



Abaqus熱傳遞與熱應(yīng)力(理論及實(shí)操) 

實(shí)例演練(三)-平板焠火全耦合分析實(shí)例演練(四)-煞車盤全耦合分析---------------------------------------
4530 30
鄭鈞 Adam ??? 6年前
UWB測距的遮蔽區(qū)界址點(diǎn)空地組網(wǎng)定位研究 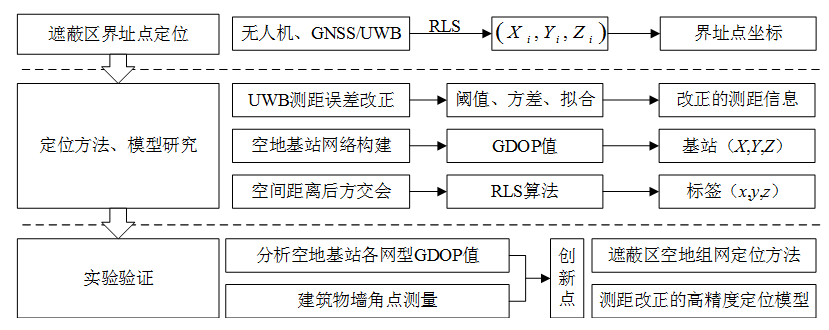
圖5 空地組網(wǎng)定位模型3 實(shí)驗(yàn)分析針對半遮蔽區(qū)界址點(diǎn)定位實(shí)際情景,本文設(shè)定了6種無人機(jī)布設(shè)方案,并通過仿真實(shí)驗(yàn)和實(shí)測靜態(tài)定位實(shí)驗(yàn),分析無人機(jī)網(wǎng)型對定位結(jié)果的影響;然后建立UWB測距誤差改正模型,進(jìn)行建筑物墻角點(diǎn)的定位實(shí)驗(yàn)。3.1 仿真實(shí)驗(yàn)分析在仿真實(shí)驗(yàn)測試中,設(shè)計(jì)了Y型、T型、正方型、菱型、一字型和梯型6種基站布設(shè)網(wǎng)型,分析同一高度面GDOP值分布。
3880
繪夢流光 ??? 3年前
普通雙葉螺旋槳的壓力波動及噪聲解析 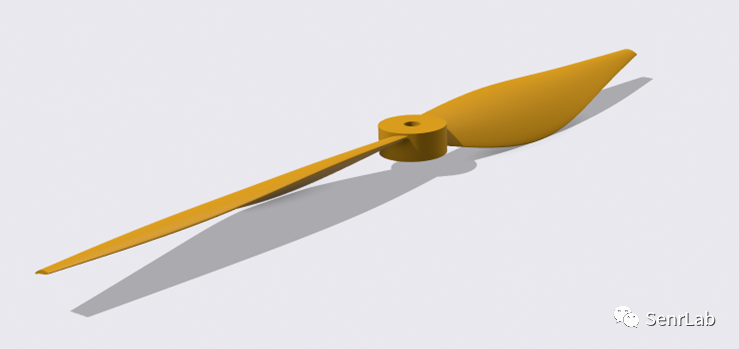
仿真計(jì)算壓力變動結(jié)果 1.緒論 近年來,無人機(jī)(Unmanned Aerial Vehicle: UAV)已在全球范圍內(nèi)被廣泛應(yīng)用于各種用途,例如農(nóng)藥噴灑、架線工程、貨物運(yùn)輸、偵察、戰(zhàn)術(shù)轟炸等等。
3914
aero-engine ??? 2年前

技術(shù)鄰APP
工程師必備
工程師必備
- 項(xiàng)目客服
- 培訓(xùn)客服
- 平臺客服
TOP
