



ABAQUS橡膠磨損:幫助文檔輪胎磨損例子 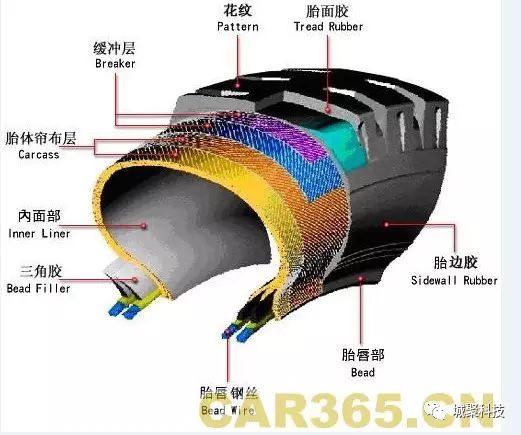
這樣的帶狀物包含輪胎與路面接觸的所有面。我們認(rèn)為發(fā)生在帶狀物上的磨損是均勻的;因此我們用下式表達(dá)整個帶狀物的磨損率, 其中t是時間,x是當(dāng)前配置位置。因?yàn)槲覀兪褂脷W拉穩(wěn)態(tài)傳輸處理,現(xiàn)在表達(dá)式可以表示為只依賴于時間的方程, 其中S是沿著流線的位置,T(s)是帶狀物在S位置的寬度。
4550 6 1
想飛更高 ??? 2年前
基于ADAMS的麥弗遜前懸架動力學(xué)仿真 
圖7 前束角隨車輪跳動的變化曲線通常希望輪距的變化要小些,以減少輪胎的磨損。從圖中可以看出,車輪向上跳動時輪距的變化更小一些,這樣可以減小載荷增加時輪胎的磨損,轉(zhuǎn)向斷開點(diǎn)向外移30mm后輪距變化對應(yīng)的值基本不變。
4232 2 1
320科技工作室 ??? 1年前
【技術(shù)貼】使用VSM?實(shí)現(xiàn)車輛操穩(wěn)的精準(zhǔn)控制 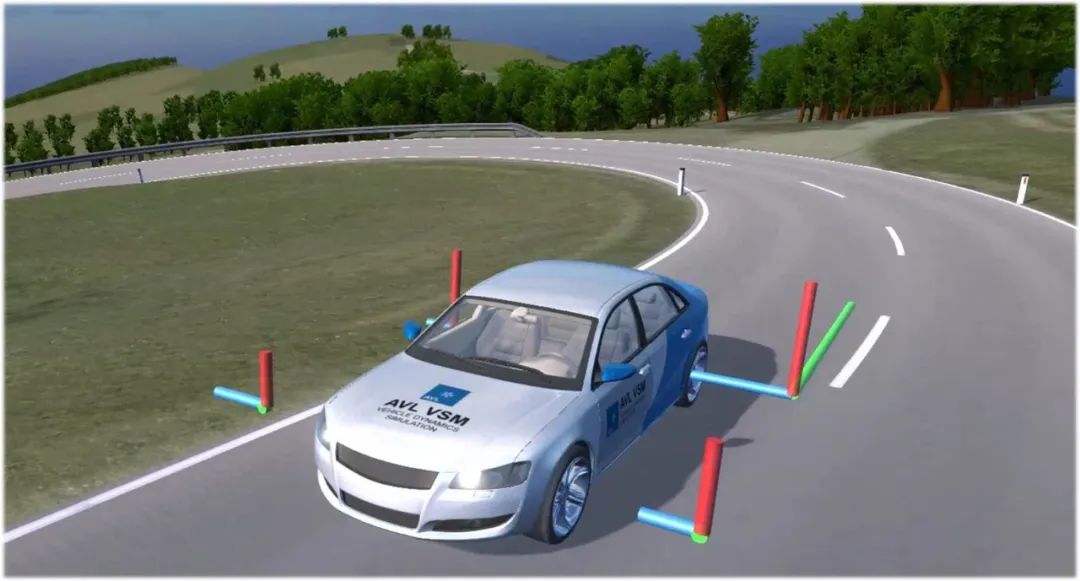
在車輛過彎行駛過程中,通過電機(jī)驅(qū)動控制改變內(nèi)外側(cè)驅(qū)動力,產(chǎn)生橫擺力偶矩,進(jìn)一步提高汽車的操縱穩(wěn)定性,這種在動態(tài)行駛中調(diào)節(jié)單個車輪力的控制功能通常稱為扭矩矢量(Torque Vectoring)控制,采用該技術(shù)在保證車輛高速轉(zhuǎn)彎行駛的安全性的同時,可以減少傳統(tǒng)通過制動力參與調(diào)節(jié)車輛穩(wěn)定性而帶來的能量損失及制動系統(tǒng)的磨損。
10051 2
AVL先進(jìn)模擬技術(shù) ??? 3年前
張工聊測量 | 如何對橋梁結(jié)構(gòu)進(jìn)行監(jiān)控和測試 
測試是在ERDC路面測試設(shè)施(圖 2)中進(jìn)行的,這是一個大型的飛機(jī)庫狀結(jié)構(gòu),允許在實(shí)際條件下建造多個全深度路面段和綜合評估路面性能。 圖2 ERDC路面測試設(shè)施長375英尺(約114米),寬145英尺(約44米),其規(guī)模足以確保同時施工、交通測試并進(jìn)行多個測試段分析。
4100 4 2
HBK測試與測量 ??? 3年前
如何給汽車零部件進(jìn)行疲勞耐久測試? 
輪胎耐久測試: 高速耐久:在轉(zhuǎn)鼓上以額定速度(如 200km/h)連續(xù)行駛數(shù)百小時,檢測胎面磨損與結(jié)構(gòu)熱疲勞。 屈撓疲勞:通過凹凸路面模擬,測試胎側(cè)在反復(fù)彎曲下的龜裂壽命(如 ETRTO 標(biāo)準(zhǔn)要求循環(huán)至花紋深度磨損 20%)。
3652 2
德基西瓜 ??? 11月前
自動駕駛為什么總出事?機(jī)器不應(yīng)該比人更可靠嗎?
我們都知道,雨天路面打滑對車輛安全行駛有很大的影響。那么我們首先可以通過氣象數(shù)據(jù)得到某一個區(qū)域晴天和下雨的概率,然后繼續(xù)得到路面濕滑的概率。當(dāng)然,晴天也有可能有灑水車,造成路面濕滑。在這個情況下,我們要做控制方面的一些測試,比如不同的廠家有不同的控制模塊,甚至同一個廠家在應(yīng)對不同的情況也有不同的控制算法。
2136 2
電子工程世界EEWorld ??? 3年前
3DGS技術(shù)詳解(一):3DGS如何融合動態(tài)天氣與光照等環(huán)境因素? 
重建出的場景保留了真實(shí)世界的所有細(xì)節(jié),如路面的磨損紋理、建筑物的風(fēng)化痕跡、植被的自然分布等。這種“照片級”的還原度讓仿真數(shù)據(jù)與真實(shí)數(shù)據(jù)在視覺統(tǒng)計(jì)特征上高度一致,大幅縮小sim-to-real gap。更重要的是極具可擴(kuò)展性,當(dāng)需要新場景時,只需派出采集車跑一趟,無需等待建模團(tuán)隊(duì)排期。這種"采集即建模"的模式讓場景庫的增長速度與算法迭代需求相匹配。
2210
康謀keymotek ??? 3月前
智能座艙測試:慧通測控車載屏幕測試常用的專業(yè)設(shè)備有哪些? 
萬能手指磨耗試驗(yàn)機(jī)專為模擬這類場景設(shè)計(jì),通過替換不同測試端頭,可實(shí)現(xiàn)手指磨耗、指甲劃痕、牙齒磨損、工業(yè)劃痕等多種磨損測試;同時能精準(zhǔn)模擬人體汗液、潤手霜、防曬霜、汽車清潔劑、牙膏等液態(tài)介質(zhì)的侵蝕環(huán)境,還原屏幕在實(shí)際使用中的接觸場景。
2336
德基西瓜 ??? 5月前
隱藏式門把手:在科技感與安全感之間,機(jī)械物理測試如何破局? 
耐久性測試: 在實(shí)驗(yàn)室臺架上,機(jī)械臂會以不同力度、不同角度對門把手進(jìn)行數(shù)萬次甚至數(shù)十萬次的循環(huán)“推、拉、按”操作,模擬整個生命周期的使用磨損。 強(qiáng)度測試: 測試門把手在受到意外側(cè)向撞擊、人為惡意掰扯時的承受極限,確保其不會輕易斷裂。
2242
德基西瓜 ??? 7月前
懸架技術(shù)介紹上篇-傳統(tǒng)被動懸架 
車輪傾角角度的不同會直接影響到輪胎的磨損,同時,多連桿懸掛結(jié)構(gòu)能通過前后置定位臂和上下控制臂有效控制車輪的外傾角。
4665 1
EDC電驅(qū)未來 ??? 2年前
整車測試:環(huán)境機(jī)械可靠性測試 
測試方法: 強(qiáng)化路面測試:在專業(yè)試驗(yàn)場(如比利時路、搓板路、卵石路)連續(xù)行駛數(shù)千公里,模擬極端路況對車輛的損耗,檢查懸架系統(tǒng)(彈簧、減震器)、轉(zhuǎn)向系統(tǒng)、車身焊點(diǎn)是否出現(xiàn)疲勞損傷。 長里程公路測試:在高速公路、城市道路等綜合路況下行駛數(shù)萬公里,監(jiān)測發(fā)動機(jī)、變速箱等機(jī)械部件的磨損情況,記錄故障發(fā)生頻率。
2429
德基西瓜 ??? 11月前
叉車用轉(zhuǎn)向節(jié)生產(chǎn)工藝分析 
⑴擠壓口位置容易磨損,磨損后導(dǎo)致金屬流動變差,桿部充不滿。因此需在模具使用過程中監(jiān)控,模具的冷卻與潤滑用單點(diǎn)教育表進(jìn)行培訓(xùn)教育,同時擠壓口磨損后要及時修復(fù)。⑵上模未做頂桿,模具磨損后產(chǎn)品容易卡上模,造成產(chǎn)品溫度低。改善對策為上下模都需要做頂出機(jī)構(gòu)。⑶下模冷卻時噴灑的石墨乳由于頂出間隙小無法流出導(dǎo)致頂桿卡死,后續(xù)改善需增加石墨乳流出孔。
2275 1
FMMM ??? 4年前
智能底盤技術(shù)(5) | 底盤電子穩(wěn)定性控制系統(tǒng)的進(jìn)化之路之ABS 
,縮短制動距離,尤其是在冰雪路面上可縮短10%-15%; 制動過程中,車輪仍然可以滾動,保持了前輪的可操縱性,防止后輪的側(cè)滑,維持了行車方向的穩(wěn)定性; 由于制動防抱,車輪不會抱死拖滑,減少了輪胎的磨損,可以提高輪胎的使用壽命,減少空氣中的污染。
2428
駕駛哥 ??? 3年前
一定要注意輪胎上這4個字,關(guān)鍵時刻能救命!很多人還不知道… 
這種情況下的輪胎已經(jīng)磨損的很嚴(yán)重了,為了生命安全,要及時更換。 3、平時開車少,但輪胎已使用了3至5年。 這時候輪胎在不考慮磨損的情況下,也要考慮橡膠老化,嚴(yán)重影響使用。
1878 1
機(jī)械發(fā)明愛好者 ??? 4年前
EDEM 汽車底盤石擊分析網(wǎng)絡(luò)研討會 

培訓(xùn)大綱:
1.汽車底盤及整車建模;2.石子行駛路面建模;3.耦合分析流程;4.石擊和底盤磨損分析。
114
ALTAIR ??? 1年前
ADAMS汽車差速器模擬仿真 
實(shí)際上即使車輛直行時,也會因?yàn)樘骸⑤喬?em>磨損程度、裝配精度等問題而滾動半徑不相同。而打滑會造成輪胎的異常磨損、能量消耗過大、轉(zhuǎn)向失效等為題,因此需要增加差速器保證兩側(cè)車輪的純滾動。 本文主要通過ADAMS/View建立差速器模型,并且將其應(yīng)用在簡化的小車上進(jìn)行仿真分析。
5350 4 1
擺渡人張 ??? 2年前
【汽車知識】汽車懸掛系統(tǒng)竟然有這么多種,都是經(jīng)典的機(jī)構(gòu)設(shè)計(jì) 
雙叉臂式懸掛通常采用上下不等長叉臂(上短下長),讓車輪在上下運(yùn)動時能自動改變外傾角并且減小輪距變化減小輪胎磨損,并且能自適應(yīng)路面,輪胎接地面積大,貼地性好。由于雙叉臂式懸掛比麥佛遜式懸掛雙叉臂多了一個上搖臂,需要占用較大的空間,而且定位參數(shù)較難確定,因此小型轎車的前橋出于空間和成本考慮較少采用此種懸掛。
2360 1
機(jī)械工程師 ??? 4年前
連奪3命!小小手動叉車,竟然成“殺人”機(jī)器? 
”10.8“傾倒事故深圳市瑞智電力股份有限公司“11·14”事故英諾激光科技有限公司光明分公司“11·16”事故 事故原因分析 三起事故均存在不同程度違章作業(yè), ”10.8“事故,作業(yè)人員未將叉車放在一安全位置,就拉出,且作業(yè)路面也是坑坑洼洼,直接導(dǎo)致叉車傾倒,造成這個悲劇的發(fā)生。
2000
數(shù)控編程網(wǎng) ??? 4年前
新型陶瓷材料的發(fā)展與應(yīng)用地 
綜合利用敏感陶瓷正壓電效應(yīng)、逆壓電效應(yīng)和電致伸縮效應(yīng)研制成功的智能減振器,由于采用高靈敏度陶瓷元件,從而具有識別路面且能做自我調(diào)節(jié)的功能,可以將轎車因粗糙路面引起的振動降到最低限度。03航空航天領(lǐng)域航天航空領(lǐng)域用材料大多在超高溫、強(qiáng)輻照等極端苛刻環(huán)境中使用,要求材料具有高比強(qiáng)、高比模、耐高溫、抗燒蝕等特性。
3270 1
材料科學(xué)與工程技術(shù) ??? 3年前
虛實(shí)融合,智創(chuàng)未來:RecurDyn與Unity的協(xié)同仿真 
RecurDyn負(fù)責(zé)精確模擬車輛在不同路況(如顛簸路面、冰雪路面)、不同駕駛工況(如正常行駛、緊急制動、緊急避讓)懸架及輪胎部分的動力學(xué)響應(yīng),包括懸架的跳動、車身的姿態(tài)變化和輪胎的抓地力等。而Unity則負(fù)責(zé)將這些復(fù)雜的物理行為渲染出來,并可以模擬其他交通參與者(如車輛、行人、自行車)的行為。
2655
杭州擬創(chuàng)(RecurDyn原廠) ??? 9月前
20條/頁 
跳至頁

技術(shù)鄰APP
工程師必備
工程師必備
- 項(xiàng)目客服
- 培訓(xùn)客服
- 平臺客服
TOP
