




如何快速建立大型多體動(dòng)力學(xué)模型 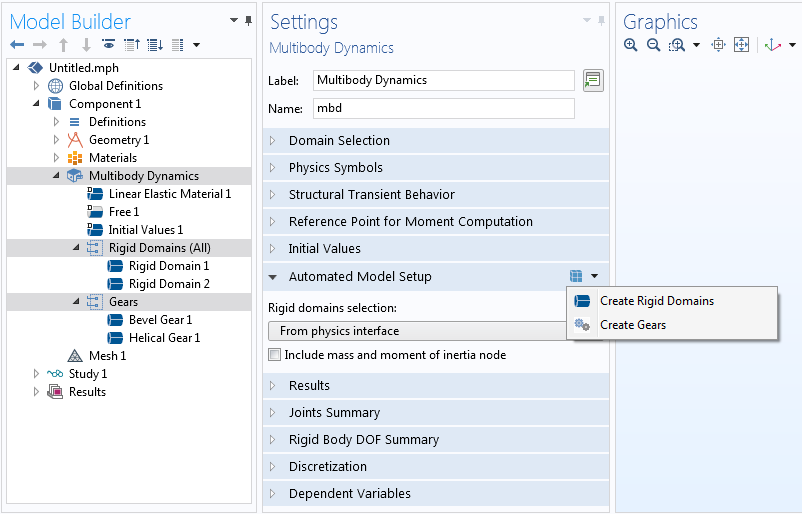
在 COMSOL Multiphysics? 中自動(dòng)設(shè)置多體模型 自 COMSOL Multiphysics 5.5 版本開始,軟件引入了一項(xiàng)新功能,用于快速設(shè)置大型多體系統(tǒng)模型。使用軟件多體動(dòng)力學(xué)接口中提供的自動(dòng)模型設(shè)置功能,您可以輕松地從模型幾何結(jié)構(gòu)一次性創(chuàng)建多個(gè)剛性域和齒輪物理節(jié)點(diǎn)。
3242 1
CAE仿真學(xué)習(xí)菌 ??? 2年前
如何在多體動(dòng)力學(xué)模型中評估齒輪嚙合剛度 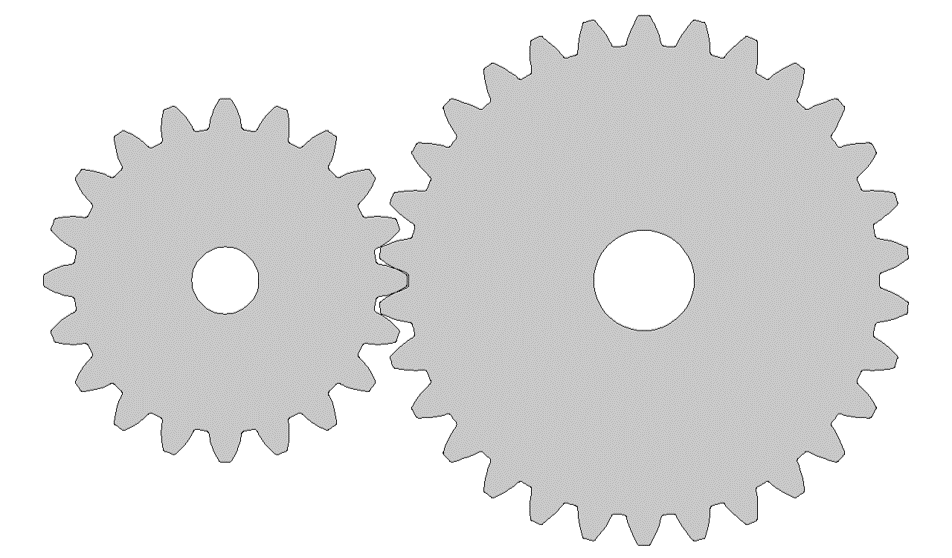
結(jié)語 齒輪嚙合剛度的變化取決于多個(gè)幾何和材料參數(shù),在傳動(dòng)系統(tǒng)的 NVH 分析中起著重要作用。借助 COMSOL Multiphysics 和其附加的多體動(dòng)力學(xué)模塊,我們可以通過結(jié)合接觸分析與零件庫中的參數(shù)化齒輪來計(jì)算齒輪嚙合剛度的變化。然后,在多體動(dòng)力學(xué)模型中使用計(jì)算出的齒輪嚙合剛度來準(zhǔn)確地捕獲與傳動(dòng)系統(tǒng)其他部分一起工作的齒輪的動(dòng)力學(xué)。
2967 1 1
CAE仿真學(xué)習(xí)菌 ??? 2年前
2023多體動(dòng)力學(xué)分析軟件合集 
03COMSOL Multiphysics COMSOL Multiphysics 軟件的多體動(dòng)力學(xué)模塊是一款附加產(chǎn)品,其中提供一套先進(jìn)的工具,支持使用有限元分析(FEA)來設(shè)計(jì)和優(yōu)化二維和三維多體系統(tǒng),能夠在節(jié)約計(jì)算工作量的同時(shí),模擬柔體和剛體混合系統(tǒng),找到系統(tǒng)中的關(guān)鍵部件,從而方便您能夠在汽車工程、航空航天工程、生物力學(xué)等主要應(yīng)用領(lǐng)域執(zhí)行更加詳細(xì)的部件級結(jié)構(gòu)分析
7581 5
CAE仿真學(xué)習(xí)菌 ??? 2年前
多體動(dòng)力學(xué)仿真利器—UltraLAB最快圖形工作站硬件配置推薦 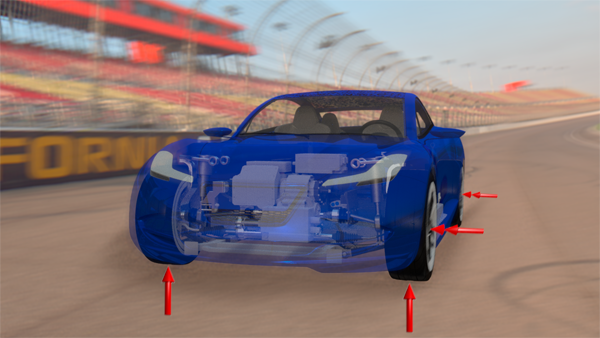
§ COMSOL Multiphysics:用于多物理場仿真,包括多體動(dòng)力學(xué)仿真、流體仿真、熱仿真等。 多體動(dòng)力學(xué)仿真中常用的算法或求解器包括:§ 拉格朗日方法:將系統(tǒng)中的各個(gè)體表示為質(zhì)點(diǎn)或剛體,然后根據(jù)牛頓運(yùn)動(dòng)定律求解系統(tǒng)的運(yùn)動(dòng)方程。§ 歐拉方法:將系統(tǒng)中的各個(gè)體表示為質(zhì)點(diǎn)或剛體,然后根據(jù)歐拉運(yùn)動(dòng)方程求解系統(tǒng)的運(yùn)動(dòng)方程。
2532
UltraLAB ??? 2年前
多學(xué)科統(tǒng)一的多體動(dòng)力學(xué)建模方法 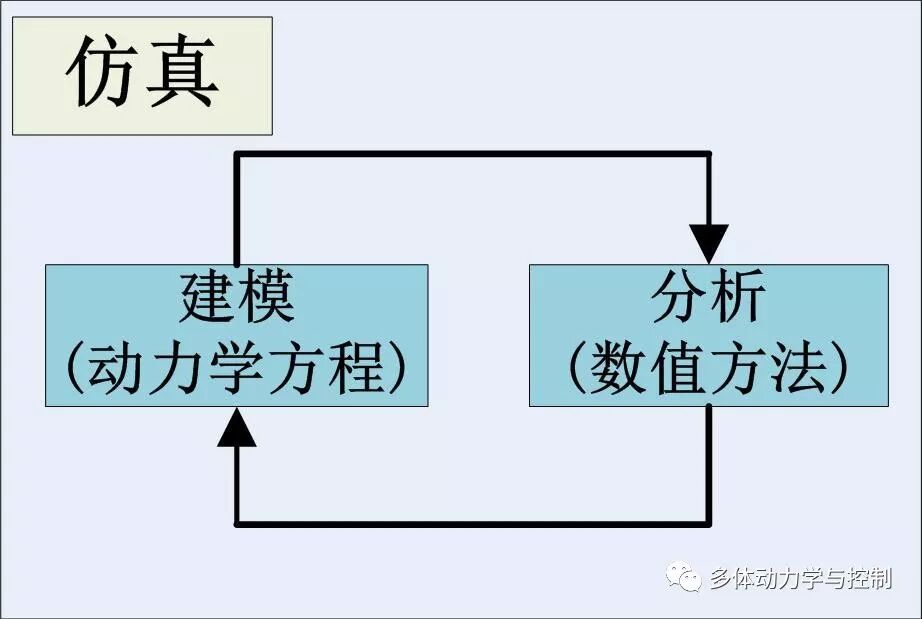
在多學(xué)科多體系統(tǒng)動(dòng)力學(xué)的分析中,應(yīng)該包括建模和分析,即建立的動(dòng)力學(xué)方程和利用數(shù)值方法進(jìn)行求解,最后形成了仿真分析,如下圖所示 在多學(xué)科耦合系統(tǒng)動(dòng)力學(xué)建模和分析的方法也很多,包括線狀圖法(Linear graph)、鍵合圖法(Bond graph)、圖論(Graph theories)、“等效”方法。
3299 5 3
CAE仿真學(xué)習(xí)菌 ??? 2年前
RecurDyn 應(yīng)用:基于多體動(dòng)力學(xué)的齒輪傳動(dòng)系統(tǒng)動(dòng)力學(xué)仿真 
作為齒輪傳動(dòng)系統(tǒng)動(dòng)態(tài)特性的預(yù)測方法,本文中介紹了考慮齒輪接觸剛度變化的多體動(dòng)力學(xué)方法,并給出了驗(yàn)證結(jié)果,結(jié)論如下:-采用多體動(dòng)力學(xué)方法進(jìn)行齒輪接觸計(jì)算,可以考慮齒輪變形和嚙合齒數(shù)變化引起的嚙合剛度變化。-該方法可以對系統(tǒng)的行為進(jìn)行仿真和評估。振動(dòng)由齒輪接觸引發(fā),并通過軸和軸承傳遞到外殼。 -多體動(dòng)力學(xué)方法可以在考慮瞬態(tài)條件下計(jì)算齒輪傳動(dòng)系統(tǒng)的動(dòng)態(tài)特性。
3872 2
CAE仿真學(xué)習(xí)菌 ??? 2年前
挖掘機(jī)多體動(dòng)力學(xué)仿真 
軟件可對由剛體和柔體組成的多體系統(tǒng)進(jìn)行運(yùn)動(dòng)學(xué)、動(dòng)力學(xué)、靜力學(xué)及特征值分析,求解器采用向后差分格式對多體動(dòng)力學(xué)模型生成的微分代數(shù)方程組進(jìn)行動(dòng)力學(xué)積分,完成上萬甚至百萬廣義坐標(biāo)的求解。軟件支持幾何精確法/浮動(dòng)坐標(biāo)法/任意拉格朗日歐拉方法描述的單元及網(wǎng)格類型,具備豐富的約束和連接庫,支持基于子系統(tǒng)的復(fù)雜模型創(chuàng)建。
3709 3
CAE仿真學(xué)習(xí)菌 ??? 2年前
機(jī)械工程中多體動(dòng)力學(xué)的運(yùn)用進(jìn)展 
多體動(dòng)力學(xué)的概念及研究價(jià)值 多體動(dòng)力學(xué)的研究是建立在多個(gè)物體動(dòng)力學(xué)上,所以又稱之為多體系統(tǒng)動(dòng)力學(xué),多個(gè)物體通過特定的鉸鏈連接起來,形成一種復(fù)雜的系統(tǒng)。這些物體根據(jù)性質(zhì)不同, 可以分為多剛體系統(tǒng)和多柔性多體系統(tǒng)。
2330 2 1
CAE仿真學(xué)習(xí)菌 ??? 2年前
你知道多體動(dòng)力學(xué)里的違約修正嗎? 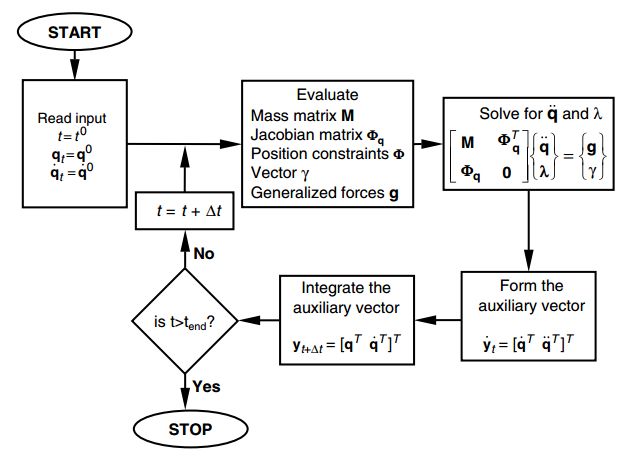
近年來, 多體系統(tǒng)動(dòng)力學(xué)的研究越來越受到重視。 一方面由于多體系統(tǒng)動(dòng)力學(xué)在機(jī)械、車輛、機(jī)器人、航空航天等工程領(lǐng)域占有重要的地位, 是先進(jìn)制造技術(shù)和虛擬現(xiàn)實(shí)的研究基礎(chǔ)。 另一方面其推動(dòng)多學(xué)科間的相互滲透, 促進(jìn)了學(xué)科融合。 經(jīng)過多年的發(fā)展, 多體系統(tǒng)動(dòng)力學(xué)的研究體系已經(jīng)形成。
2877 1 1
CAE仿真學(xué)習(xí)菌 ??? 2年前
某行走機(jī)構(gòu)多體動(dòng)力學(xué)與結(jié)構(gòu)強(qiáng)度聯(lián)合仿真分析 
3.1 多體動(dòng)力學(xué)機(jī)構(gòu)鉸點(diǎn)優(yōu)化 在已經(jīng)建立的多體動(dòng)力學(xué)模型中,在保證機(jī)構(gòu)各項(xiàng)設(shè)計(jì)約束的前提下,通過適當(dāng)調(diào)整機(jī)構(gòu)的鉸點(diǎn)相對位置,不斷降低絲杠兩鉸接點(diǎn)在實(shí)際支車作業(yè)過程中的最大載荷,優(yōu)化后通過MotionSolver多體動(dòng)力學(xué)分析,荷歷程曲線變化如下圖6所示。 圖6 優(yōu)化前后結(jié)構(gòu)對比 上述分析結(jié)果中紅色曲線為優(yōu)化后的鉸點(diǎn)載荷曲線,藍(lán)色曲線為原結(jié)構(gòu)鉸點(diǎn)載荷曲線。
3175
CAE仿真學(xué)習(xí)菌 ??? 2年前
一文了解多體動(dòng)力學(xué)仿真分析方法和應(yīng)用領(lǐng)域 
Ansys解決方案針對上述多體動(dòng)力學(xué)在各個(gè)行業(yè)內(nèi)的一些應(yīng)用,Ansys提供了完整的解決方案,包括:疲勞仿真、模態(tài)仿真、動(dòng)力學(xué)特性、線性有限元分析、多體動(dòng)力學(xué)分析等,并且具有強(qiáng)大的無網(wǎng)格仿真技術(shù),能夠高效并精確的求解多體運(yùn)動(dòng)與結(jié)構(gòu)變形的耦合問題,能夠?qū)ο到y(tǒng)的運(yùn)動(dòng)性能、結(jié)構(gòu)、振動(dòng)、疲勞等進(jìn)行分析。1、動(dòng)力傳動(dòng)系統(tǒng)的動(dòng)力學(xué)分析動(dòng)力傳動(dòng)系統(tǒng)結(jié)構(gòu)包括齒輪、軸承、轉(zhuǎn)軸、齒輪箱等。
3819
Ansys中國 ??? 4年前
基于多體動(dòng)力學(xué)的發(fā)動(dòng)機(jī)噪聲預(yù)測與輕量化 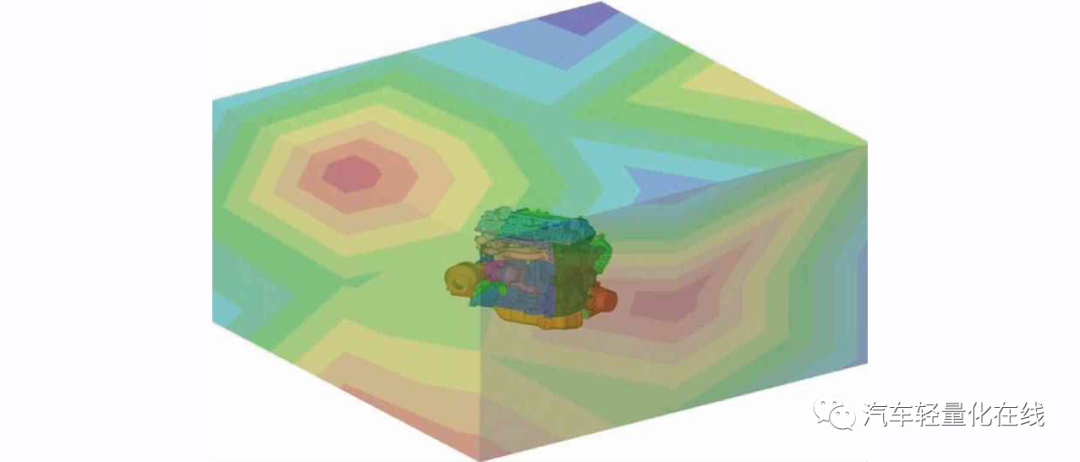
,驗(yàn)證了多體動(dòng)力學(xué)模型的真實(shí)性。
2607 1 1
聲學(xué)工程師小吳 ??? 2年前
Adams 多體動(dòng)力學(xué):工業(yè)仿真的黃金標(biāo)準(zhǔn)與未來引擎
求解精度與效率雙優(yōu)· 相比傳統(tǒng)有限元(FEA),Adams 以多體動(dòng)力學(xué)專用求解器實(shí)現(xiàn)非線性動(dòng)力學(xué)快速計(jì)算,耗時(shí)僅為 FEA 的 1/5-1/10,同時(shí)精準(zhǔn)輸出全運(yùn)動(dòng)周期的載荷、加速度、應(yīng)力數(shù)據(jù),為 FEA 提供精準(zhǔn)邊界條件,提升結(jié)構(gòu)分析精度dr.adams.com。
837
庭田科技 ??? 5天前
ANSYS workbench 挖掘機(jī)多體動(dòng)力學(xué)分析 
本案例適合哪些人學(xué)習(xí):1、學(xué)習(xí)型仿真工程師2、理工科院校學(xué)生3、對有限元分析感興趣的工程師你會(huì)得到什么:1、學(xué)習(xí)挖掘機(jī)的三維模型處理2、學(xué)習(xí)挖掘機(jī)接觸相關(guān)的接觸設(shè)置3、學(xué)習(xí)多體動(dòng)力學(xué)分析步的建立4、學(xué)習(xí)挖掘機(jī)多體動(dòng)力學(xué)分析的載荷施加案例介紹:所使用軟件為ANSYS workbench2020r2.
2639
天空紀(jì)年xh ??? 1年前
多體動(dòng)力學(xué)歷史的重要一頁 
盡管做了大量的研究工作,并且在航空領(lǐng)域有所應(yīng)用,但在70年代前還是沒有通用的多體動(dòng)力學(xué)軟件。通用型動(dòng)力學(xué)軟件的引入,重新塑造了如今的動(dòng)力學(xué)領(lǐng)域,這些發(fā)生在美國中西部。首先引入計(jì)算程序的研究并沒有發(fā)表在AIAA,而是發(fā)表在ASME Design Engineering Division,與AIAA在廣泛動(dòng)力學(xué)的研究領(lǐng)域不同。
2813 24 21
peaky ??? 3年前
ANSYS Workbench多體動(dòng)力學(xué)實(shí)例——萬向節(jié) 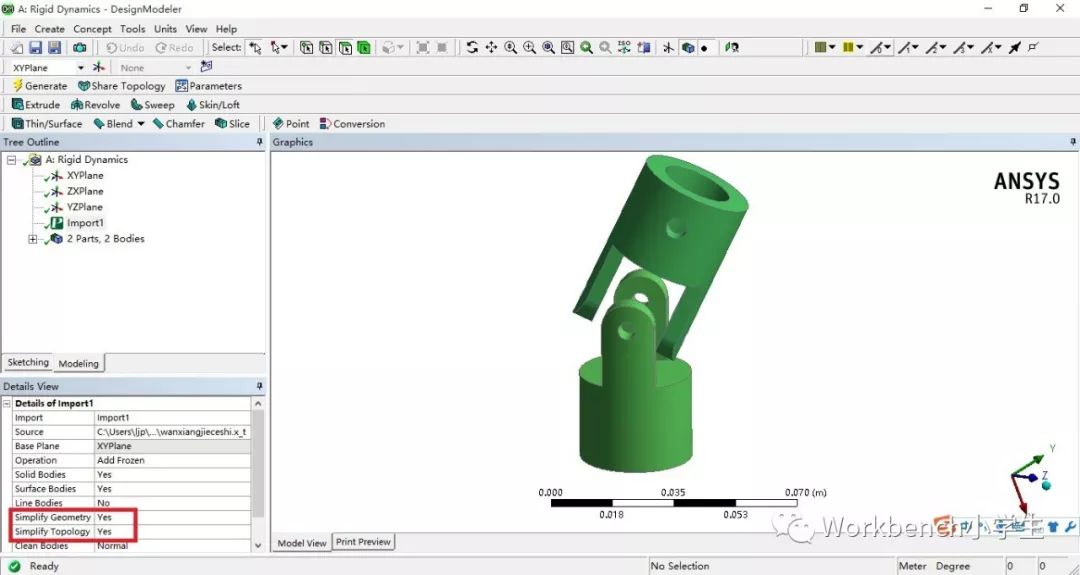
最近研究的是運(yùn)動(dòng)仿真,因此使用了多體動(dòng)力學(xué)來仿真,從總模型中拆下來一個(gè)萬向節(jié),對其施加運(yùn)動(dòng)副,本文主要研究的方向有:①萬向節(jié)的運(yùn)動(dòng)副如何建立②從多體動(dòng)力學(xué)中導(dǎo)出MotionLoad.txt文檔導(dǎo)入靜力學(xué)進(jìn)行力學(xué)仿真。
5166 3 1
CAE仿真學(xué)習(xí)菌 ??? 2年前
快訊 ▎擬創(chuàng)科技內(nèi)部培訓(xùn)-多體系統(tǒng)動(dòng)力學(xué)介紹 
吳博士對多體系統(tǒng)做了詳細(xì)地講解,由淺入深對學(xué)科知識進(jìn)行分解剖析,大家受益匪淺。培訓(xùn)結(jié)束后各位工程師均表示,通過本次內(nèi)訓(xùn)課程理清了整體知識的脈絡(luò),填補(bǔ)了在多體動(dòng)力學(xué)方面部分知識的空白,并且給今后的仿真和培訓(xùn)工作提供了更清晰的思路,并表示希望公司能多舉辦類似專家培訓(xùn)。
2214
杭州擬創(chuàng)(RecurDyn原廠) ??? 3年前
報(bào)名 | Ansys Motion 多體動(dòng)力學(xué)分析功能更新及熱門應(yīng)用分享 
5月10日,Ansys將推出主題網(wǎng)絡(luò)研討會(huì)『Ansys Motion 多體動(dòng)力學(xué)分析功能更新及熱門應(yīng)用分享』,本次會(huì)議將介紹Ansys Motion在熱門領(lǐng)域的最新應(yīng)用,歡迎手機(jī)、屏幕、汽車、重工等領(lǐng)域有多體動(dòng)力學(xué)仿真的研發(fā)工程師,多體相關(guān)專業(yè)的教師及學(xué)生等預(yù)約本場活動(dòng),了解更多詳情。
2546
Ansys中國 ??? 4年前
報(bào)名 | Ansys Motion 多體動(dòng)力學(xué)分析功能更新及熱門應(yīng)用分享 
5月10日,Ansys將推出主題網(wǎng)絡(luò)研討會(huì)『Ansys Motion 多體動(dòng)力學(xué)分析功能更新及熱門應(yīng)用分享』,本次會(huì)議將介紹Ansys Motion在熱門領(lǐng)域的最新應(yīng)用,歡迎手機(jī)、屏幕、汽車、重工等領(lǐng)域有多體動(dòng)力學(xué)仿真的研發(fā)工程師,多體相關(guān)專業(yè)的教師及學(xué)生等預(yù)約本場活動(dòng),了解更多詳情。
2232
CAE聯(lián)盟新聞 ??? 4年前
20條/頁 
 74
74 跳至頁

技術(shù)鄰APP
工程師必備
工程師必備
- 項(xiàng)目客服
- 培訓(xùn)客服
- 平臺客服
TOP
