注冊
/
登錄


全部分類
文章
視頻
問答
最新發布最新評論
技術鄰公告
5493 8 30 28
什么是無人機葉片的顫振 葉片顫振屬于流體誘發振動現象,是葉片振動的一種形式。具體而言,彈性體的葉片在氣動力作用下形成的氣彈耦合的自激振動,稱為顫振。隨著無人機葉片性能的不斷提高,氣動極限負荷增大,葉片往往設計得薄而長,剛性下降,這導致葉片顫振發作的幾率增多。 無人機葉片顫振的影響 葉片顫振一旦發作,會產生大振幅的劇烈振動,這種振動對葉片的影響主要有以下幾個方面: 疲勞損壞:大振幅的振動會使葉片在短

UltraLAB
4240 2 4 2
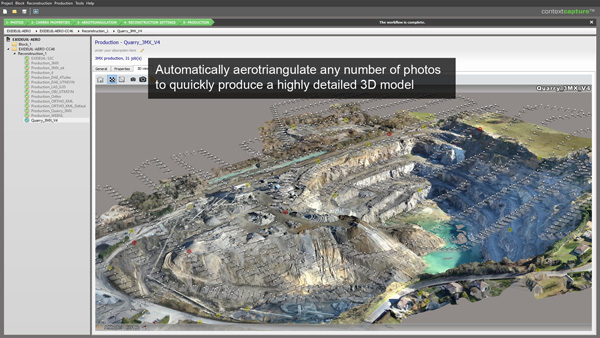
傾斜攝影建模應用越來越廣泛,例如 - 城市三維建模: 使用傾斜攝影技術可以獲取建筑物、道路等城市環境的高精度三維模型,為城市規劃、地理信息系統(GIS)等領域提供支持。 - 土地管理和規劃: 通過傾斜攝影,可以獲取大范圍土地的高分辨率影像,用于土地利用規劃、土地管理和監測。 - 基礎設施監測: 對于基礎設施如橋梁、管道、電力線路等的監測和維護,傾斜攝影提供了高分辨率、立體感強的影像數據,有助于檢測
用戶_34138
4630 2 8 4
要在全面梳理“低慢小”無人機探測方法的基礎之上,可對各種探測原理進行分析比對,結合市場的信息、實驗研究、仿真驗證等信息,總結出解決“低慢小”無人機探測問題的三個發展趨勢移動探測、融合探測和跟蹤探測。西安知語云智能科技有限公司具有十幾年的專業低慢小無人機反制監測預警干擾打擊設備 目前,能夠在應用于探測“低慢小”無人機的方法,從而信號形式上主要包括雷達探測、激光探測、金屬探測、光電探測、無線電探測和聲

無人機圈
5843 2 7 14
摘 要: 對多旋翼無人機的結構振動問題進行了設計研究。在小型多旋翼無人機上,激光振動儀驗證了加速度傳感器測量振動的可靠性,發現圓形碳纖維臂具有較強的阻尼能力,z軸方向振動最強。實驗表明,多旋翼無人機臂的主要振動為300 Hz以下的低頻振動,主要產生扭轉和彎曲模態。該研究還提出了一種抑制多旋翼無人機振動的改進策略。 關鍵詞:多旋翼無人機;結構振動;低頻;扭轉模態;彎曲模態; 現在無人機系統正朝著提高

小白Johnny
5259 2 6 11
摘 要:【目的】鋁合金起落架在使用過程中,由于其具有質量高的特點會給無人機帶來很多不必要的動能損耗。【方法】課題組以某型號的植保無人機為研究對象,通過制作材料的平替和優化結構設計,使其達到使用要求。對無人機起落架進行UG設計建模以及ANSYS有限元分析,得到起落架對應的應力云圖和變形云圖。材料平替過程中,質量由鋁合金的0.86kg下降到了稀土鎂合金的0.68 kg,質量降低0.18 kg。【結果】

隘路
3663 3
X03無人機中心盤,在頂載荷時的受力分析: 頂部是由兩側各兩個螺紋孔來連接支架,支架作為置物架用來頂載重物。現設頂載重物為3KG,設上殼的支撐是落在六只機臂上的。9.8N/KG*3KG=29.4N SW 位移,合位移量max:1.848e-03mm ANSYS 材料: 最大形變量:1.3552e-03mm 兩者分別為1.848e-03mm和1.3552e-03mm,最大變形量有區別。 最大的變形位

隘路
3885
靜止空氣中六旋翼飛行狀態下對周邊氣流影響分析 考慮掛載載荷時飛機重量為12kg,動力系統提供12kg拉力時每個電機承載約2kg拉力,對應轉速n=3742r/s。 圖1 六旋翼無人機圖 在SolidWorks中簡化模型,分析單一槳葉在正常大氣壓和氣溫下,輸出的擾流結果。參數設置為:環境壓力101.325kpa;槳葉轉速3742r/s;空氣流速0.1m/s。 圖2 單槳葉旋轉流場圖 擴大計算域,顯示單

LYR
1
無人機拋裝置到地面,如何讓裝置穩定的固定到地面不動?說明一下裝置是頂端是天線,中間有一個探測儀,探測儀下面是一個三腳架固定,主要問題是如何才能保證無人機拋投時三腳架固定于地面?
考慮一下不倒翁原理
無人機圈
4899 1 3 1
隨著無人機技術的快速發展,無人機市場正在興起并擴大,無人機在軍用和民用領域均取得蓬勃發展。 民用領域,無人機在農林植保、搶險救災、物流運輸、安防巡檢等方面發揮了重要作用。 軍用領域,無人機因擁有高空、高速、隱身、長航時等特性,在戰場監視、情報搜集、電子偵察、指控通信、電子攻擊、火力打擊等領域承擔起越來越重要的任務。 與此同時,無人機的威脅和風險也逐漸顯露出來。 近幾年,在國外的軍事基地、核電站、油
無人機圈
4586
自俄烏沖突以來,俄軍雖然在戰場上使用了國產自殺式無人機,如“柳葉刀”、KUB等系列無人機,但是俄羅斯遭到歐美制裁后,無人機關鍵零備件或芯片嚴重不足,導致國產無人機總體數量不能滿足作戰部隊需求。鑒于上述原因,俄羅斯引入伊朗無人機用以補充俄軍一線作戰部隊的需求。 伊朗從簡單、輕型無人機系統起步,迄今為止已經生產了包括輕型戰術偵察無人機到重型察打一體等主要類型的無人機,種類齊全。伊朗無人機領域的飛速進步
NASA航天愛好者
4117 4
擺脫歐洲對美以無人機的依賴 綜合西班牙人(EL ESPA?OL)、歐洲國防工業網站(Defence Industry Europe)的報道: 7月25日,西班牙部長理事會批準西班牙國防部與空客防務與航天公司簽訂采購SIRTAP無人機的合同,合同價值約5.95億歐元(6.58億美元),這筆款項“將在2023年至2031年間分為8次年度分期付款”。 該合同包括提供9套完整的SIRTAP無人機系統(每個
無人機圈
3819
各行各業的企業都在利用無人機自動化系統來提高其運營的效率和有效性。無人機憑借著出色的飛行能力以及載荷功能,有著非常廣泛的功能,在各行各業發揮著很大的作用。 無人駕駛飛機簡稱“無人機”,英文縮寫為“UAV”,是利用無線電遙控設備和自備的程序控制裝置操縱的不載人飛機,或者由車載計算機完全地或間歇地自主地操作。 農業方面 中國作為農業大國,擁有18億基本農田,每年需要大量的農業植保作業,現在無人機在農業
aero-engine
6350 2 1 3
作者 昂海松 王源 1 引 言 當前,無人機軍民用技術發展越來越快,應用領域也越來越廣。雖然無人機在陸地領域的用途已日益普及,但是在廣大的海洋領域,還有巨大的應用空間。由于無人機的機動性和使用便捷性,在海岸、海洋資源、水空監視和海事監測等領域也開始運用無人機技術。 基于小型無人航行器體積小、重量輕、布放與運行方便、隱蔽性好、成本低、連續工作時間較長、可回收等優點[1],本文著重研究具有一定航程及任
aero-engine
5437 1 2 5
旋翼無人飛行器具有垂直起降/著陸、可懸停、機動性好及結構簡單等多種優點,無論是在軍事領域還是民用領域,都有非常廣泛的應用價值。 作為垂直/短距起降飛行器,多旋翼無人飛行器不受起降場地的限制,具有很強的適應性,一直是各國軍方關注的焦點。多旋翼無人飛行器與常規的飛行器相比,具有垂直起降、著陸、懸停、縱飛和側飛等飛行特性。隨著近年來微電子、微機械、計算機技術及電池等技術的飛速發展,小型四旋翼無人機的體積
aero-engine
6755 2 1 5
引言 隨著科學技術的快速發展,無人機在許多領域得到了成功的應用 [1] 。目前無人機主要執行的是航拍、監測環境、農業植保等任務載荷,且大部分無人機以多旋翼為主。多旋翼無人機是靠螺旋槳轉速的變化,來調整力和力矩的,實現多旋翼無人機的飛行運動控制。對多旋翼無人機的槳葉來說, 一方面,槳葉尺寸越大,越難以迅速改變其速度。也正是因為如此,無人直升機主要是靠改變槳距而不是速度來改變升力。另一方面,在大載重下
無人機圈
7334 1 2 3
無人機航拍攝影是以無人駕駛飛機作為空中平臺,以機載遙感設備,如輕型光學相機、紅外掃描儀,激光掃描儀、磁測儀等獲取信息,用計算機對圖像信息進行處理,并按照一定精度要求制作成圖像的技術。它具有高清晰、大比例尺、小面積、高現勢性、小型輕便、高效機動的優點,起飛降落受場地限制較小,在操場、公路或其它較開闊的地面均可起降,其穩定性、安全性較好,而且轉場非常容易,廣泛應用于國家生態環境保護、礦產資源勘探、自然
無人機圈
4680 2
一、 飛行仿真技術簡介 系統仿真,是將被研究的對象按其特征抽象成模型,通過對模型的仿真操作及仿真結果的分析,探討和推斷對象本身所具有的性質及其運動變化規律的一門綜合性學科。當今世界,隨著軍事和科學技術的迅猛發展,仿真已成為各種復雜系統研制工作的一種必不可少的手段,據統計,采用系統仿真后,可使靶彈、實彈減少6%—30%,研制費用節省10%—40%,研制周期縮短30%—40%,尤其是在航空航天領域,仿
無人機10086
5637
遙控器用于用戶手動操縱指令傳達。除此之外,四旋翼無人機還需要與地面站或其他四旋翼有數據交互,用于狀態監控,集群協同等 一 硬件與協議 無人機與外界通信主流方案包括三種:WiFi,藍牙,2.4G無線數傳。其中WiFi與藍牙也是傳輸信號也在2.4G頻段,一般硬件設備都內置有WiFi,藍牙功能,2.4G收發端都需要額外配置模塊 也有部分數傳模塊可以工作在433MHz、915MHz頻段,相同功率,頻率低衍
無人機10086
3953 3 3
21世紀初,軍用無人系統的部署和使用已成為發達國家提升部隊作戰能力的一個決定性因素。目前,無人系統正在從新質武器的形成階段向部署應用的強化階段過渡。 一、地面、空中和海上無人系統應用現狀 目前,大多數無人系統的應用任務仍然是戰術性的,軍事無人系統集群應用的指揮和控制也仍然處于戰術層面。隨著許多國家在一系列無人系統的決定性技術領域取得了多項重大突破,預計在未來10到15年內,無人系統對戰術任務和戰略
ALTAIR
4475 3 5 4
“ 四旋翼無人機的飛行原理 直升機有尾旋翼的設計是為了抵消主旋翼旋轉時產生的旋轉力矩,如果沒有尾旋翼直升機的機體會向著主旋翼旋轉方向相反的方向自旋。而四旋翼無人機采用十字型對稱分布,四個旋翼互相抵消回旋影響,當平衡飛行時,陀螺效應和空氣動力扭矩效應均被抵消。如果想轉向的話,只要打破這個平衡就可以了。 按照圖中的旋轉方向,增加 1、4 的轉速減少 2、3 的轉速可以產生逆時針轉動;反之,減少 1、4
熱榜
1月1年全部
文章
視頻
問答
1月1年總榜