



CAE黑話:自由度(DOF)/多點約束(MPC)/剛體位移 
3D結構中,一個節點通常有6個自由度:3個平動 (UX, UY, UZ) 和 3個轉動 (ROTX, ROTY, ROTZ)。約束 (Boundary Condition) 的本質就是限制某些節點的DOF。DOF過少導致欠約束,計算報“奇異”;DOF過多導致過約束,結果失真。
1451
技術鄰-大奎 ??? 2月前
abaqus在使用邊界位移條件后如何解決位移自由度和轉動自由度突變問題?
abaqus在使用邊界位移條件后如何解決位移自由度和轉動自由度突變問題?
2297 1
愛汪不愛喵 ??? 3年前
基于LS-DYNA的工字型梁和實體單元的連接(提供自由度不匹配的處理方法) 
背景描述: 眾所周知,梁單元有6個自由度,實體單元有3個自由度,采用共節點連接實體單元和梁單元只能傳遞位移但是不能傳遞彎矩,LS-dyna提供節點剛體的方法(*CONSTRAINED_NODAL_RIGID_BODY)定義兩個柔性體之間的連接(其實不限梁和實體,理論上所有單元類型都是可以的)案例介紹: 核心關鍵字:
4459 7 3
藍牙 ??? 4年前
怎么綁定模型邊界兩側同一高度節點的自由度?
采用束縛自由邊界,怎么綁定模型邊界兩側同一高度節點的自由度
2174 1
用戶_44293 ??? 2年前
HyperMesh+LS_DYNA_節點剛性體主節點自由度的釋放 

本期內容利用實例看一下節點剛性體(*CONSTRAINED_NODAL_RIGID_BODY)主節點(master)自由度被釋放以后的變形情況。
6 1
Sahariver ??? 4年前
報錯:1個節點具有同時指定速度/位移/加速度/基本運動等約束的自由度?
求大神給分析一下,這個錯誤怎么解決
2336 1 2
亦久亦舊_4410 ??? 3年前
淺析有限元分析中自由度的概念 
在建立有限元模型時,需要正確地確定和分配每個節點的自由度,以確保模型能夠準確地描述問題的行為。通過在模型中引入適當數量的自由度,可以更準確地捕捉結構的變形和響應情況,從而進行有效的分析和計算。2-D薄殼和1-D梁單元都支持6個自由度,但所有實體單元都只有3個平動自由度(無轉動自由度)。例如一個10節點四面體單元總共有10 x 3 = 30個自由度。
2694
CAE知識手札 ??? 2年前
【JY】基于Matlab的(單)多自由度動力學代碼分享 
寫在前文多自由度分析是現代工程和科學研究中不可或缺的一部分。它涉及到對復雜系統的動力學行為進行精確描述和預測。分享下多自由度的源代碼,僅供學習。
4292 12 2
建源之光 - 減隔震 ??? 2年前
hypermesh如何約束局部坐標系下的自由度 
面板analysis --system創建好局部坐標系,然后把需要添加約束的節點assign當前坐標系。坐標系的關聯方式有set reference和set displacement兩種,set reference是指定位置參考坐標系,節點坐標會轉變至參考坐標系下;set displacement是指定節點自由度坐標系,一般用于約束節點的自由度,節點坐標不變。
3692 4
略略略_7400 ??? 2年前
hypermesh-ansys聯合仿真之LINK180單元 
合理的約束方式如圖2,首先只約束四角節點的Z向自由度,這樣框架梁只能在xy平面內剛體平動和轉動,然后約束左側兩角節點的X方向自由度,這樣限制了之后框架只能沿Y方向平動,最后約束左上角節點的Y方向自由度,這樣就用最少的約束限制了所有的剛體運動又不限制梁的自有變形。
3661 1
刺殺泊松比 ??? 3年前
案例19 挖掘機臂裝配體的瞬態動力學分析 
兩個節點定義一個連接單元,兩個節點之間的相對運動由六個相對自由度定義。一個連接單元是基于施加在這些相對自由度上的約束類型而定義的。 要想約束被合適地施加,必須在連接單元節點處定義局部坐標系,在APDL中,約束通過拉格朗日乘子法施加。 連接能力提供了下列特點: 1. 停止和鎖定了連接副的自由自由度 2. 連接副中的剛度、阻尼和摩擦行為 3.
3339 8 1
龍飛宇 ??? 3年前
通過 RBE2 和 RBE3 施加邊界條件(約束和力),有什么不同?
“RBE3 單元通常用于連接部件、附加非結構集中質量、施加載荷和邊界條件,以及其他需要分布式連接的地方。與 RBE2 不同,且與其名稱相反,RBE3不表現為剛體。RBE3 在構成節點和自由度之間創建了一個柔性連接,其中中心節點的位移等于其他節點位移的加權平均值。當不需要/不希望使用連接元技術時,此工具可以用于快速直接創建和修改 RBE3s。”
3447
CAE知識手札 ??? 1年前
Zemax案例 | 基于Zemax相機多自由度主動對準技術研究 
現有技術可分為三類: 像差分析法:基于節點像差理論,建立誤差與波前像差的解析關系,需高精度波前測量,設備成本高昂[2]; 數據驅動法:通過深度學習、靈敏度矩陣建立數值映射[3],依賴大量樣本與復雜訓練,工程落地門檻高; 搜索優化法:構建評價函數引導優化,無需復雜建模,但遍歷搜索耗時極長,多自由度場景下效率暴跌。
978
摩爾芯創 ??? 14天前
基于粒子群優化算法的六自由度機械臂三維空間避障規劃 
[2]馬宇豪.六自由度機械臂避障軌跡規劃及控制算法研究[D].中國科學院大學[2024-06-08]. 圖1 六自由度機械臂三維空間避障規劃示意圖 基于粒子群優化算法的三維避障路徑規劃1.1 路徑規劃問題描述路徑規劃是指在已知環境信息的情況下,確定從起始點到目標點的最優路徑,并且該路徑不能與環境中的障礙物相交。
2409
320科技工作室 ??? 1年前
有限元分析需要注意的三大原則 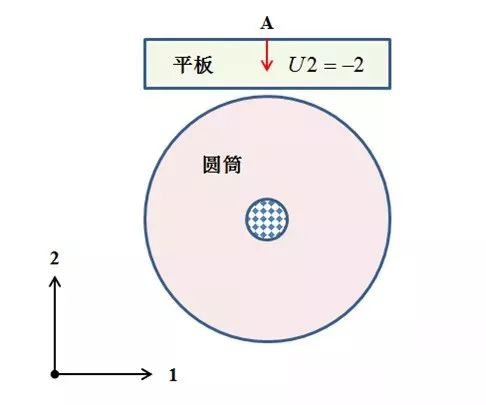
圖1 定義了位移邊界的模型圖2 后處理時看到平板發生了異常的位移對于三維模型,每個部件都有3個平動自由度和3個轉動自由度;對于二維模型,每個部件都有2個平動自由度和1個轉動自由度。在建立靜力分析模型時,必須在模型每個實體的所有平動和轉動自由度上定義足夠的邊界條件,以避免它們出現不確定的剛體位移,否則將導致分析往往無法收斂,即使能夠收斂,結果也往往是錯誤的。
2635 1
仿真客 ??? 3年前
*CONSTRAINED_NODAL_RIGID_BODY 
你可以想象成,所有從節點都被無形的、絕對剛性的桿連接到了主節點上。 自由度:這個由節點組成的剛體作為一個整體,擁有6個自由度:3個平動(X, Y, Z)和3個轉動(RX, RY, RZ)。 相對位置不變:被約束在一起的節點,它們彼此之間的初始相對距離和方位將永遠保持不變,無論這個剛體如何移動或旋轉。
3133 4
OnTheWay08 ??? 9月前
關于Abaqus UEL中RHS數組長度大于單元總自由度數的一些解釋
首先,有同行懷疑是因為用了四節點單元,所以多了四個,我開發的單元是12個節點的,依然多了四個維度,因此排除是單元內節點個數導致的。在Abaqus中,RHS向量的維數實際上包括了除了單元的位移自由度外的其他項,這些項用于處理多種情況,例如: 體積力和表面力的計算:RHS向量可能包括用于計算體積力和表面力的額外自由度。這些自由度用于存儲單元內的體積力和表面力的貢獻。
2488 4 1
博聞 ??? 2年前
Abaqus應用之常見問題處理 (三) 
在建立靜力分析模型時,需為模型的每個實體定義足夠的平動和轉動自由度上的邊界條件,以避免不確定的剛體位移。7) 利用對稱性建模:建模時應盡量利用對稱性,僅建模1/2、1/4或1/8的部分,以避免不確定的剛體位移,使模型更加穩固,并減少收斂難度、縮小模型規模、縮短計算時間。
4374 8
Abaqus_JUN ??? 1年前
【HyperWorks優化實例向導】之自由形狀優化 
Altair OptiStruct? 自由形狀優化算法:classic 和 vertex morphingAltair OptiStruct? 自由形狀優化算法分 classic 和 vertex morphing 兩類,vertex morphing 方法自由度更大,但是計算量也會隨之大幅度增加,而且 vertex morphing 方法目前還是 beta 版本,使用時需謹慎。
2484 4
清風徐來asd ??? 2年前
abaqus UEL 自由度選取?
我是研究非飽和土的,在編寫非飽和土UEL時,程序的自由度是位移、孔隙水壓和孔隙氣壓,孔隙水壓和孔隙氣壓都是流量自由度,編程序的時候借用哪兩個自由度來表示他們呢?如果用準靜態方程的話,結合上個問題,用哪個分析步呢?
2760 4 3
若木_6186 ??? 4年前
20條/頁 
 85
85 跳至頁

技術鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP
