仿真計(jì)算壓力變動(dòng)結(jié)果
1.緒論
近年來,無人機(jī)(Unmanned Aerial Vehicle: UAV)已在全球范圍內(nèi)被廣泛應(yīng)用于各種用途,例如農(nóng)藥噴灑、架線工程、貨物運(yùn)輸、偵察、戰(zhàn)術(shù)轟炸等等。由于無人機(jī)的推進(jìn)器是螺旋槳,因此螺旋槳的性能直接影響無人機(jī)的空氣動(dòng)力性能和噪音大小。隨著空中物流和飛行汽車的出現(xiàn),未來將有許多無人機(jī)在城市上空飛行,因此螺旋槳噪音將在城市中給人們帶很大困擾,這也是飛行汽車等推行困難的原因之一。因此,很有必要降低螺旋槳產(chǎn)生的噪音。在無人機(jī)產(chǎn)生的噪音中,最大的是螺旋槳在切割空氣時(shí)產(chǎn)生的噪音,特別是在旋翼機(jī)中,通常需要高速旋轉(zhuǎn)多個(gè)螺旋槳,因此會(huì)產(chǎn)生非常大的噪音。過去的很多研究已經(jīng)調(diào)查了翼形對空氣動(dòng)力性能和噪音的影響。近年來,麻省理工學(xué)院(MIT)的林肯研究所發(fā)表聲明稱,環(huán)形螺旋槳具有低噪音和高效率的特性(1)。同年,日本航天局JAXA也證實(shí)了其獨(dú)特技術(shù)開發(fā)的低噪音螺旋槳“Looprop”有很好的靜音效果(2)。Sharrow Marine公司已經(jīng)實(shí)現(xiàn)了船用環(huán)形螺旋槳的商業(yè)化,但無人機(jī)用環(huán)形螺旋槳目前仍在研究中。本研究關(guān)注普通的雙葉片螺旋槳,通過CFD數(shù)值計(jì)算和實(shí)驗(yàn),查明了螺旋槳葉片壁的壓力變化以及在不同轉(zhuǎn)速下產(chǎn)生的噪音大小。
2.螺旋槳形狀模型(3)
2.1 NACA 4-Digit翼型
本研究使用的螺旋槳如圖1所示。根據(jù)表1,螺旋槳的半徑R為0.15米,中心半徑R0為0.03米。螺旋槳有2片葉片,斷面翼型為NACA 6412。表2是從中心到葉片末端的局部剖面安裝角α和局部剖面弦長c的參數(shù)。
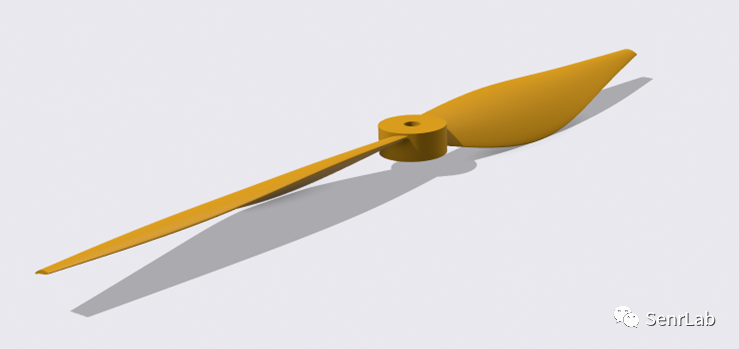
Fig. 1. Propeller model.
Table. 1 Design conditions.
Airfoil profile |
NACA 6412 |
Radius of hub R0[m] |
0.03 |
Radius of blade R[m] |
0.15 |
Number of blades B |
2 |
Table. 2 local installation angle and Wing chord length.
r[m] |
α[°] |
c[m] |
0.2 |
32.48 |
0.021 |
0.4 |
21.70 |
0.028 |
0.6 |
14.86 |
0.027 |
0.8 |
11.25 |
0.022 |
0.1 |
9.04 |
0.016 |
0.15 |
5.62 |
0.006 |
3.螺旋槳流體聲音的理論分析(4)
3.1葉片周圍的流體噪音
在亞音速流中,物體周圍產(chǎn)生的噪音是由存在于物體周圍不穩(wěn)定流中的渦旋引起的加速度運(yùn)動(dòng)所伴隨的壓力變動(dòng)引起的。這些壓力變動(dòng)最終反映在物體表面的壓力變動(dòng)上。根據(jù)Lighthill-Curle理論,在流體經(jīng)過物體時(shí),由于流體力在物體表面的壓力隨時(shí)間的變化而產(chǎn)生氣動(dòng)聲。物體表面的壓力變動(dòng)是由邊界層擾動(dòng),主要是上游擾動(dòng)、尾流渦流引起的。對于螺旋槳來說,后兩者的影響很大,而且加上翼尖端的渦流影響也很大。
3.2旋轉(zhuǎn)流體音
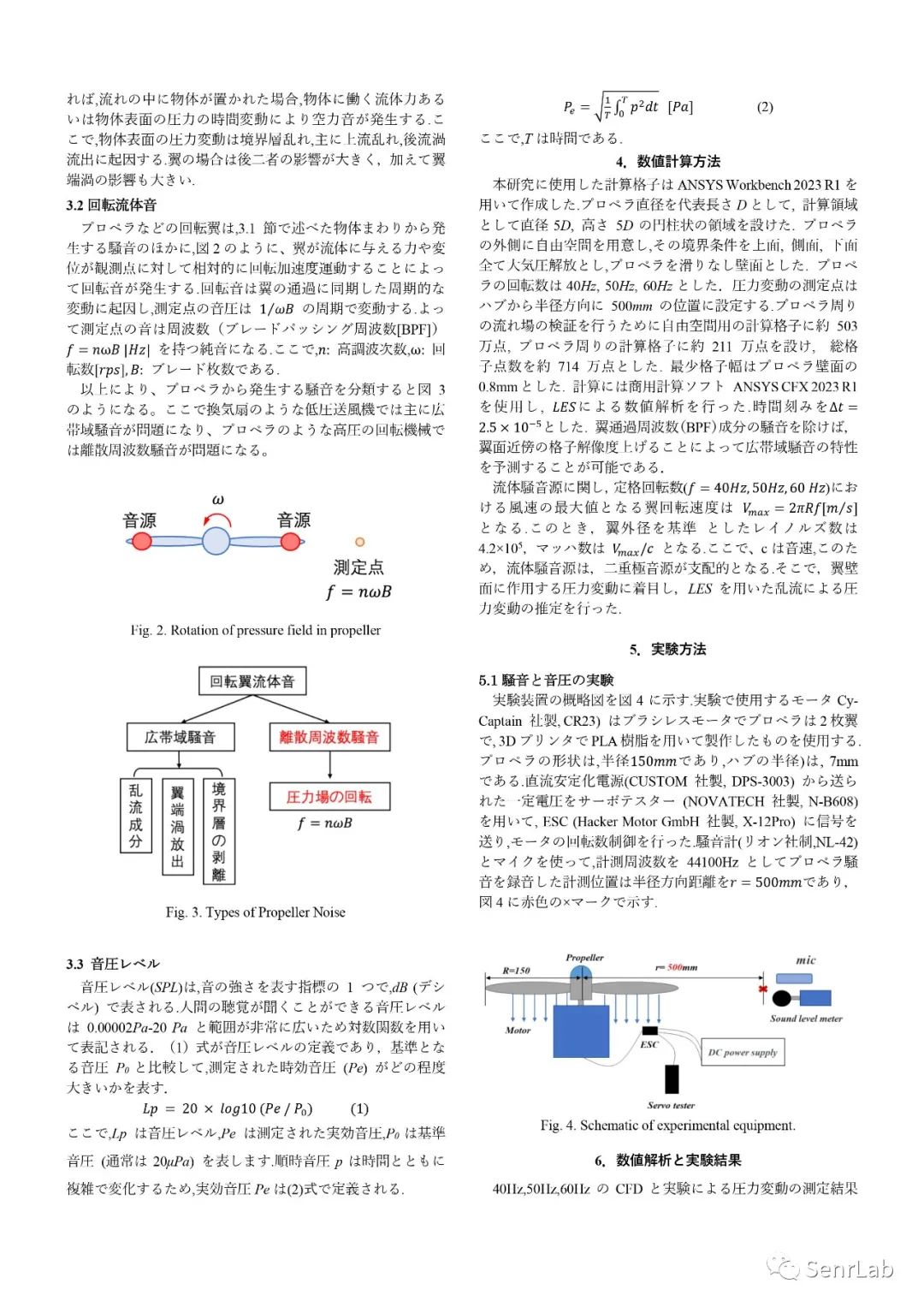
旋轉(zhuǎn)的螺旋槳不僅會(huì)有上述的產(chǎn)生的流體噪音,還會(huì)產(chǎn)生旋轉(zhuǎn)噪音,因?yàn)槁菪龢男D(zhuǎn)引起了空氣流動(dòng)的擾動(dòng)。在螺旋槳旋轉(zhuǎn)時(shí),高壓區(qū)和低壓區(qū)交替出現(xiàn),這會(huì)導(dǎo)致空氣的速度和壓力的變化。這些速度和壓力的變化將導(dǎo)致在螺旋槳前后形成一個(gè)高壓區(qū)和低壓區(qū)的交替區(qū)域,螺旋槳葉片通過空氣產(chǎn)生了周期性的壓力變化,這些壓力變化在周圍的空氣中形成了壓力波。這些壓力波隨著時(shí)間的推移,以與螺旋槳旋轉(zhuǎn)頻率相同的頻率擴(kuò)散到周圍的空氣中,到達(dá)觀測點(diǎn)的聲壓也會(huì)隨之產(chǎn)生周期為1/ωB的變化。因此,觀測點(diǎn)的聲音會(huì)變成頻率為(葉片通過頻率[BPF])f = nωB [Hz]的純音,形成了離散頻率噪聲。其中,n是諧波階數(shù),ω是旋轉(zhuǎn)速度[rps],B是葉片數(shù)。
綜上所述,從螺旋槳產(chǎn)生的噪聲可分為圖3所示的兩類。在低壓送風(fēng)機(jī)(如通風(fēng)扇)中,主要問題是寬頻噪音,而在高壓旋轉(zhuǎn)機(jī)(如螺旋槳)中,離散的頻率噪音是主要噪音。
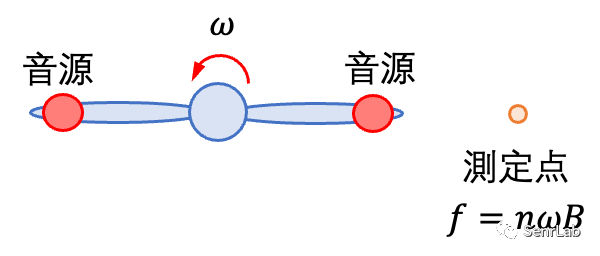
Fig. 2. Rotation of pressure field in propeller
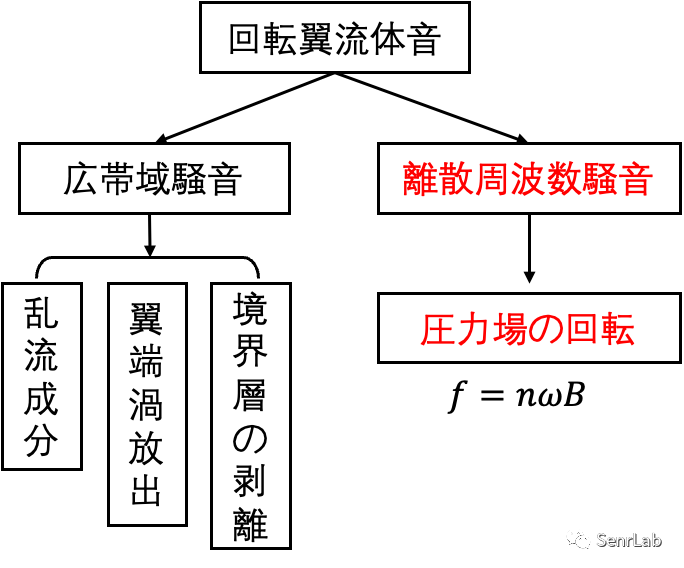
Fig. 3. Types of Propeller Noise
3.3 聲壓級
聲壓級(SPL)是衡量聲音強(qiáng)度的一種指標(biāo),以分貝(dB)表示。人類聽覺所能聽到的聲壓級范圍非常廣,從0.00002Pa到20 Pa,因此使用對數(shù)函數(shù)表示會(huì)更加方便。(1)式是聲壓級的定義,它是測量到的等效聲壓(Pe)與參考聲壓P0的比值。

這里的Lp表示聲壓級,Pe表示測量得到的有效聲壓,P0表示基準(zhǔn)聲壓(通常為20微帕,也是人類能聽到的最小聲壓級),瞬時(shí)聲壓p會(huì)隨時(shí)間變化而變得十分復(fù)雜,因此轉(zhuǎn)換為有效聲壓Pe更容易計(jì)算,公式如(2)所示。
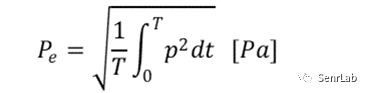 (2)
(2)
4.數(shù)值仿真計(jì)算方法
這里使用ANSYS Workbench 2023 R1創(chuàng)建計(jì)算網(wǎng)格,將螺旋槳直徑設(shè)置為代表長度D,并設(shè)置直徑為5D、高度為5D的圓柱形區(qū)域作為計(jì)算域。在螺旋槳外側(cè)設(shè)置了自由空間,并將其上、側(cè)、下邊界條件全部設(shè)置為大氣壓開放狀態(tài),將螺旋槳葉片設(shè)置為無滑移壁面。螺旋槳轉(zhuǎn)速分別為40Hz、50Hz、60Hz。測量壓力波動(dòng)的點(diǎn)設(shè)置在距離軸心500mm半徑方向的位置。為了驗(yàn)證螺旋槳周圍的流場,我們在自由空間的計(jì)算網(wǎng)格上劃分了約503萬個(gè),在螺旋槳周圍的計(jì)算網(wǎng)格上劃分了約211萬個(gè),總網(wǎng)格點(diǎn)數(shù)約為714萬個(gè)。最小網(wǎng)格尺寸在螺旋槳壁面附近為0.8mm。接著使用商用計(jì)算軟件ANSYS CFX 2023 R1進(jìn)行了LES大渦模型數(shù)值分析,時(shí)間步長為Δt=2.5×10^(-5)。除了葉片通過頻率(BPF)成分的噪音外,通過提高翼面附近的網(wǎng)格分辨率,也可以預(yù)測到寬帶噪音的情況。
對于流體噪聲源,定額轉(zhuǎn)速(f=40Hz、50Hz、60Hz)下的風(fēng)速最大值對應(yīng)的葉片轉(zhuǎn)速為Vmax=2πRf[m/s]。此時(shí),以葉片外徑為基準(zhǔn)的雷諾數(shù)為4.2×10^5,馬赫數(shù)為Vmax/c。因此,流體噪聲源由二重極聲源主導(dǎo)。因此,我們著眼于作用在翼壁上的壓力波動(dòng),并使用LES預(yù)測了由湍流引起的壓力波動(dòng)。
5.實(shí)驗(yàn)方法
5.1噪聲和聲壓實(shí)驗(yàn)
圖4是實(shí)驗(yàn)裝置的概要圖。實(shí)驗(yàn)中使用的動(dòng)力源是Cy-Captain公司生產(chǎn)的無刷電機(jī)CR23,螺旋槳為雙葉片,使用3D打印機(jī)和PLA樹脂制作。螺旋槳的直徑為150mm,中心半徑為7mm。使用直流穩(wěn)定電源(CUSTOM公司制造的DPS-3003)向控制器(NOVATECH公司制造的N-B608)發(fā)送恒定電壓信號,以控制電子速度控制器(Hacker Motor GmbH公司制造的X-12Pro)來控制電機(jī)的轉(zhuǎn)速。使用分貝儀(由Rion公司制造的NL-42)和麥克風(fēng)以44100Hz的采樣頻率錄制了螺旋槳噪音。測量位置位于半徑方向距離為r=500mm處,用紅色的叉號在圖4中表示。
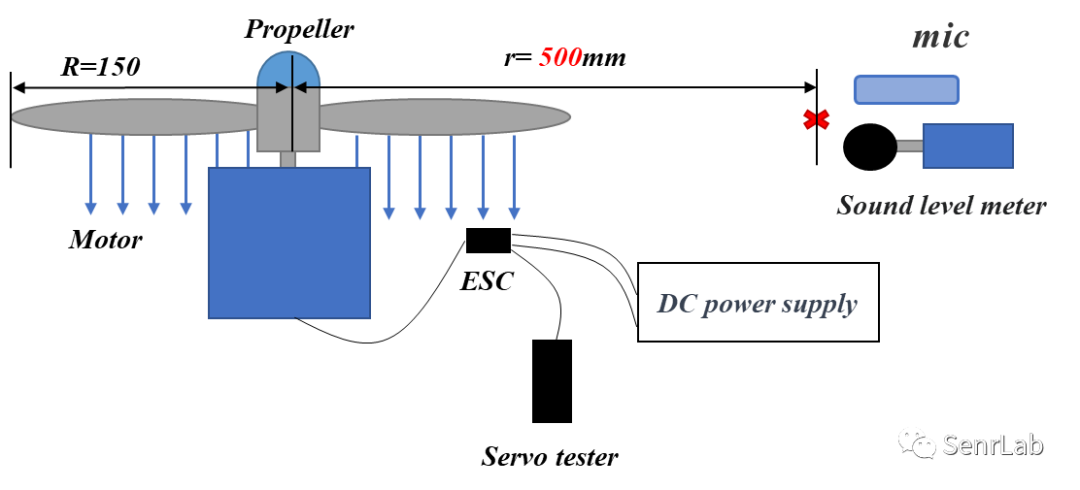
Fig. 4. Schematic of experimental equipment.
6.?dāng)?shù)值分析和實(shí)驗(yàn)結(jié)果
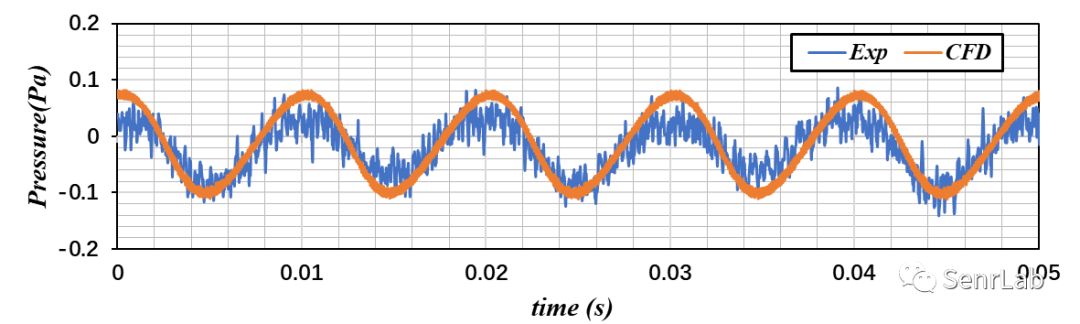
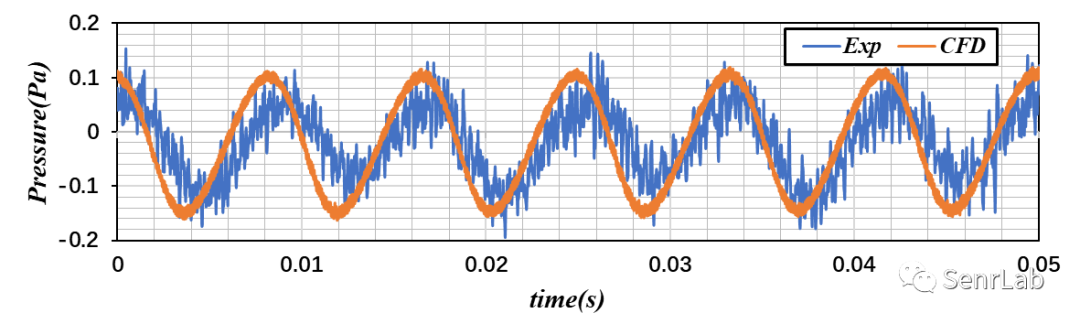
圖5是CFD和實(shí)驗(yàn)測量得到的40Hz、50Hz和60Hz壓力波動(dòng)結(jié)果。橫軸為時(shí)間t(0秒-0.05秒),縱軸為壓力P(-0.2Pa-0.2Pa)。紅線表示CFD結(jié)果,藍(lán)線表示實(shí)驗(yàn)結(jié)果。從圖5可以看到波狀的壓力波動(dòng)。圖5(a)的周期ΔT為0.0125秒,頻率為1/0.0125=80Hz。同樣,圖5(b)的周期ΔT為0.01秒,頻率為1/0.01=100Hz,圖5(c)的周期ΔT為0.0081秒,頻率為1/0.0082=122Hz。因此,通過本研究可知,普通雙螺旋槳噪音主要是由頻率(f=旋轉(zhuǎn)速度ω×葉片數(shù)B)構(gòu)成的純音。

Pressure fluctuation at 40 Hz
Pressure fluctuation at 40 Hz
Pressure fluctuation at 40 Hz
Fig. 5. Pressure fluctuation.
圖5(a),(b),(c)的頻譜圖如圖6所示。實(shí)線是CFD的結(jié)果,虛線是實(shí)驗(yàn)的結(jié)果。藍(lán)色,綠色,紅色分別表示40Hz,50Hz,60Hz,橫軸表示旋轉(zhuǎn)頻率與頻率比,縱軸表示聲壓級。聲壓級由公式(1)計(jì)算得出。從圖6可以看出,在所有旋轉(zhuǎn)頻率下,都觀察到頻率比2附近的峰值。旋轉(zhuǎn)頻率60Hz的峰值最高,隨著旋轉(zhuǎn)頻率的降低,峰值高度也減小。在頻率比4、6的附近也觀察到峰值,表明在本研究中所研究的螺旋槳噪音中,離散頻率噪音是主要的。
螺旋槳產(chǎn)生離散頻率噪聲的主要原因是螺旋槳的旋轉(zhuǎn)引起了空氣流動(dòng)的擾動(dòng)。在螺旋槳旋轉(zhuǎn)時(shí),高壓區(qū)和低壓區(qū)交替出現(xiàn),這會(huì)導(dǎo)致空氣的速度和壓力的變化。這些速度和壓力的變化將導(dǎo)致在螺旋槳前后形成一個(gè)高壓區(qū)和低壓區(qū)的交替區(qū)域,螺旋槳葉片通過空氣產(chǎn)生了周期性的壓力變化,這些壓力變化在周圍的空氣中形成了壓力波。這些壓力波隨著時(shí)間的推移,以與螺旋槳旋轉(zhuǎn)頻率相同的頻率擴(kuò)散到周圍的空氣中,形成了離散頻率噪聲。
圖7是從圖5(a)、(b)、(c)的聲壓計(jì)算出的全音壓級的結(jié)果,聲壓級的轉(zhuǎn)換方法由公式(1)和(2)得出。不管旋轉(zhuǎn)頻率如何,CFD預(yù)測的聲壓值比實(shí)驗(yàn)值高約2dB,存在過高評估的趨勢。
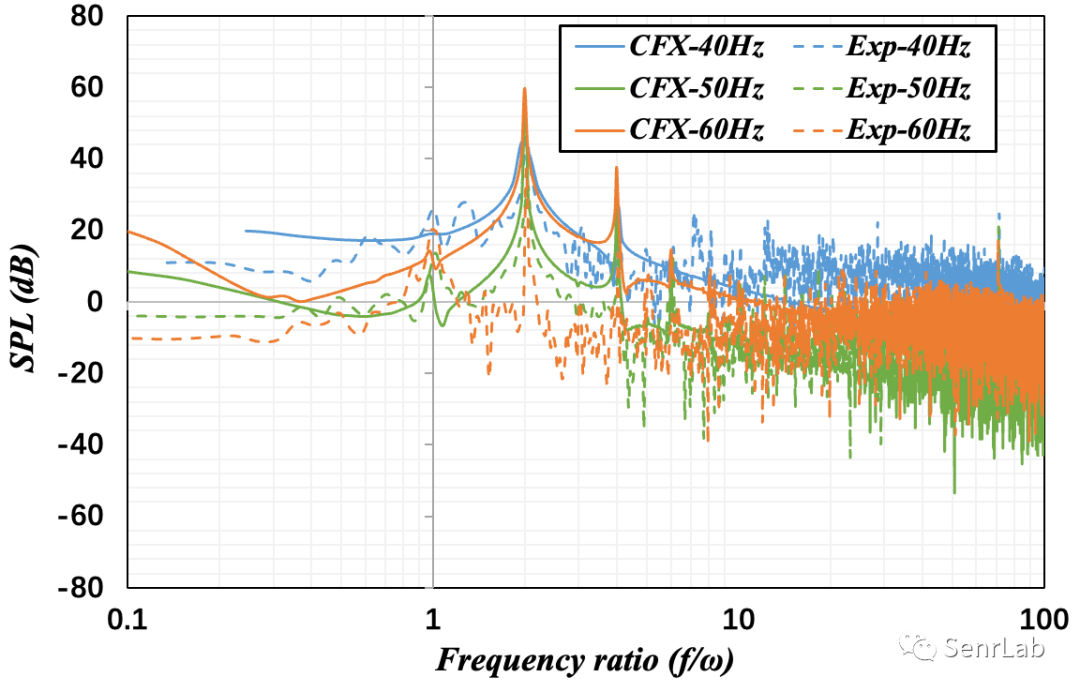
Fig. 6. FFT spectra of CFD at 10 Hz in Radial position.
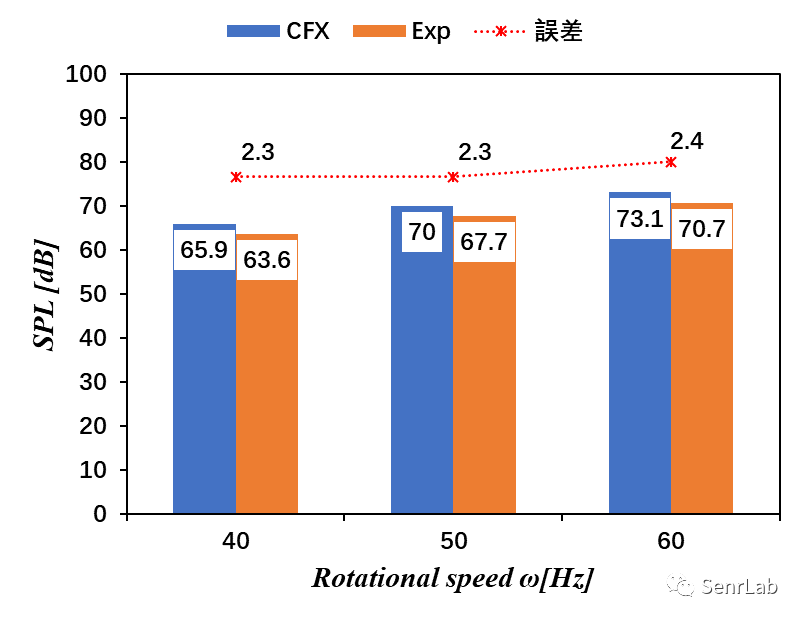
Fig.7. SPL at different rotational speeds.
7.結(jié)論以及展望
本研究調(diào)查了常見的雙葉槳壓力變化和噪音問題,并確認(rèn)離散頻率噪音占主導(dǎo)地位。此外,還清晰地觀察到由旋轉(zhuǎn)速度(f=轉(zhuǎn)速ω×葉片數(shù)B)構(gòu)成的純音。發(fā)現(xiàn)隨著轉(zhuǎn)速的增加,純音的聲壓級也會(huì)增加。將來將研究不同環(huán)形槳的聲壓變化和噪音,以比較其靜音性。
8. 參考文獻(xiàn)
(1) Toroidal Propeller Research Team, "Toroidal Propeller," MIT Lincoln Laboratory, 2023-2, https://www.ll.mit.edu/sites/default/files/other/doc/2022-09/TVO_Technology_Highlight_41_Toroidal_Propeller.pdf,(參照2023-03)
(2) 國立研究開発法人宇宙航空研究開発機(jī)構(gòu),“JAXAとACSLが低騒音プロペラ(Looprop)の設(shè)計(jì)手法の高度化に関する共同研究で靜音効果を確認(rèn),”JAXA,2023-03-16,https://www.jaxa.jp/press/2023/03/20230316-1_j.html,(參照2023-4)
(3) 齋藤 明徳ら, 汎用CADによる風(fēng)車ブレードの高精度3Dモデリング, 設(shè)計(jì)工學(xué), Vol.49, No.1 (2014年1月).
(4) 吉川 茂,和田 仁,音源の流體音響學(xué),日本音響學(xué)會(huì)編,コロナ社,pp109-127(2007)
論文原文
文章來源:SenrLab


























