



基于RecurDyn傳動系工具包對汽車動力總成進行NVH分析 

基于RecurDyn傳動系工具包對汽車動力總成進行NVH分析適用人群:齒輪傳動系統(tǒng)相關等研究人員,汽車領域相關工程師,對NVH感興趣的人員基于RecurDyn傳動系工具包對汽車動力總成進行NVH分析(免費)【已結(jié)束】 直播時間:2023-07-13 19:30直播大綱:NVH是噪音(Noise)、振動(Vibration)和聲振粗糙度(Harshness)三個英文單詞的首字母縮寫
1841
杭州擬創(chuàng)(RecurDyn原廠) ??? 2年前
RecurDyn 新手入門指導
,例如帶、鏈、履帶等工具包; SPI為固/液粒子仿真接口,例如與EDEM和ParticleWorks的聯(lián)合仿真; eTemplate也是一種自動建模方法,不同于ProcessNet,eTemplate通過定義模板表格,可供不會編程的用戶實現(xiàn)自動化建模。
4249 1
杭州擬創(chuàng)(RecurDyn原廠) ??? 2年前
RecurDyn成功案例:自行車鏈傳動系統(tǒng)的自動化建模與仿真 
)? 內(nèi)置自定義程序,可自動執(zhí)行重復操作,例如創(chuàng)建和修改多個對象? 可以精確模擬鏈條特性的襯套力? 用于快速仿真的并行處理技術(shù)(SMP)▎工具包? RecurDyn/Professional? RecurDyn/ProcessNet▎工程問題? 針對零件形狀的改變,很難創(chuàng)建物理樣機以分析其效果
2583 1
杭州擬創(chuàng)(RecurDyn原廠) ??? 2年前
跟我一起來認識RecurDyn 附RecurDyn柔性體技術(shù)介紹下載 
RecurDyn部分行業(yè)專用工具包二次開發(fā)模塊為用戶提供了ProcessNet及eTemplate 2種不同的的開發(fā)平臺,方便我們進行定制化的開發(fā)。下載地址:RecurDyn柔性體技術(shù)介紹
3507 1
huanggu4797 ??? 3年前
基于RecurDyn的節(jié)能與新能源汽車傳動系統(tǒng)動力學仿真技術(shù) 
課程內(nèi)容:1、兩擋純電動車變速箱動力學仿真及NVH特性分析2、汽車發(fā)動機正時帶傳動系統(tǒng)動力學建模與仿真分析3、基于RecurDyn和AMESim聯(lián)合仿真的鏈式CVT動力學性能分析4、基于RecurDyn與Particleworks聯(lián)合仿真的鏈傳動系統(tǒng)潤滑分析5、鋼帶CVT數(shù)字化設計與動力學仿真工具二次開發(fā)及案例演示
2674 1
杭州擬創(chuàng)(RecurDyn原廠) ??? 3年前
2023年6月培訓報名 
Track_LM/HM適用場景; 低速履帶的結(jié)構(gòu)組成與工作原理; Track_LM工具包建模:驅(qū)動輪建模、支重輪建模、導向輪建模、托輪建模、履帶鏈節(jié)建模、履帶裝配; 履帶系統(tǒng)約束、驅(qū)動及接觸的定義; 路面模型的創(chuàng)建流程:固定路面、移動路面; TrackAssembly參數(shù)設置:Bushing
2258
杭州擬創(chuàng)(RecurDyn原廠) ??? 3年前
RecurDyn成功案例:提高鈑金加工產(chǎn)能和精度的虛擬樣機技術(shù) 
⑦ 后處理結(jié)果輸出并分析重要數(shù)據(jù) ▎關鍵仿真技術(shù)? MFBD技術(shù)可有效地考慮系統(tǒng)的彈性,精確計算出各部件的位置? 強大求解器即使基于一般性能計算機也可以輕松實現(xiàn)仿真目標 ▎工具包? RecurDyn/Professional? RecurDyn/RFlex(模態(tài)柔體)
2341 3
杭州擬創(chuàng)(RecurDyn原廠) ??? 2年前
2023年培訓計劃 
——Track_LM/HM 輪胎建模——Tire 帶傳動建模工具包——Belt 鏈傳動建模工具包——Chain
1897
杭州擬創(chuàng)(RecurDyn原廠) ??? 3年前
運動無處不在,RecurDyn與您永相伴 | RecurDyn V2023發(fā)布暨數(shù)字孿生的元模型技術(shù) 
RecurDyn產(chǎn)品及應用簡介 安世亞太高級結(jié)構(gòu)工程師李桂花首先以“RecurDyn的仿真世界”視頻為引入,介紹了RecurDyn的發(fā)展歷程與其仿真平臺組成。其次,介紹了RecurDyn軟件的功能,可概括為高效的遞歸算法、強大的接觸建模分析能力、領先的MFBD技術(shù)、靈活的“機-電-控”一體化仿真模式、“壟斷型”“實用型”行業(yè)工具包五個特色功能。
2314
上海安世亞太 ??? 2年前
【8月19-21日 杭州】杭州擬創(chuàng)科技RecurDyn軟件培訓班 
RecurDyn軟件中搭載了履帶專用的工具,包能幫助用戶快速進行履帶建模與仿真分析。為了提供更多人學習使用RecurDyn履帶工具包的機會,特舉辦本次履帶專題培訓。
2697 1
技術(shù)鄰公告 ??? 3年前
RecrDyn履帶專用Track工具包 
多體動力學軟件RecurDyn自帶了履帶專屬的Track工具包,能快速幫助工程師進行履帶的建模與仿真工作。課程大綱:本次課程將帶領大家了解RecurDyn中的Track工具包,并通過案例演示講解使用ReccurDyn履帶工具包建模的過程。
4784 1 1
杭州擬創(chuàng)(RecurDyn原廠) ??? 3年前
RecurDyn成功案例:多履帶式城市偵察機器人虛擬驗證 
開發(fā)該形式的偵察機器人的一個研究小組利用RecurDyn的履帶工具包,輕松地對包含復雜履系統(tǒng)的機器人進行建模,并利用它有效地驗證了爬樓梯性能。
4326
杭州擬創(chuàng)(RecurDyn原廠) ??? 2年前
齒輪箱全方位仿真:RecurDyn 與 Particleworks 的聯(lián)合應用 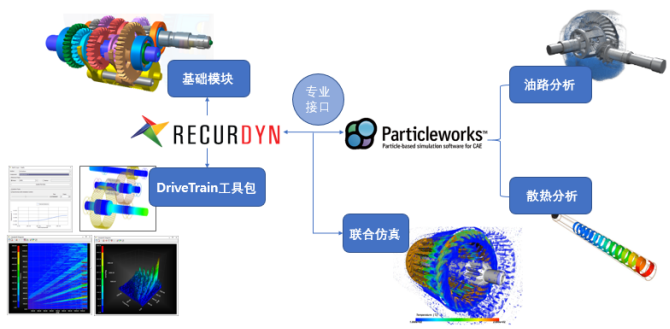
本文將介紹使用RecurDyn對齒輪箱進行仿真時的整體技術(shù)路線:首先設計好齒輪箱的整體結(jié)構(gòu),在RecurDyn中搭建多體動力學模型,定義各部分的運動行為及不同構(gòu)建之間的接觸關系。使用RecurDyn的Drivetrain工具包對模型進行修改,將齒輪箱中的齒輪、軸、軸承等部件使用Drivetrain工具包中的模塊進行替換,輸出軸變形、齒輪傳動誤差分析、NVH分析等仿真結(jié)果。
3515 3
杭州擬創(chuàng)(RecurDyn原廠) ??? 1年前
RecurDyn軟件培訓 (2022年度) 
傳動系工具包——Driver Train RecurDyn熱傳遞分析模塊
2295
杭州擬創(chuàng)(RecurDyn原廠) ??? 4年前
Recurdyn履帶問題 
angle,可以防止前后履帶板之間旋轉(zhuǎn)角度過大而碰撞用于搜索與鏈輪接觸的鏈節(jié)的工具。
4236 3
CAE仿真學習菌 ??? 2年前
RecurDyn成功案例:貨車運輸中的路面不平度與貨物的累積疲勞的關系 
在上述建立的環(huán)境中,進行貨車行駛仿真分析⑤ 計算車內(nèi)包裝好貨物的累積疲勞⑥ 對數(shù)據(jù)進行統(tǒng)計分析▎關鍵仿真技術(shù)建立貨車行駛仿真所需的貨車3D模型建立仿真所需的輪胎3D模型建立貨車行駛仿真所需的路面3D模型基于隨機振動理論,在GRoad中建立3D路面的縱斷面道路profile的峰度與貨物加速度累積疲勞的統(tǒng)計學分析▎工具包
4009
仿真客 ??? 3年前
RecurDyn成功案例:在初期研發(fā)階段對不同斷路器產(chǎn)品概念進行測試 
? 強大的軟件功能適用于多種領域及工況? 友好的用戶界面和快速求解器,有助于斷路器仿真? 支持使用柔性體進行系統(tǒng)分析的多柔體動力學技術(shù)(Multi Flexible Body Dynamics)▎工具包? RecurDyn/Professional? RecurDyn/FFlex▎工程問題?
2275
杭州擬創(chuàng)(RecurDyn原廠) ??? 2年前
RecurDyn成功案例:基于仿真設計的多關節(jié)機器人 
借助逆向動力學技術(shù)(Inverse Kinematics),來預測機器人的運動路徑?利用ParametricModeling參數(shù)化建模功能,可以輕松地調(diào)整控制器的PID增益值?不僅可以考慮正態(tài)模態(tài),還可以考慮軸承連接位置處節(jié)點的約束模態(tài)(Reduced Flex)?借助Scenario Analysis技術(shù),可以根據(jù)機器人的運動輕松計算多種姿勢的固有振動模態(tài) ▎工具包
2608 1 1
杭州擬創(chuàng)(RecurDyn原廠) ??? 3年前
RecurDyn成功案例:基于仿真設計的多關節(jié)機器人 
借助逆向動力學技術(shù)(Inverse Kinematics),來預測機器人的運動路徑?利用ParametricModeling參數(shù)化建模功能,可以輕松地調(diào)整控制器的PID增益值?不僅可以考慮正態(tài)模態(tài),還可以考慮軸承連接位置處節(jié)點的約束模態(tài)(Reduced Flex)?借助Scenario Analysis技術(shù),可以根據(jù)機器人的運動輕松計算多種姿勢的固有振動模態(tài) ▎工具包
2529
杭州擬創(chuàng)(RecurDyn原廠) ??? 2年前
RecurDyn V2023新版發(fā)布 ——軟件全方位優(yōu)化升級 
◆Linked Assembly工具包可使用各類幾何圖形(常規(guī)或?qū)氲腃AD幾何圖形)進行裝配,而不是使用RecurDyn提供的特定形狀的Clone body和幾何圖形(如RecurDyn/Belt、RecurDyn/Chain和RecurDyin/Track)進行裝配。
1599
杭州擬創(chuàng)(RecurDyn原廠) ??? 3年前
20條/頁 
 10
10 跳至頁

技術(shù)鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP
