



Python爬蟲-面向知乎的答案提取和圖片下載 
print("圖片下載成功") if __name__ == '__main__': main() 5.最后進(jìn)行包括知乎圖片的保存。
2186 3 2
320科技工作室 ??? 3年前
META讀取OptiStruct拓?fù)鋬?yōu)化結(jié)果 
我們在上一篇ANSA聯(lián)合OptiStruct進(jìn)行拓?fù)鋬?yōu)化中已經(jīng)進(jìn)行好拓?fù)鋬?yōu)化的設(shè)置和計算了。那今天我們就來交流一下,怎么在后處理META里查看結(jié)果。在Geometry中我們選擇我們的fem文件。在Result中我們選擇我們的h3d文件,點(diǎn)擊Run選擇我們最后一次循環(huán)計算的結(jié)果。
4822 7 2
張偉一 ??? 2年前
基于MeshWorks的B柱TWB/TRB結(jié)構(gòu)優(yōu)化方法 
本例中meta是通過批處理進(jìn)行調(diào)用讀取結(jié)果響應(yīng)的,其中一種方式是可以通過對生成的結(jié)果文件進(jìn)行識別讀取設(shè)計響應(yīng),但這種方法操作稍顯復(fù)雜。我們這里直接通過使用LSOPT的用戶定義后處理器來自動識別結(jié)果。這個User-Defined Postprocessor要求要讀取的結(jié)果文件滿足一定的格式,meta模塊也是滿足這個格式要求的。
2694
DEP MeshWorks ??? 3年前
SimData:基于aiSim的高保真虛擬數(shù)據(jù)集生成方案 
(2)samples文件夾 存放各類傳感器的關(guān)鍵幀數(shù)據(jù),包括: 6 路攝像頭圖像(.jpg文件) 5 路雷達(dá)點(diǎn)云(.pcd文件) 1 路激光雷達(dá)點(diǎn)云(.bin文件)其中,每隔0.5 秒抽取一幀數(shù)據(jù)作為關(guān)鍵幀進(jìn)行保存。(3)sweeps文件夾 保存除關(guān)鍵幀以外的連續(xù)傳感器數(shù)據(jù),用于構(gòu)建時序信息和多幀融合任務(wù)。
2375
康謀keymotek ??? 6月前
案例27-帶有3D網(wǎng)格重劃分的結(jié)構(gòu)鋼熱軋分析 
重啟動文件在每個子步中保存,因為重劃分需要重啟動文件,而需要重劃分的子步仍然未知。結(jié)果項也存儲在每個子步中。 出于說明的目的,重啟動文件和結(jié)果項在每個子步都會保存,盡管這樣做需要大量內(nèi)存。在大多數(shù)情況下,只需每隔幾個子步保存一次即可。
2705 7 2
龍飛宇 ??? 3年前
自動駕駛汽車中的激光雷達(dá)和攝像頭傳感器融合 
輸出:相機(jī)幀/齊次坐標(biāo) 最后,將點(diǎn)轉(zhuǎn)換回歐幾里得坐標(biāo)。輸出:相機(jī)幀/歐幾里得坐標(biāo) 如果不熟悉投影、旋轉(zhuǎn)和齊次坐標(biāo),可以學(xué)習(xí)立體視覺課程。 這是第1步的結(jié)果。 2.2D對象檢測 下一部分是用相機(jī)檢測物體。
2426
駕駛哥 ??? 4年前
詳解PLC自由通訊口設(shè)置步驟~ 
(2)接收數(shù)據(jù)幀格式選擇可以選擇起始字符和結(jié)束符的方式;可以通過判斷數(shù)據(jù)幀長度的方式;可以通過幀收到超時(例如設(shè)置超時時間為5MS,則在收到最后一個字符后如果5MS內(nèi)沒有收到其他字符,則判斷本幀結(jié)束)的方式判斷幀的結(jié)束(實例中通過接收10個字節(jié)為一幀)附:ASCII管理器的配置參數(shù)介紹(3)發(fā)送寄存器定義為字節(jié)的格式程序及相關(guān)數(shù)據(jù),使用SEND_RECV_MSG
2104
跟我學(xué)PLC ??? 3年前
詳解PLC自由通訊口設(shè)置步驟 
(2)接收數(shù)據(jù)幀格式選擇可以選擇起始字符和結(jié)束符的方式;可以通過判斷數(shù)據(jù)幀長度的方式;可以通過幀收到超時(例如設(shè)置超時時間為5MS,則在收到最后一個字符后如果5MS內(nèi)沒有收到其他字符,則判斷本幀結(jié)束)的方式判斷幀的結(jié)束(實例中通過接收10個字節(jié)為一幀)附:ASCII管理器的配置參數(shù)介紹(3)發(fā)送寄存器定義為字節(jié)的格式程序及相關(guān)數(shù)據(jù),使用SEND_RECV_MSG
2328 1 1
工控PLC學(xué)習(xí) ??? 3年前
Gromacs分析處理-模擬前后蛋白結(jié)構(gòu)差異對比圖的制作 
-b 100000 -e 100000 -pbc mol#這里的結(jié)構(gòu)一共100000幀,所以取最后一幀兩者都選擇protein進(jìn)行輸出,這樣我們就得到了first和last這兩個起始結(jié)構(gòu)的pdb結(jié)構(gòu)Step2:利用pymol預(yù)處理load first0.pdb #加載load last0.pdb align last0, first0 #對齊在命令框輸入
3849 2 2
320科技工作室 ??? 3年前
Fluent仿真后處理實戰(zhàn)技巧(二) 
打開 CFD-Post 模塊時,默認(rèn)出現(xiàn)的是瞬態(tài)計算最后一次保存的 .dat 文件的數(shù)據(jù)。
5873 2 1
星空caer ??? 2年前
星辰技文|Abaqus中提取裂縫數(shù)據(jù)并用matplotlib庫繪圖 
裂縫時,僅輸出節(jié)點(diǎn)坐標(biāo)信息;當(dāng)提取的是Cohesive單元裂縫時可輸出MMIXDMI(場量有定義MMIXDMI輸出)和裂縫寬度,裂縫寬度排序采用倒序記錄:第一個裂縫寬度,為最后一個分析步的最后一幀所對應(yīng)的寬度,第二個裂縫寬度,為倒數(shù)第二幀對應(yīng)的寬度,依此類推……讀取infos.csv文件代碼示例如下:def readCohesiveInfo(fileName): ### 讀取
4834 20 5
星辰_北極星 ??? 2年前
LIN總線入門. 
得到最后的結(jié)果后,取其反碼,我們就得到了最后的校驗和。參照下圖理解一下。 如何算出LIN的校驗和場 講解一下上面的圖,0x4A+0x55 = 0x9F這個沒有疑問,再加0x93 = 0x132,很明顯,超過了0xFF,分解為0x1和0x32,突出的高8位刪除,加到低8位中,0x1+0x32=0x33。
3317
駕駛哥 ??? 4年前
深度學(xué)習(xí)|基于MobileNet的多目標(biāo)跟蹤深度學(xué)習(xí)算法 
為進(jìn)一步表現(xiàn)本文算法的優(yōu)越性, 以ID標(biāo)號為3的目標(biāo)為例, 給出如圖 4所示的部分跟蹤結(jié)果, 且跟蹤框上帶有數(shù)字ID標(biāo)識. 由圖 4可見, 該算法在第200幀、260幀、320幀均能連續(xù)跟蹤, 跟蹤效果良好.
2441 1
龍騰AI技術(shù) ??? 3年前
在MS中基于perl腳本實現(xiàn)氫鍵統(tǒng)計 
但是,對于動力學(xué)的大體系,或者是幾百上千的軌跡過程的氫鍵樹目判斷,確實不太可行的,因此,我們構(gòu)建了以perl為基礎(chǔ)的腳本文件實現(xiàn)對氫鍵的分析,具體分析結(jié)果如下所示。這是對最后一幀的數(shù)據(jù)統(tǒng)計,通過對最后一幀的統(tǒng)計,也可以是就算過程中的任意幀的統(tǒng)計,我們可以清洗的或者體系中氫鍵的數(shù)量和長度。
2841
320科技工作室 ??? 2年前
一文帶你了解機(jī)器人是如何通過視覺實現(xiàn)目標(biāo)跟蹤的! 
最后在這些評分中找一個得分最高的候選框作為預(yù)測的目標(biāo)(Prediction A),或者對多個預(yù)測值進(jìn)行融合(Ensemble)得到更優(yōu)的預(yù)測目標(biāo)。至此算法完成了根據(jù)第一幀的信息對第二幀的預(yù)測,后續(xù)幀以此類推,同時根據(jù)指定規(guī)則更新模型(Model Updater)。
2307 1
駕駛哥 ??? 4年前
Python二次開發(fā)—創(chuàng)建輸出數(shù)據(jù)庫并添加數(shù)據(jù) 
廢話不多說,進(jìn)入今天的正題: 本期內(nèi)容將編寫腳本創(chuàng)建輸出數(shù)據(jù)庫,并向其中添加模型數(shù)據(jù)、場數(shù)據(jù)和歷史數(shù)據(jù),在后處理模塊中顯示位移場變量計算結(jié)果,最后保存ODB文件。源腳本來自于曹老師的《Python語言在Abaqus中的應(yīng)用》,好書值得推薦! 編程思路: 導(dǎo)入相應(yīng)模塊。
3489 4 3
易公子 ??? 4年前
齒輪箱全方位仿真:RecurDyn 與 Particleworks 的聯(lián)合應(yīng)用 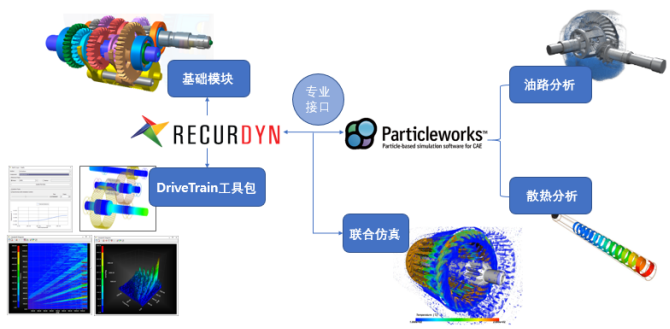
使用RecurDyn的Drivetrain工具包對模型進(jìn)行修改,將齒輪箱中的齒輪、軸、軸承等部件使用Drivetrain工具包中的模塊進(jìn)行替換,輸出軸變形、齒輪傳動誤差分析、NVH分析等仿真結(jié)果。最后結(jié)合流體分析軟件Particleworks進(jìn)行聯(lián)合仿真,引入流固耦合計算。分析齒輪箱在運(yùn)行過程中,內(nèi)部油路的運(yùn)行情況,根據(jù)油路的分布對潤滑性能進(jìn)行評判。
3515 3
杭州擬創(chuàng)(RecurDyn原廠) ??? 1年前
案例56-螺紋連接分析 
步驟3:求解帶有彎曲載荷的三維模型 在施加彎曲載荷的情況下,繼續(xù)對三維模型進(jìn)行分析(通過多幀重啟東): 3.1 重啟動分析 ANTYPE,,RESTART,5,5 分析在MAP2DTO3D,SOLVE之后的最后一個收斂子步驟執(zhí)行多幀重新啟動。
3491 6 4
龍飛宇 ??? 3年前
RecurDyn 2023 新功能介紹 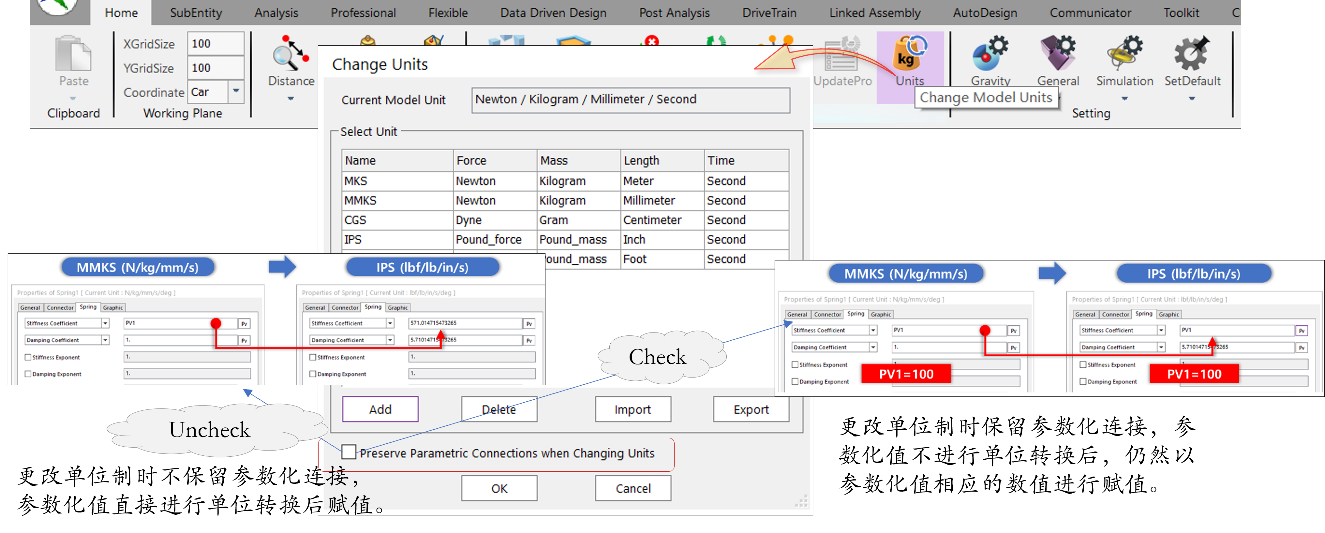
柔性體組件元模型功能-提升仿真速度定義目標(biāo)Fflex的接口點(diǎn)(Meta-Model與系統(tǒng)的力傳遞接口),選擇每一接口點(diǎn)的自由度及其位移區(qū)間。RecurDyn將所有自由度組合成DOE,執(zhí)行DOE仿真生成CMM(Component Meta-Model),用Meta Model替換Fflex body,大大提升計算速度。
5247 1 1
CAE仿真學(xué)習(xí)菌 ??? 2年前
力學(xué)仿真 | 塑性材料卡片仿真準(zhǔn)確性提升方法分享 
3 剪切試驗剪切試驗是評估材料在受到剪切力作用時的抗剪性能和變形特性的一種方法。通過在不同剪切速率下的剪切試驗,可以獲取材料的剪切模量、剪切強(qiáng)度等關(guān)鍵參數(shù)。剪切條件:試驗速度2mm/min,應(yīng)力數(shù)據(jù)采集頻率每秒1個~4個,結(jié)合DIC技術(shù)進(jìn)行應(yīng)變檢測,拍攝幀數(shù)最小60fps,視頻儲存是選擇跳幀保存,以確保應(yīng)力數(shù)據(jù)與應(yīng)變數(shù)據(jù)間隔一致。
2702 1
國高材高分子材料產(chǎn)業(yè)創(chuàng)新中心 ??? 2年前
20條/頁 
 16
16 跳至頁

技術(shù)鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓(xùn)客服
- 平臺客服
TOP
