏流板艦載機尾流場仿真 
本案例利用Fluent以文章中所采用的發(fā)動機噴管模型甲板上艦載機尾流場仿真。在航空母艦上,艦載機尾部通常會部署偏流板。因此本案例以雙發(fā)、帶偏流板為計算模型,展開了艦載機尾流場仿真。依據(jù)本案例,后續(xù)可以開展不同距離、不同角度、不同甲板風(fēng)情況下的尾流場仿真計算。
2615 1
CFD仿真庫 ??? 8月前
基于重疊網(wǎng)格方法的直升機旋翼前飛變距流場數(shù)值仿真(周期變距) 
四、周期變距的設(shè)置,包括:旋翼運動的講解;公式的編寫;五、starccm瞬態(tài)求解的設(shè)置,包括:網(wǎng)格的導(dǎo)入湍流模型的選擇和設(shè)置;計算域的運動指定和邊界條件設(shè)置;重疊網(wǎng)格的設(shè)置;網(wǎng)格預(yù)覽;求解設(shè)置等動畫的設(shè)置等;旋翼扭矩和升力參數(shù)的監(jiān)測;六、結(jié)果后處理求解數(shù)據(jù)分析和講解;壓力云圖動畫的展示;
3586 7
朱亞男 ??? 3年前
基于icem+fluent多旋翼無人機氣動仿真 
本課程從模型處理,到icem劃分網(wǎng)格,再到fluent設(shè)置,結(jié)果后處理,詳細介紹多旋翼無人機的氣動仿真過程,可以準確的得到指定轉(zhuǎn)速,指定速度情況下,多旋翼無人機的流場情況以及氣動力情況!包括拉力,扭矩,功率,力效等,以及速度、壓力云圖,下洗流場情況等。(本視頻采用的是瞬態(tài)滑移網(wǎng)格的形式進行的計算)(/無人機仿真/無人機流場仿真/飛行器仿真/多軸仿真)有疑問和建議隨時交流,共同進步!
5528 184
湍流實驗室 ??? 8年前
Fluent實用案例 | 重疊網(wǎng)格UDF撲翼機氣動仿真 
本案例利用Fluent重疊網(wǎng)格與UDF,對撲翼機的氣動特性展開仿真。該案例所用模型為假設(shè)模型,僅作計算設(shè)置參考。通過此案例后續(xù)可以對進一步添加udf代碼與更換模型,實現(xiàn)更為復(fù)雜的撲翼機運動,對其展開氣動仿真計算。1 UDF說明在本研究中采用重疊網(wǎng)格模型對撲翼機撲翼運動進行模擬。
2691 2 1
CFD仿真庫 ??? 8月前
基于Workbench-Fluent的四旋翼無人機流場分析,免費無聲音,操作細致,附件練習(xí)(需購買) 
本視頻為基于Workbench-Fluent的四旋翼無人機流場分析,免費無聲音,操作細致,附件練習(xí)(需購買),主要涉及到外流場的設(shè)置,網(wǎng)格劃分,簡單的動網(wǎng)格設(shè)置,CFD-POST后處理,歡迎購買討論學(xué)習(xí)。
369 5
兵荒馬亂 ??? 5年前
風(fēng)干擾下傾轉(zhuǎn)旋翼飛行器直升機模態(tài)預(yù)設(shè)性能跟蹤控制 
4 仿真結(jié)果及分析 接下來為了驗證本文方法的有效性,以XV-15為對象進行了仿真分析。XV-15 傾轉(zhuǎn)旋翼機的參數(shù):質(zhì)量 ;慣性矩以及慣性積分別為 , , , ;大氣密度為 。
2695 1
我愛飛機 ??? 2年前
通過 CFD 仿真延長四旋翼無人機的飛行時間和范圍 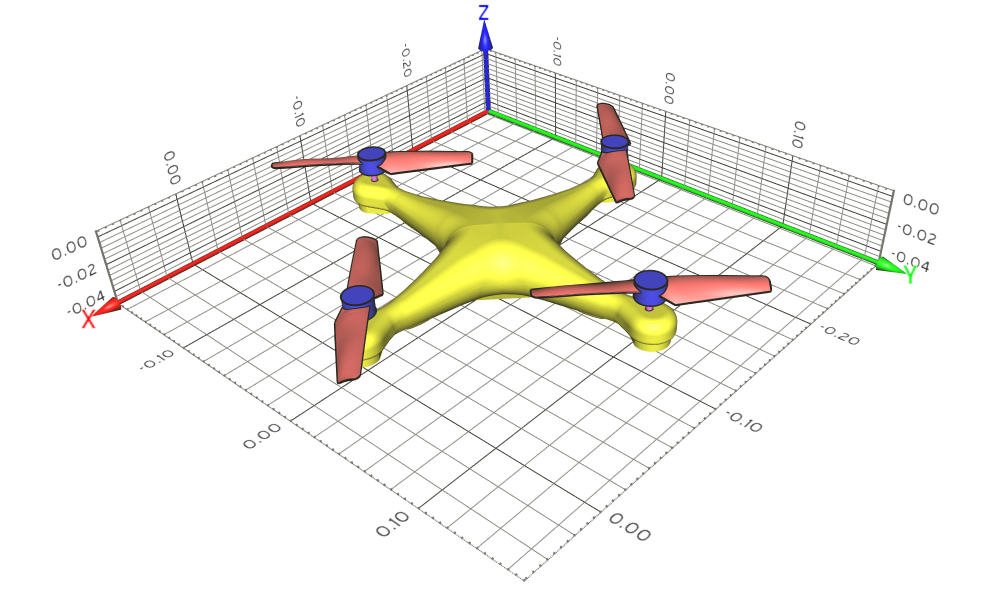
仿真結(jié)果揭示了流場中的強烈不穩(wěn)定特征。機身上的壓力分布在很大程度上受到螺旋槳瞬時位置的影響,無人機周圍的速度場受到與轉(zhuǎn)子旋轉(zhuǎn)相關(guān)的強烈周期性振蕩的影響。
3159 4 2
Cadence CFD學(xué)習(xí) ??? 3年前
CFD專欄丨四旋翼無人機空氣動力學(xué)仿真 
1 四旋翼無人機的空氣動力學(xué)仿真 以往有不少采用傳統(tǒng)NS方程的流體求解器來分析無人機的空氣動力學(xué)問題,但是普遍會遇到如下問題: 計算效率不高:由于外流場的模型網(wǎng)格數(shù)量巨大,
4480 5 3
ALTAIR ??? 2年前
Fluent 護衛(wèi)艦直升機迫降性能仿真 
本案例利用Fluent的RBM模型,對護衛(wèi)艦直升機迫降模型氣動性能問題進行了仿真計算。該案例以NACA0012和SFS2標準模型展開相關(guān)計算,因為艦船模型為100:1縮比模型,僅考慮航速為2m/s,直升機旋翼轉(zhuǎn)速為251.2rad/s,降落速度為2m/s的仿真工況。大部分設(shè)置與Fluent 護衛(wèi)艦直升機懸停性能仿真(一)一致,若已經(jīng)了解上個案例的讀者可以直接查看4.3中的設(shè)置。
2492 1
CFD仿真庫 ??? 12月前
一種變軸螺旋槳水空跨域無人航行器設(shè)計和控制技術(shù) 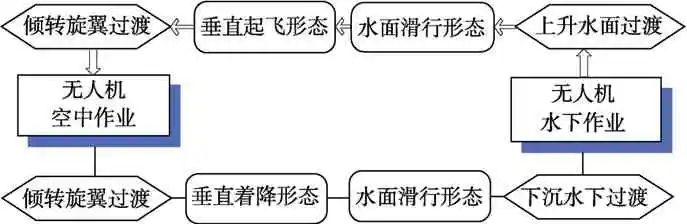
圖13 帶有干擾補償?shù)母┭鼋穷A(yù)測控制流程Fig.13 Pitch angle prediction control process with interference compensation 4.3 可傾轉(zhuǎn)螺旋槳無人機過渡狀態(tài)的高度控制 可傾轉(zhuǎn)旋翼無人機在整個傾轉(zhuǎn)過渡過程中,旋翼為主維持升力狀態(tài)飛行時,旋翼傾轉(zhuǎn)角度小但前飛速度小;而機翼為主維持升力狀態(tài)飛行時,旋翼傾轉(zhuǎn)角度大,在前飛速度不足的情況下則機翼升力
6360 1 2
aero-engine ??? 2年前
#292-ANSYS WORKBENCH流固耦合案例-螺桿擠出機(泵)流場/受力仿真手把手教程 
WORKBENCH流固耦合案例#292-螺桿(單)擠出機流場和應(yīng)力仿真案例介紹及基本結(jié)果圖如圖所示的螺桿(單)擠出機,擠出量可以設(shè)定為800kgh,螺桿轉(zhuǎn)速340rpm,物料密度700kg/m3,粘度1620Pa.s,物料含水率為30%,要模擬此過程中的流場和螺桿應(yīng)力分布。
791
仿真助手 ??? 5年前
2026 R1 | Ansys流體仿真專題網(wǎng)絡(luò)研討會上線(共7場) 
相較于傳統(tǒng)CFD仿真工具,Ansys Forte提供強大的自動化動網(wǎng)格、間隙控制模型、內(nèi)置閥門流固耦合仿真等行業(yè)專用仿真功能,解決各類容積式壓縮機、油泵、內(nèi)燃機等復(fù)雜運動問題仿真的痛點問題。
1187
Ansys中國 ??? 1月前
案例分享|復(fù)雜仿真應(yīng)用定制——UAVSim無人機仿真APP 
其低代碼開發(fā)能力,可面向復(fù)雜裝備、中小企業(yè)專用仿真場景,快速開發(fā)定制仿真應(yīng)用。 本文將通過“UAVSim無人機仿真APP”案例,帶您深入了解「神工坊」團隊,如何基于「SimForge HSF」,針對具體場景開發(fā)垂直應(yīng)用,使產(chǎn)品經(jīng)理也可上手操作無人機數(shù)值仿真。一、客戶需求分析 1.
1489
神工坊(高性能仿真) ??? 4月前
20條/頁 
 54
54 跳至頁

技術(shù)鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓(xùn)客服
- 平臺客服
TOP
