



使用 Lumerical 對 VCSEL 激光器進行增益仿真 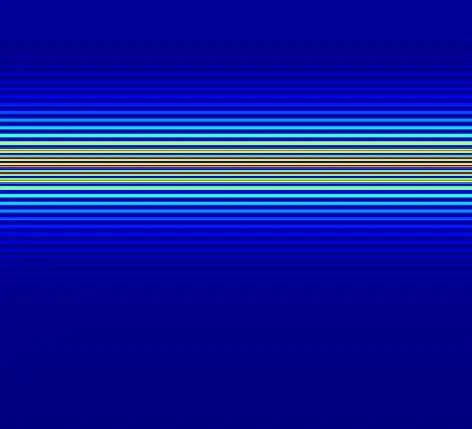
場輪廓看起來也很相似,盡管場強度比未加增益時大很多。最后,我們可以使用腳本gain_VCSEL_trans.lsf在同一幅圖上繪制從激光器頂面發射的功率和有源區增益曲線。可以看出,盡管這種材料具有寬帶增益,我們也只能看到在共振頻率處的強放大。
2578
Ansys中國 ??? 2年前
多旋翼無人機的振動實驗和仿真分析 
為了準確獲取無人機振動信息,本研究使用了以下測量設備:(1)Polytec PSV-500 SCANNING HEAD掃描激光振動儀;(2)ADXL355三軸加速度傳感器。掃描式激光振動儀頻率范圍0~25 MHz,最大速度±30 m/s,工作距離0.125~50 m;三軸加速度傳感器頻率范圍為0.1~2000 Hz,加速度范圍為±40 G,兩種傳感器都能滿足測量需求。
5849 7 2
無人機圈 ??? 2年前
FRED應用:激光二極管光源耦合到光纖的仿真 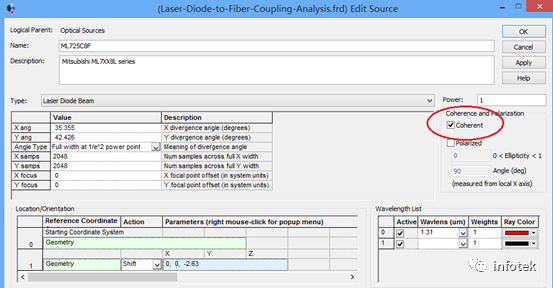
所有其它的表面是不加涂層的。 仿真 FRED使用如下的方程來計算光纖耦合效率(CE): 其中Einc是入射場分布,Efiber是光纖基模的場分布(由FRED根據光纖規格參數自動計算)。 一般來說,CE是一個復數,所以耦合功率實際上是: 因此,我們要想精確的計算光纖耦合,需要在光纖入口的后面放置一個分析面來保證該表面的反射系數能夠準確的納入考慮之中。
2398 1 1
追光ing ??? 1年前
激光雷達超遠距離測距技術 
發送模塊實現業務數據讀取、測距計數讀取、數據加擾、成幀、并串轉換、占空比脈沖調制(模擬激光調制)。接收模塊實現接收數據的位同步、幀同步檢測、測距脈沖計數、距離解算、恢復業務數據。算法實現模型中各功能模塊連接關系如下圖所示。
1077
威睛光學 ??? 2月前
激光二極管光源耦合到光纖 
所有其它的表面是不加涂層的。 仿真 FRED使用如下的方程來計算光纖耦合效率(CE): 其中Einc是入射場分布,Efiber是光纖基模的場分布(由FRED根據光纖規格參數自動計算)。
2367 2
追光ing ??? 3年前
Comsol熱流相變+動網格仿真激光熔覆 

有興趣的可以加我,交流模型。
141 2 1
琳泓comsol ??? 5年前
基于optisystem的光發送機的設計和仿真 
采用外調制器,讓調制信息加到光源的直流輸出上,可獲得更好的調制特性、更好的調制速率。目前常采用的外調制方法為晶體的電光、聲光及磁光效應。
2798
320科技工作室 ??? 4年前
一期一會 | 詳解光學機械設計及其典型仿真工作流程 
工程師以力、加速度和溫度變化的形式評估外部載荷,以了解每個組件可能移動或變形的程度,并確保結構不會永久變形或斷裂。此外,他們還會修改設計,以隔離灰塵、化學品、水分和光線等不必要的污染物。 結構設計的另一部分工作是熱管理。激光等光源通常會產生熱量,而傳感器通常具有非常特定的工作溫度范圍,這些組件都必須保持在允許的溫度范圍內,因此有時需要被動、主動和低溫冷卻。
2326
Ansys中國 ??? 1月前
探討如何構建端到端高置信度驗證體系? 
(2)激光雷達(LiDAR)模型偏差主要來自激光衰減、多徑反射和返回強度建模。激光在與不同材質表面交互時,其能量衰減、漫反射和鏡面反射特性各不相同。仿真若未能精確建模材質的反射率與激光波長的關系,將導致點云強度信息失真,影響基于強度的目標分類算法。同時,激光在復雜結構(如角落、潮濕路面)中的多徑效應會產生偽影點,干擾障礙物檢測。
2858
康謀keymotek ??? 5月前
康謀分享 | 基于多傳感器數據的自動駕駛仿真確定性驗證 
雷達數據 (Radar & LiDAR):毫米波雷達和激光雷達的點云(LAS v1.4)、目標列表及3D標注框。車輛自身狀態 (GPS, IMU, Vehicle):高精度的定位、姿態、加速度及車輛動力學信息。
2867
康謀keymotek ??? 10月前
有問必答 | 關于SYNOPSYS 中命令設計模塊問題匯總九 
多層模結構的激光熱模擬 Multilayer 光學膜結構模擬軟件 SimuLase 半導體設計分析軟件 RP Fiber Power 光纖激光器及光纖器件設計軟件 RP Resonator 激光諧振腔設計軟件 RP Coating 設計光學多層結構軟件 RP ProPulse 脈沖傳輸模擬 RP Q-switch
1932
墨光科技 ??? 4年前
基于optisystem的EDFA通信系統設計 
通過利用半導體激光器的多功能特性,可以完成放大和波長轉換。(6) 觀察儀客戶可以在任何器件使用觀察儀來打開端口數據監視器,并且存取結果。數據監視器可以保存處理過的信號信息,而沒有必要預先確定觀察儀的類型。因此,一個OSA或WDM分析儀可以加在相同的監視器上,一旦一個計算完成,就不需要再次運算。
2408
320科技工作室 ??? 3月前
使用相干光模擬馬赫澤德干涉儀 
系統說明 ? 光源— 氦氖激光器(波長632.8nm;相干長度>1m)? 元件— 分束器和合束器,消色差準直透鏡系統,位相延遲器,待測球面透鏡? 探測器— 干涉條紋? 建模/設計— 光線追跡:初始系統概覽— 幾何場追跡加(GFT+):? 計算干涉條紋。? 分析對齊誤差的影響。 2.
1910
追光ing ??? 3年前
FRED案例展示:單模光纖耦合與容差分析 
所有其它的表面是不加涂層的。③仿真FRED使用如下的方程來計算光纖耦合效率(CE):其中Einc是入射場分布,Efiber是光纖基模的場分布(由FRED根據光纖規格參數自動計算)。
2759
追光ing ??? 1年前
知語云:低慢小無人機管制反制監測 探測偵測方式方法? 
3.2激光探測激光探測系統主要由發射光源、接收器、處理器和顯示器構成。激光測距根據測量原理,可以在分為脈沖式和相位式。脈沖式激光測距是利用激光脈沖在系統和目標之間來回傳輸一次所使用的時間計算出目標的距離。相位式的激光測距是利用調制的連續光波在探測系統和目標之間來回一次所發生的相移計算出目標的距離。
4644 8 2
用戶_34138 ??? 2年前
【VirtualLab運用】使用相干光模擬馬赫澤德干涉儀 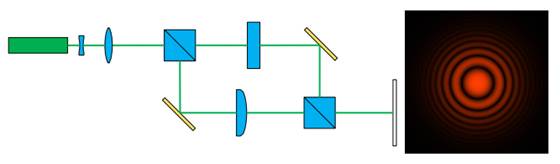
測量系統(MSY.0001 v1.1) 應用示例簡述 1.系統說明 ?光源—氦氖激光器(波長632.8nm;相干長度>1m)?元件—分束器和合束器,消色差準直透鏡系統,位相延遲器,待測球面透鏡?探測器—干涉條紋?建模/設計—光線追跡:初始系統概覽—幾何場追跡加(GFT+):?計算干涉條紋。
2479
追光ing ??? 1年前
客戶案例 | Ansys攜手Cognata,在Microsoft Azure上實現穩健的ADAS/AV傳感器測試 
車輛加塞與自動緊急制動Cognata的創成式AI傳輸技術由AMD Radeon PRO V710 GPU支持,通過高保真度虛擬傳感器增強了RGB攝像頭仿真平臺。該技術可以在仿真中準確捕獲和再現傳感器的真實行為。
2523
宇熠科技 ??? 1年前
VirtualLab運用:光學測量系統的分析與公差 
2.系統說明 3.建模/設計結果 4.總結 馬赫澤德干涉儀的干涉圖樣的計算 1.仿真 以光線追跡對干涉儀的仿真。 2.計算 采用幾何場追跡加引擎以計算干涉圖樣。
2611
追光ing ??? 1年前
汽車玻璃邊緣隱藏的秘密——小黑點 
為了更直觀、定性地看一下熱應力和熱變形的減弱效果,用AIFEM做了個熱固耦合仿真。將小黑點做了塊狀簡化,環境20度,一個計算是玻璃邊緣區域70度;另一個邊緣三段區域,分別70,50,30度過渡,計算后明顯看到有溫度過渡的情況,應力和變形小都會一些。理論加仿真,溫差導致的玻璃熱應力和熱變形你get了嗎?
2495
朦朦站起來 ??? 1年前
康謀分享 | 自動駕駛仿真進入“標準時代”:aiSim全面對接ASAM OpenX 
自車及他車的位置、姿態、速度、加速度等狀態b. 所在車道信息及邊界點分布c. 持續每步仿真中生成并記錄,支持全流程回溯 同時,aiSim 提供兩種查詢方式:a. GetAllOSIGT:獲取全部仿真過程中的 GT 數據(帶時間戳)b.
2421
康謀keymotek ??? 12月前
20條/頁 
跳至頁

技術鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP
