



粒子群算法PSO與MATLAB程序視頻教程動態(tài)優(yōu)化及多目標優(yōu)化 

【內(nèi)容簡介】《粒子群算法與應(yīng)用和MATLAB程序詳解視頻》共15章186節(jié)視頻,總學時1917分鐘,合32小時。
910 1 10
鄭一 ??? 7年前
11基于matlab的多目標粒子群算法,MOPSO,引導種群逼近真實Pareto前沿,算法運行結(jié)束后 
基于matlab的多目標粒子群算法,MOPSO,引導種群逼近真實Pareto前沿,算法運行結(jié)束后將外部存檔中粒子作為獲得的Pareto最優(yōu)解近似。程序已調(diào)通,可以直接運行。
2387 1
matlab應(yīng)用與學習 ??? 2年前
基于pytorch的多目標粒子群算法 
基于pytorch的多目標粒子群算法,MOPSO,引導種群逼近真實Pareto前沿,算法運行結(jié)束后將外部存檔中粒子作為獲得的Pareto最優(yōu)解近似。程序已調(diào)通,可以直接運行,標價為程序價格,不包含售后。程序保證可直接運行。
1807
explicit ??? 2年前
1-05基于pytorch的多目標粒子群算法 
基于pytorch的多目標粒子群算法,MOPSO,引導種群逼近真實Pareto前沿,算法運行結(jié)束后將外部存檔中粒子作為獲得的Pareto最優(yōu)解近似。程序已調(diào)通,可以直接運行。購買后可下載視頻中的源程序文件。
209
matlab應(yīng)用與學習 ??? 1年前
1-11 基于matlab的多目標粒子群算法 
基于matlab的多目標粒子群算法,MOPSO,引導種群逼近真實Pareto前沿,算法運行結(jié)束后將外部存檔中粒子作為獲得的Pareto最優(yōu)解近似。程序已調(diào)通,可以直接運行。PS:程序運行視頻見https://gf.bilibili.com/item/detail/1103082078 購買后可下載視頻中的源程序文件。
257
matlab應(yīng)用與學習 ??? 1年前
ZEMAX軟件技術(shù)應(yīng)用專題:如何在OpticStudio中設(shè)計DOE透鏡或超穎透鏡 
許多設(shè)計過程需要兩種不同的光學理論/算法來分別處理光束在自由空間和微結(jié)構(gòu)中的傳播,而其他一些過程僅使用純光線追跡來達到目標。由於模擬技術(shù)發(fā)展迅速,因此本文可能沒有涵蓋所有可用方法。如果用戶提供新訊息或有任何要求,請隨時與我們聯(lián)繫,我們可以相應(yīng)地更新本文。
2186
w**elab86_Swsp ??? 3年前
常用參數(shù)自動標定算法總結(jié)(單純形,遺傳算法,貝葉斯優(yōu)化算法,粒子群算法等) 
在本推文中介紹四類常用參數(shù)自動標定方案,分別是單純形方案,粒子群方案,遺傳算法方案,以及貝葉斯優(yōu)化ego方案。單純形方案實現(xiàn)最簡單,適用于少參數(shù),更窄的初始區(qū)間粒子群方案,遺傳算法方案適用于多參數(shù)更大的空間適合全局搜索ego方案相比于其余三類方案的優(yōu)勢體現(xiàn)為EGO使用代理模型(如高斯過程回歸)來預測目標函數(shù),極大減少了實際函數(shù)評估次數(shù)。
2569 1
晶體塑性有限元 ??? 1年前
基于粒子群優(yōu)化算法的六自由度機械臂三維空間避障規(guī)劃 
終止條件:算法迭代達到預設(shè)的最大次數(shù)或全局最優(yōu)值的改進小于預設(shè)閾值時,終止迭代。具體求解步驟 初始化粒子群:在三維空間內(nèi)隨機生成多個粒子,每個粒子表示一條從起始點到目標點的路徑。 計算適應(yīng)度值:對每個粒子,計算其路徑的適應(yīng)度值,包括路徑長度和是否與障礙物相交等因素。 迭代優(yōu)化: 根據(jù)速度和位置更新公式,更新每個粒子的速度和位置。
2409
320科技工作室 ??? 1年前
Ansys Zemax光學設(shè)計軟件技術(shù)教程:眼科鏡片設(shè)計 
舉例來說,以近軸成像(只有單一視場0°)以及光視覺(photopic)為目標的鏡片具有負的基本曲線,約為-5.50D。另一方面,閱讀用的透鏡設(shè)計通常會有較高的前表面屈光率。在OpticStudio中建立相關(guān)模型,我們可以得到下方圖中的結(jié)果,一個能供具有老花眼和-5.50D近視的使用者配戴的優(yōu)化透鏡。此鏡片的屈光率為-3.00D,並能在距透鏡40公分處匯聚光線,形成適宜的閱讀距離。
2212
w**elab86_Swsp ??? 3年前
ZEMAX軟件技術(shù)應(yīng)用專題:在 OpticStudio 中模擬高階雷射光束 
這種發(fā)散行為是計算算法的限制。當達到發(fā)散點時,Ince-Gaussian DLL 產(chǎn)生的結(jié)果變得不準確。不幸的是,對於唯一的 e 值,這一點不會出現(xiàn)(還依賴於 p、m 和光束極性)。但是,確定何時產(chǎn)生不同的解決方案很簡單。該解決方案與相應(yīng)的 Hermite-Gaussian 結(jié)果不一致(對於大 e,它們應(yīng)該如此)。在這種情況下,應(yīng)使用高斯束腰光束選項來模擬光束模式。
2057
w**elab86_Swsp ??? 3年前
Moldex3D模流分析之Tokyo Seiki公司使用模流大幅減少試模次數(shù) 
以摩托車的喇叭按鍵孔為例,此塑件在組裝後續(xù)需承受多次的受力,故塑件成型過程中需避免結(jié)合線發(fā)生在受力區(qū)域。結(jié)合線是減弱成品強度的其中因素之一,所以由分析的結(jié)果可知原始設(shè)計的結(jié)合線位置剛好落在成品受力面,產(chǎn)品有強度不足的疑慮,移動澆口位置可以有效改善此問題。
2210
Moldex3D 中國 ??? 3年前
Lumerical案例 | 基于粒子群優(yōu)化的雙波段MIM濾波器引領(lǐng)高靈敏度檢測革新 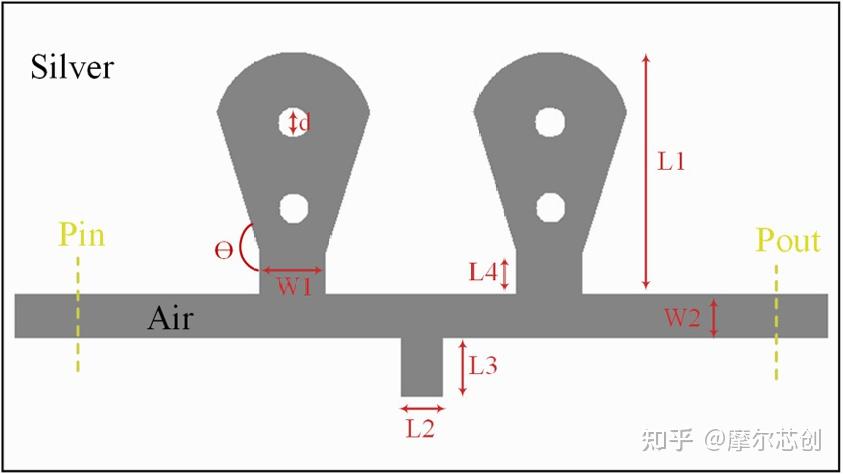
粒子群優(yōu)化算法的精準調(diào)控為突破傳統(tǒng)優(yōu)化方法的瓶頸,本研究引入粒子群優(yōu)化(PSO)算法對濾波器尺寸進行全局優(yōu)化。在優(yōu)化過程中,PSO算法的目標函數(shù)被設(shè)計為優(yōu)化MIM濾波器的傳輸特性。該算法尋求最大化通帶中的傳輸速率,并最小化截止帶中的傳輸速率(接近于零),以確保有效的濾波性能:其中T(λ)為波長λ處的傳輸率, 和 分別代表通帶和截止帶波長。
2488
摩爾芯創(chuàng) ??? 4月前
無人機導航定位系統(tǒng)關(guān)鍵技術(shù)研究 
它配備了單目、雙目和RGB相機接口。由于缺乏全球定位,SLAM技術(shù)受到越來越多的定位誤差影響。單目SLAM算法在機器人高速運動時會出現(xiàn)尺度不確定的問題。很快,閉環(huán)誤差將變得太大而無法解決。 為了解決這個問題,人們還提出加攝像頭生成雙目SLAM,或者加IMU生成耦合視覺慣性導航定位系統(tǒng)。初始粒子的位置可以通過視覺測量算法測量的運動變化來跟蹤,而不是在沒有測量的情況下隨機移動它們。
2324
無人機圈 ??? 4年前
HGWOSCA-改進的灰狼優(yōu)化算法1(Matlab) 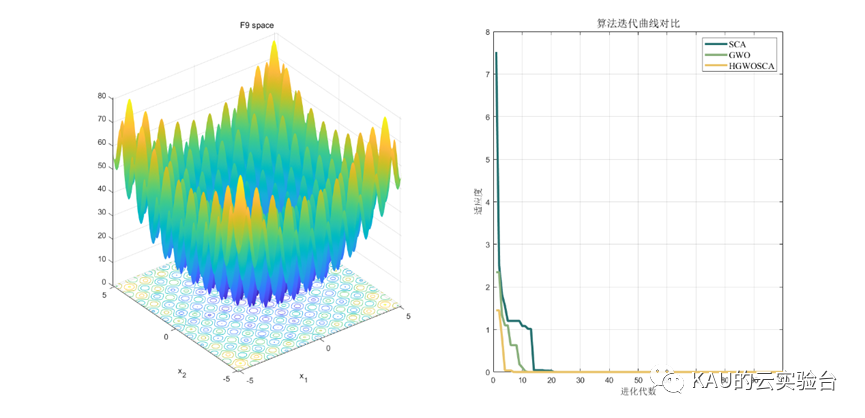
,策略有如下幾點:由于GWO算法本身不涉及個體歷史最優(yōu)信息,也即是無記憶種群,因此可以學習粒子群算法的策略,將個體歷史最優(yōu)引入包圍行為中,同時,由于領(lǐng)頭狼包含α、β、δ,這三個頭狼協(xié)同引領(lǐng)了群體進化的方向,因此可以將SCA算法應(yīng)用于這三頭狼來增加其搜索空間,有助于GWO的全局搜索等等,具體策略在作者后面的文章將進行更新,歡迎關(guān)注~ 參考文獻 [1]MIRJALILI S,
2760
Matlab心得交流 ??? 2年前
孟錦豪等:基于NSGA-II遺傳算法的鋰電池均衡指標優(yōu)化 
求解多目標問題目前常見的算法有帕累托差分進化算法(Pareto-based differential evolution,PDE)、多目標差分進化算法(multi-objective differential evolution,MODEA)、多目標粒子群優(yōu)化算法(multi-objective particle swarm optimization,MOPSO)及多目標遺傳算法(multi-objective
5047 4 2
能源阿陽 ??? 2年前
鋰離子動力電池壽命預測的研究進展 
Long 等利用改進的自回歸(AR)模型對鋰離子電池退化容量進行跟蹤,在模型定階時采用粒子群算法,實現(xiàn)對電池的壽命預測,結(jié)果具有較高的精度。
2611 1
駕駛哥 ??? 3年前
ZEMAX軟件技術(shù)應(yīng)用專題:利用Kogelnik方法模擬體積全像光柵的繞射效率 
相反,光柵的表面是由周期性的微結(jié)構(gòu)組成的。為了對SRG進行建模,需要採用類似傅里葉模態(tài)法(也叫RCWA)的算法。本文將介紹VHG的工具。關(guān)於SRG的工具,請參見知識庫文章Simulating diffraction efficiency of surface-relief grating using the RCWA method。
2121
w**elab86_Swsp ??? 3年前
智能制造的核心技術(shù)之智能調(diào)度 
在調(diào)度領(lǐng)域中,常見的群智能優(yōu)化算法有粒子群算法(particle swarm optimization,PSO)、蟻群算法(ant colony optimization,ACO)等。
2675
陽普科技 ??? 3年前
基于精準碰撞檢測算法的機械臂避障軌跡規(guī)劃 
江鴻懷提出基于粒子群優(yōu)化算法的五自由度機械臂軌跡規(guī)劃 [15],該算法對機械臂運動軌跡的長度及角度進行優(yōu)化,但是粒子群算法容易陷入局部最優(yōu),所求解并非最優(yōu)解。綜上所述,上述均為對存在多種形狀的障礙物的環(huán)境進行有效的避障軌跡規(guī)劃。本論文提出一種基于精確碰撞檢測的機械臂避障軌跡規(guī)劃。該方法能夠完成在不同形狀障礙物下的避障要求,并且可以在避開障礙物的同時對機械臂運動軌跡進行最大限度的優(yōu)化。
3492 6 3
機械設(shè)計師 ??? 4年前
【精彩回顧】國產(chǎn)仿真模型+先進智能算法,遠算科技參加2023智慧水利建設(shè)論壇 
視頻測流水利感知系統(tǒng)遠算科技水利應(yīng)用場景廣泛,創(chuàng)新性研發(fā)了視頻測流水利感知系統(tǒng),以先進AI智能算法正射矯正處理原有圖像,識別捕捉水流示蹤粒子,計算全場河面水流速度,零門檻,易操作,實現(xiàn)1部手機、10秒視頻,3步完成專業(yè)水流測速。
2119
CAE璐姐 ??? 2年前
20條/頁 
跳至頁

技術(shù)鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP
