



工業移動機器人未來五大發展趨勢,你知道多少?
前言工業移動機器人未來五大發展趨勢移動機器人主要需要解決定位、規劃、控制等問題,目前重點的研究領域包括環境感知與建模、定位與導航、環境理解、多機器人協調等,未來移動機器人將朝著以下趨勢發展:1“自然導航+自主路徑規劃”成為主流移動機器人發展經歷了有軌方式(如磁帶牽引方式)、信標方式(如二維碼)、無信標方式(如
2243
機械學霸 ??? 3年前
ABB機器人編程基本知識匯總 附ABB機器人操作手冊中文版下載 
(4)函數Offs():MoveLp1,v100,…MoveLp2v100,…MoveLp3,v100,…MoveLp4,v100,…MoveLp1,v100,…·為了精確確定p1、p2、p3、p4點,可以使用函數Offs()。·Offs(p1,x,y,z)代表一個離p1點X軸偏差量為x,Y軸偏差量為y,Z軸量為z的點。
2630
耐思 ??? 4年前
全面分析特斯拉機器人“超算”芯片(超越GPGPU?) 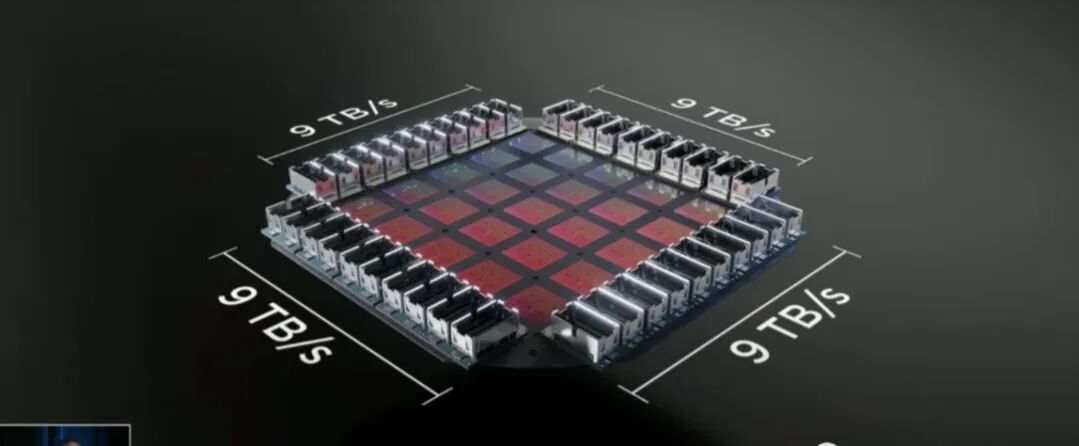
名為擎天柱的機器人搬運物品,給植物澆水,甚至自主的在工廠工作了一段時間。”我們的目標是盡快制造出有用的人形機器人”,特斯拉表明,他們的目標是讓機器人的價格低于 2 萬美元,或者比特斯拉的電動汽車便宜。特斯拉機器人之所以這么強,除了特斯拉本身在AI技術的積累外,更主要得益于特斯拉強勁的自研AI芯片。這顆AI芯片,不是傳統上的CPU,更不是GPU,是一種更適合復雜AI計算的形態。
2734 1
牛頓家的計算機 ??? 3年前
《基于 ABAQUS 的桁架機器人模態分析》 
其各方向的運動由交流伺服電機通過減速機驅動齒輪與固定于 X、Y 向橫梁上的齒條進行傳動。2 模態理論介紹 模態分析是動態特性分析的基礎和核心。它通 過模態變換矩陣把復雜結構中多自由度的振動一 個個簡化為單個的自由度振動。然后再利用線性疊 加,對復雜結構的振動模態進行分析[7]。
3088 2
CAEer吳皓 ??? 2年前
機器學習中的優化算法
</p><p>假設我們想要最小化函數 f(x)=x2使用 Gradient Descent。
2416 1
仿真資料吧 ??? 1年前
三自由度機械臂運動學分析+仿真 
求關節角 對式子兩邊連續乘以A1-A2的逆矩陣,可得 讓上述公式中第一行第三列對應相等,第二行第三列對應相等可得: 3機器人模型建立 所設計的機器人由多個連桿機構組成,其關節類型包括旋轉關節和移動關節兩種。利用Matlab中機器人仿真工具箱Robotics Tool中Link和SerialLink兩個函數可建立機器人模型[] 。
3987
余俊煒 ??? 2年前
2024年RecurDyn優秀案例競賽作品分享:核探測機器人底盤設計與越障性能仿真驗證 
3.2 翻越凸臺性能仿真分析 機器人在翻越凸臺時主要包括接觸凸臺、爬升凸臺、翻越凸臺三個步驟,其中爬升階段為機器人底盤主要受力階段,在爬升過程中機器人質心不斷發生變化,同時驅動扭矩也在不斷加大,若在機器人驅動扭矩滿足爬升受力的情況下履帶不與凸臺邊界發生打滑,則機器人便能順利越過凸臺。為了測出機器人所能翻越凸臺的高度極限值,在同一路面設置了多個不同高度的凸臺進行仿真。
2554
杭州擬創(RecurDyn原廠) ??? 1年前
終結“續航焦慮”:魯渝能源揭秘人形機器人無線充電的破局之道 
靈活的充電點位設計: 充電發射端可以巧妙地集成在休息站、墻角、座椅甚至地面上,接收端則可適配于人形機器人的足底、背部或特定部位。當機器人進入充電區域,無需精確對準,即可開始充電。2. 支持非靜態充電: 針對某些待機或低功耗移動狀態下的補電需求,魯渝能源可提供動態或準靜態無線充電方案,進一步拓展機器人的工作邊界。3.
2185
魯渝能源無線充電 ??? 6月前
基于深度學習的機器人目標識別和跟蹤 
近年來,在一大批優秀科研技術人員的努力下,取得了很多豐碩的成果。涌現出了一大批相關產業的科技公司,如大疆、科大訊飛等。2 機器人視覺國內外研究現狀機器視覺技術的產生最早是在歐美及日本等國家,最早的一批較為有名的機器視覺相關產業公司也在這些國家,如光源供應商日本 Moritex、鏡頭廠家美國 Navitar、德國 Schneider等。
2278
DSJ123 ??? 3年前
RISC-V架構的演變 
雖然Fugaku在2022年6月的Top500榜單中被基于x86的Frontier系統取代,但它仍然位居第2位,并表明ARM將成為x86的重要競爭對手,也許會讓RISC成為高性能機器的主導CPU架構。RISC CPU架構比CISC架構更易于實現,需要更小的硅面積,并降低功耗。與CISC架構相比,這可以增加CPU時鐘頻率和模具上更多的內核,從而提高性能。
4011 1 1
Treesa ??? 2年前
多工位自動化點焊技術的研究與應用 
圖2 工業機器人點焊分布圖 工業機器人主要由控制系統、機械手和手持操作編程器三部分組成,其配置的6 個轉動軸,通過控制系統對伺服電機精確控制,實現沿X、Y、Z 軸向以及分別圍繞X、Y、Z 軸向轉動的6 個自由度的空間運動。同時用于焊接的6 軸工業機器人精度較高,6 軸法蘭。中心點的重復定位精度可控制在±0.08mm 以內。
2812 1
FMMM ??? 4年前
為機器人和協作機器人定制傳感器組件 
</span> <span style="color: rgb(68, 68, 68);">無論是在工業場所(如工廠或礦山,或是清潔倉庫),還是在公共場所(如送貨服務),自主機器人的吸引力正在增長。同時,其他概念也出現了,并創造了更多的機會,如移動機器人、空中機器人和軟機器人等。
5290 5
HBK測試與測量 ??? 3年前
使用 TensorFlow 進行對象檢測
MobileNetV2:MobileNetV2 是一種針對移動和邊緣設備優化的輕量級神經網絡架構。它在效率和性能之間取得了平衡,使其成為實時應用程序的理想選擇。 640x640:這表示模型預期的輸入圖像大小。較大的輸入大小通常會產生更準確的結果,但需要更多的計算資源。這些模型的大小也比在較大圖像(如 1024x1024)上訓練的模型小。此外,推理時間更短。
2315 1
仿真資料吧 ??? 1年前
魯渝能源全功率無線充電為巡檢機器人筑牢能源底座 
拖纜故障歸零,維護人員減少2人/班,機器人可用率達99.5%。場景二:化工廠區輪式防爆巡檢機器人 某化工企業罐區,采用輪式防爆巡檢機器人檢測氣體泄漏。因環境存在易燃氣體,傳統充電無法部署。魯渝能源提供1200W防爆無線充電方案(Ex mb認證),充電塢部署于安全區邊緣,機器人每日多次短時補電。零火花充電通過安全審核,機器人無需人工干預,罐區巡檢頻次提升3倍。
266
魯渝能源無線充電 ??? 3天前
一款工作電壓為2.7V至15V、負載電流1.0A的雙H橋電機驅動芯片-SS8833T 
QFN3x3-16:3.0mmx3.0mmQFN4x4-16:4.0mmx4.0mm電機驅動IC - SS8833T的應用:POS打印機視頻安全攝像頭機器人技術工業自動化 電池驅動的玩具深圳率能半導體在電機驅動領域深耕多年,技術以及產品方面已經很完善,如果想了解更多電機驅動的技術資料,歡迎致電聯系:133 9280 5792(微信同號)
2781
如果我年少有為 ??? 11月前
未來機器人的發展趨勢
**工業領域的深化與升級**: - **智能化與柔性化**:工業機器人將更加智能化和柔性化,適應小批量、多品種的生產需求。 - **人形與移動機器人**:這些新型機器人將與傳統工業機器人協同工作,提高生產的靈活性和效率。2.
2554
探索者第2號前來報到 ??? 1年前
行業新應用:電機驅動將成為機器人的動力核心 
馬達驅動芯片 - SS8833T的特性:寬電源電壓范圍:2.7V至13V兩個內部全橋驅動器低靜態電流:1.1mA低睡眠電流: 1μA熱關機和欠壓鎖定保護過電流保護(OCP)過溫輸出報警低MOSFET導通電阻(HS:650mΩ;LS:350 mΩ)封裝:ETSSOP16:5.0mmx6.4mm,背面有一個裸露的散熱墊QFN3x3-16:
2258
如果我年少有為 ??? 2年前
3大場景、4款新品公開亮相:「低速智能駕駛」新賽道惹關注 
機器人通過4/5G通信,V2X等技術手段,實時監測整個環衛項目的運行態勢,遠程監控、自動駕駛環衛車輛的作業狀態,并在必要時進行遠程接管。面對多種功能、多種噸位的車型,還可通過硬件平臺化和軟件模塊化的靈活組合,來實現多車型快速適配能力。
2274
千尋位置行業應用 ??? 3年前
高級別智能駕駛業務系列:V2X車路協同系統 
V2X車路協同系統作為L4高級別智能駕駛業務自動駕駛系統的有力支撐,實現了對無人駕駛車輛運行區域內交通情況的實時感知以及V2X通信。
2291 1
經緯恒潤 ??? 3年前
【6/8更新】全球最大蜘蛛機器人,自重2噸,可以像玩游戲一樣遠程操控工作 
一名英國工程師制造出蜘蛛機器人Mantis,是世界上最大的六足機器人。Mantis高2.8米,重2噸,觸手可達方圓5米。Mantis擁有強勁的力量,可以輕松將一輛小汽車踢開。人在駕駛艙里可以操縱它的行動,相當威猛。不過,Mantis移動卻是出奇的慢,每小時只能走1公里,真的是在爬。
2316
技術鄰CAD學習 ??? 3年前
20條/頁 
 56
56 跳至頁

技術鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP
