



Comsol多體動力學剛柔耦合仿真方法 
Comsol基礎的運動副(關節)包括: 棱柱關節、鉸鏈關節、圓柱關節、螺紋關節、平面關節、球關節、槽關節、約化槽關節、萬向接頭、距離關節等。
6329 6
精品課程推薦 ??? 1年前
設計仿真 | 直播預告-Marc 仿真助力醫學醫療研發創新 
有限元分析法具有建模準確、逼真、良好的可操作性及可重復性等優點,自上世紀70年代起就應用于醫療骨科領域,不僅能改進骨科內固定材料的選擇,在關節假體的生物力學特性分析方面也起到了重要作用。
2127
海克斯康設計與仿真 ??? 3年前
三自由度機械臂運動學分析+仿真 
建立坐標系 1正運動學分析 采用標準的D-h法進行機械腿模型分析: 將連桿坐標系的原點建立在連桿的關節連桿末端。 一、建立D-H連桿坐標系的原則 1.Z,軸沿關節軸i+1的軸向。 2.原點O為Zi.,與Zi軸的交點或其公垂線與關節軸Zi的交點。3.Xi軸沿Zi與Zi軸的公垂線方向,由關節軸i指向關節軸i+1。
3993
余俊煒 ??? 2年前
六軸碼垛機器人admas正逆運動學仿真 
完成機器人的運動學逆解后需要對求出的各個關節的角度再進行仿真驗證。
2373
余俊煒 ??? 3年前
戴西CAxWorks.VPG車輛工程仿真軟件|假人+座椅雙調整 汽車仿真效率直接拉滿 
3多關節聯動旋轉調整骨盆傾角時,脊柱、頭頸、上肢自動跟隨重新定向,保持整體姿態的生物力學一致性。4實時穿透檢測調整過程中自動檢測假人與周邊結構的干涉區域,配合自動修正算法調整不合理干涉。
1380
工程師小戴 ??? 1月前
戴西CAxWorks.VPG車輛工程仿真軟件|假人+座椅雙調整 汽車仿真效率直接拉滿
3多關節聯動旋轉調整骨盆傾角時,脊柱、頭頸、上肢自動跟隨重新定向,保持整體姿態的生物力學一致性。4實時穿透檢測調整過程中自動檢測假人與周邊結構的干涉區域,配合自動修正算法調整不合理干涉。
2066 1
工程師小戴 ??? 1月前
基于ADAMS的點按手法運動仿真 
摘 要:為研究中醫按摩點按手法在機器人手臂上的實現,基于ADAMS虛擬建模的方法進行機器人手臂的運動學分析,研究在六自由度機器人手臂上實現點按手法時各個關節的運動學相關數據。仿真結果表明,在六自由度機器人手臂上能夠很好地實現點按手法,并能得到每個關節的關節角隨時間的運動曲線和相關數據。
3011 2
擺渡人張 ??? 2年前
六軸機械臂(帶抓手)運動學分析+軌跡規劃 
驗證了正運動學方程的正確性。
5213 1
余俊煒 ??? 2年前
五自由度機械臂運動學分析(三轉動+兩移動自由度) 
正運動學分析根據D-H表規定得到如下變換矩陣為:由此可得機器人相鄰兩關節位姿分別為:所以,坐標系{4}相對于基坐標系的變換矩陣為:相對于基坐標系的旋轉矩陣 位置矢量根據DH參數求解變換矩陣的函數trans:%輸入JD,即6個關節變量的值,求解正運動方程function
3035
余俊煒 ??? 3年前
matlab調姿機構動力學?
具體要求 調姿機構如圖 1所示,已根據結構進行簡化,推導出基于拉格朗日方程的動力學工程,麻煩檢查一下結構簡化是否合理,動力學方程推導是否正確,然后將機器人關節誤差(摩擦力、外部擾動、關節間隙、關節減速器誤差)融入動力學模型形成新的動力學方程,編寫相關程序,務必進行校核。
2436 5
用戶_50729 ??? 1年前
碼垛機器人admas仿真 
機器人動力學仿真按照運動學仿真的類似步驟為機器人添加材料、運動副和關節驅動,給機器人手腕末端施加50N最大負載,仿真模型如圖5-17。
2276
余俊煒 ??? 3年前
[機器人學習]-樹莓派6R機械臂運動學分析 ![[機器人學習]-樹莓派6R機械臂運動學分析](https://img.jishulink.com/msimage/202212/724f9dd4ed1679d29341729d06ff291c.png?image_process=resize,fw_294,fh_172,)
正運動學分析根據D-H表規定得到如下變換矩陣為:由此可得機器人相鄰兩關節位姿分別為:所以,坐標系{4}相對于基坐標系的變換矩陣為:相對于基坐標系的旋轉矩陣 位置矢量根據DH參數求解變換矩陣的函數trans:%輸入JD,即6個關節變量的值,求解正運動方程function [ T ] = trans
2561 1
余俊煒 ??? 3年前
RecurDyn機器人仿真應用及核心技術路線詳解 
正運動學的目標是:利用逆運動學得到的關節角度作為輸入,進一步計算機器人各關節運動所需的力。
2383 1
杭州擬創(RecurDyn原廠) ??? 4月前
工業機器人精度測量方案-激光跟蹤儀 
標定時,通過機器人的連桿理論長度、各關節旋轉方向、機器人零點狀態、各關節理論減速比這四項參數建立機器人理論運動學模型,讓機器人運行30-50個關節角坐標點位,激光跟蹤儀記錄機器人法蘭盤末端坐標。
2819
深圳市中圖儀器股份有限公司 ??? 3年前
基于DeltaD打印機的剛柔耦合運動學分析 
為保證模型從初始位置進行運動,將仿真時各關節的角位移設置如下:θ2=time+0.41;θ3=time+1.57;a4=time.從而可得其驅動角位移曲線如圖3所示.將各轉角位移帶入運動學方程,利用Matlab求解可得其動平臺末端質心的位移曲線如圖4所示.3 Adams和Hypermesh剛柔耦合運動學分析將三維模型導入到Adams中并按照其運動關系在各關節加入對應的約束副
4398 3
擺渡人張 ??? 2年前
設計仿真 | AI+仿真雙驅動!海克斯康領跑人形機器人研發 
海克斯康工業軟件在人形機器人的主要應用點如下:01運動學、動力學仿真及載荷計算Adams軟件能夠對人形機器人進行精確的運動學仿真,包括關節運動、步態規劃及平衡控制仿真等。通過建立人形機器人的多體動力學模型,研發人員可以詳細分析各關節的運動軌跡、速度和加速度,優化機器人的行走步態和動作流程,確保其運動的平穩性和靈活性。
3242 1 1
海克斯康設計與仿真 ??? 1年前
通過仿真分析汽車的換擋原理 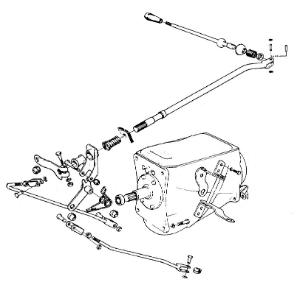
使用 COMSOL 軟件模擬換擋機構 為了回答這些問題,我們選擇使用 COMSOL 多體動力學和結構力學模塊進行仿真,其中多體動力學模塊提供了預定義的功能,可用于定義各部件之間不同類型的關節。 多體動力學模塊 擴展了 COMSOL Multiphysics 和 結構力學模塊 的功能,使我們能夠對機械裝配體進行建模。
2457 6 1
仿真客 ??? 2年前
Ansys 案例研究 | GoPro 相機諧波分析與減振優化 
過大的變形量無法滿足設計要求,因此將為關節增設阻尼,以改善結構動力學性能。 圖 4 變形頻率響應提取設置 圖 5 Z 向變形頻率響應7、為關節增加阻尼并重新開展仿真計算。返回 Workbench 平臺,復制諧響應分析系統。在新分析項目中,為兩個旋轉關節統一賦予阻尼值:100 N?mm?s/rad,之后重新求解計算。
1027
JXKJ ??? 19天前
為什么最好的機械臂是7個自由度而不是6個? 
直到最近看到知乎上的一個問題:人的手臂(腕關節到肩關節)有幾個自由度?才發現,原來7個自由度是對人手臂的真實還原。 人的手臂(腕關節到肩關節)有幾個自由度?我想絕大部分人都沒有想過,更別說去了解有哪幾個自由度,即使是學工科的人,也未必能解釋清楚。沒想到知乎上居然有人把這個問題回答的這么專業有內涵,同時又那么有哲理,忍不住想要把這個答案分享一下。
2951
非標機械論壇 ??? 4年前
Altair Inspire Motion簡易多體動力學課程 

Inspire Motion–簡易多體動力學仿真工具?Altair Inspire Motion,創新性的簡易多體動力學軟件,無需設置部件之間的連接關系,通過剛體組命令即可完成設置,通過軟件自動檢測即可完成運動連接關系的設置。方便快捷得得到運動仿真軌跡,和結果分析數據。什么是Inspire Motion?
339 2
蝰蛇設計 ??? 5年前
20條/頁 
跳至頁

技術鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP
