



abaqus在使用邊界位移條件后如何解決位移自由度和轉動自由度突變問題?
abaqus在使用邊界位移條件后如何解決位移自由度和轉動自由度突變問題?
2297 1
愛汪不愛喵 ??? 3年前
ABAQUS中使用位移邊界條件后,如何保證轉動自由度無突變?
ABAQUS中使用位移邊界條件后,如何保證轉動自由度無突變?
2088 1
愛汪不愛喵 ??? 3年前
五自由度機械臂運動學分析(三轉動+兩移動自由度) 
1正運動學分析采用標準的D-h法進行機械腿模型分析:D-h表如下(2)通過(1)求解出機器人各位姿變換矩陣后,求解機器人手臂變換矩陣。通過matlab 計算,寫出機器人末端位置。正運動學分析根據D-H表規定得到如下變換矩陣為:由此可得機器人相鄰兩關節位姿分別為:所以,坐標系{4}相對于基坐標系的變換矩陣為
3035
余俊煒 ??? 3年前
ABAQUS模擬隧道開挖后施作襯砌,利用生死單元法添加的襯砌,我在step-1中襯砌未激活,但是仍然有構件自由度比較大的警告,請問這是為什么?
ABAQUS采用生死單元法模擬隧道開挖后的襯砌施作,建好襯砌模型以后,第一分析步未激活,但是在第一分析步中仍然有警告:Solver problem. Numerical singularity when processing node PART-SHOTCRETE-1.14 D.O.F. 1 ratio = 43.2937E+12 .請問這是為什么?
3105 3 1
用戶_1256 ??? 1年前
淺析有限元分析中自由度的概念 
為什么實體單元只有3個平動自由度而無轉動自由度(物理解釋)?考慮一張紙片(2-D幾何)或者一把長的鐵尺(1-D幾何)。他們容易被彎曲和扭轉(轉動自由度)。但是如果是除塵刷或者壓紙之類的實體。他們通常不會承受很大的彎曲或扭轉。因此,實體單元只有3個平動自由度而無轉動自由度。補充:空間中的質點有三個自由度。
2694
CAE知識手札 ??? 2年前
為什么最好的機械臂是7個自由度而不是6個? 
7個自由度 有人問5,6是不是一樣的。5是擰鑰匙時唯一要轉動的關節,動力來自小臂兩根橈骨的扭轉;6是把鼠標放在桌面用手轉時唯一要轉動的關節,動力來自手腕的旋轉。 至于為什么人手臂是7個自由度,而不是8個也不是6個,可能是因為上帝非常懂機器人控制,下面盡量簡單地介紹一下。
2949
非標機械論壇 ??? 4年前
ABAQUS一個關于uel二次開發inp文件中自由度含義?
代碼:*User element, nodes=8, type=U1, properties=12, coordinates=2, var=1001,21,31,11該實例中有4哥自由度,ux,uy,c(濃度常,用溫度場自由度表示),φ問題:這串代碼中激活自由度為什么寫成這個格式?每一行的具體含義?數字相應的具體自由度可以在哪里查得?
2739
g(x) ??? 1年前
算例精選STAR-CCM+模擬船航行|DFBI:頂頭波中的船 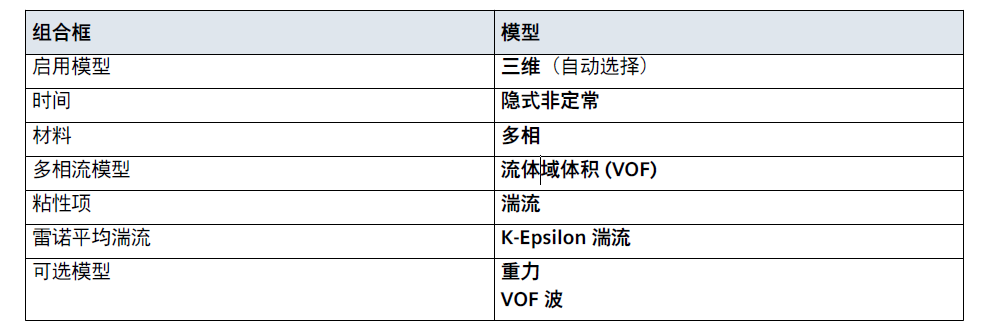
雖然創建6自由度體時已配有自由運動選項,但仍需要為體指定可以使用的移動方式。在本例中,該體必須可以沿 Z 軸方向平移(升降),沿 Y 軸方向轉動(俯仰)。10.選擇 DFBI > 6 自由度體 > 船 > 自由運動節點,然后勾選Z軸向運動和Y 軸向旋轉屬性。
6234 4
仿真客 ??? 3年前
喵星人嘔心瀝血總結ABAQUS易出錯的邊界條件 
</p><p>需要注意的是,參考點具有轉動自由度,為實現支座鉸接,必須釋放UR1自由度,同時約束UR2和UR3自由度。
3081 27 14
會CAE的喵星人 ??? 9月前
喵星人嘔心瀝血總結ABAQUS易出錯的邊界條件 

1.支架設置的常見問題——鉸接邊界條件設置了豎向約束認為支座是固定鉸接,因此釋放了轉動自由度UR1,事實上,對于實體單元而言并無轉動自由度,因此UR1,UR2,UR3的約束設置與否均無意義。另外,由于對整個底面設置了U2方向的位移自由度,因此該面不會發生轉動。這是因為轉動時該面需繞軸轉動,因此必定有面上的點發生U2方向位移,如果約束U2方向位移,相當于約束面的轉動自由度。
1152
會CAE的喵星人 ??? 6月前
STAR-CCM+ 案例:體積力螺旋槳法 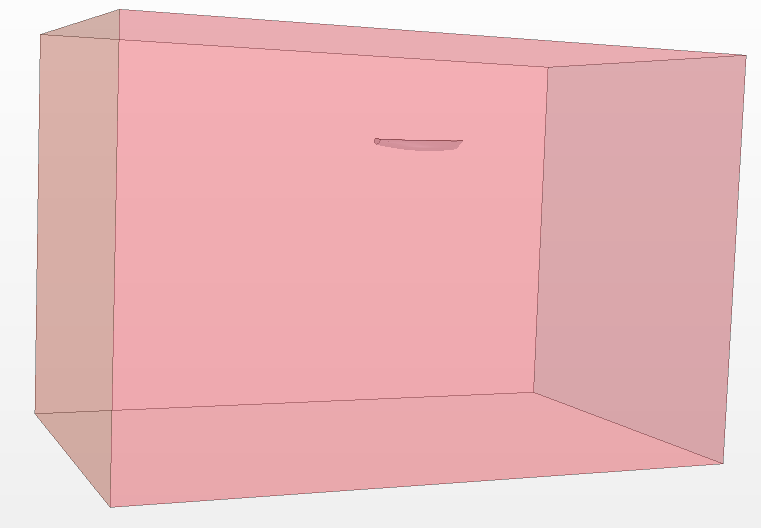
(4)應用船推力;為了將虛擬盤生成的推力應用于船,需要創建 6 自由度船體外力。
3511
aero-engine ??? 2年前
案例19 挖掘機臂裝配體的瞬態動力學分析 
活塞1和力臂1,活塞2和力臂2之間的轉動副 自由自由度——1個沿轉動軸的相對轉動 約束自由度——3個相對位移,2個相對轉動 很顯然由于平動連接副中的轉動約束,活塞1相對壓力缸1沒有轉動,因此活塞1和力臂1,活塞2和力臂2之間的轉動副中的轉動約束是不需要的,而這些部件之間的相對位移必須保留,所以轉動副可被球面副所代替,球面副提供相同的相對位移約束
3340 8 1
龍飛宇 ??? 3年前
CAE黑話:自由度(DOF)/多點約束(MPC)/剛體位移 
1?? 自由度 ( Degree of Freedom , DOF ) 節點能運動的獨立方向。3D結構中,一個節點通常有6個自由度:3個平動 (UX, UY, UZ) 和 3個轉動 (ROTX, ROTY, ROTZ)。約束 (Boundary Condition) 的本質就是限制某些節點的DOF。
1451
技術鄰-大奎 ??? 2月前
STAR-CCM+入水仿真/運動建模案例:落入水中的救生艇 
在DFBI> 6-DOF Bodies > Boat > Initial Values > Moment of Inertia節點,設置轉動慣量為[16000.0,16000.0, 16000.0] kg-m^2。雖然創建6 自由度體時已配有自由運動選項,但仍需要為體指定可以使用的移動方式。
3610 1
仿真客 ??? 3年前
ABAQUS橡膠磨損:幫助文檔輪胎磨損例子 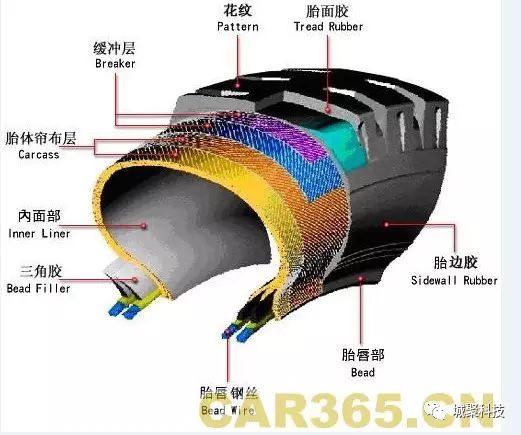
同樣,驅動狀態:輪胎的角速度足夠大以至于輪胎和路面之間的所有或者部分接觸點放生滑動,同時作用在輪胎上的總扭矩于輪胎自由狀態的轉動角速度方向一致。 對于同樣的地面速度V0,輪胎的在自由轉動、驅動和制動時的角速度是不同的。通常在自由轉動狀態下輪胎自由轉動的角速度和地面速度組合不能預先知道。
4549 6 1
想飛更高 ??? 2年前
STAR-CCM+ 虛擬盤模型案例:體積力螺旋槳盤
(4)應用船推力;為了將虛擬盤生成的推力應用于船,需要創建 6 自由度船體外力。
3579 2
仿真客 ??? 3年前
電動汽車電機總成懸置系統仿真分析及優化 
驅動電機在工作過程中,在懸置系統某一個自由度方向作用變化的激振力,并引起該方向的振動時,導致其他自由度方向的振動,出現耦合振動。由于耦合振動擴大了振動頻率的范圍,為了達到相同程度的隔離效果,懸置必須要更軟,從而使得穩定性降低。因此,需要對懸置系統進行解耦優化。
3317 14 10
仿真客 ??? 3年前
ABAQUS讀懂彈簧/非線性彈簧單元——“小而精”的Spring element 
可包含平動自由度與轉動自由度。</p><p><br></p><p>3.
2553 4
會CAE的喵星人 ??? 7月前
【技術貼】EXCITE Mount Layout工具在動力總成懸置設計上的應用 
在動力總成的懸置系統設計中,應盡可能解除動力總成的6自由度之間的剛性振動耦合,一方面便于減小可能激起共振響應的頻帶寬度,另一方面便于合理配置其固有振動頻率,使激勵頻率遠離固有頻率,獲得良好的整體隔振效果。因此,解除多自由度振動耦合便成為動力總成隔振系統設計中與固有頻率的合理配置同等重要的目標。通常對于懸置解耦率一般都要求。
2829 10 5
AVL先進模擬技術 ??? 3年前
有限元分析需要注意的三大原則 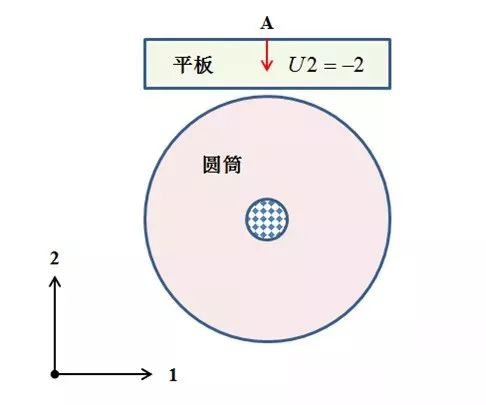
圖1 定義了位移邊界的模型圖2 后處理時看到平板發生了異常的位移對于三維模型,每個部件都有3個平動自由度和3個轉動自由度;對于二維模型,每個部件都有2個平動自由度和1個轉動自由度。在建立靜力分析模型時,必須在模型每個實體的所有平動和轉動自由度上定義足夠的邊界條件,以避免它們出現不確定的剛體位移,否則將導致分析往往無法收斂,即使能夠收斂,結果也往往是錯誤的。
2635 1
仿真客 ??? 3年前
20條/頁 
 15
15 跳至頁

技術鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP
