



齒輪箱全方位仿真:RecurDyn 與 Particleworks 的聯合應用 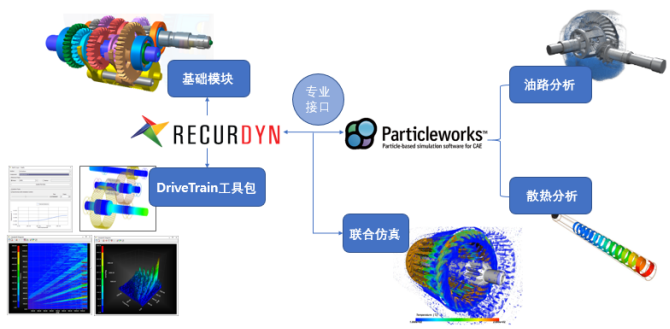
2.使用DriveTrain的方法:1) 在導入CAD模型后,根據需求可使用DriveTrain中的Bearing、Shaft、Gear等模塊快速完成齒輪箱中的各部件建模。2) 對于軸建模可使用Shaft功能,確定起點和方向,輸入長度半徑等幾何信息,定義FDR,即可建立柔性軸或行星軸。在完成仿真后可直接查看軸的力學分析結果(應力應變等)。
3513 3
杭州擬創(RecurDyn原廠) ??? 1年前
Fluent仿真后處理實戰技巧(一) 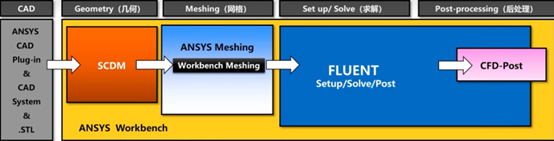
圖1 仿真后處理,是將ANSYS Fluent計算完成后的結果進行展示和交流的有效手段。ANSYS Workbench平臺下的CFD-Post模塊功能全面,操作性強,非常適合用于Fluent計算結果的后處理。CFD-Post后處理的基本流程是:確定位置à通過變量/表達式提取數據à在給定位置生成數據。 因此對于后處理而言,“位置”的概念是非常重要的。
7118 4 1
星空caer ??? 2年前
基于RecurDyn的多工況下的尼龍蝸輪疲勞性能研究 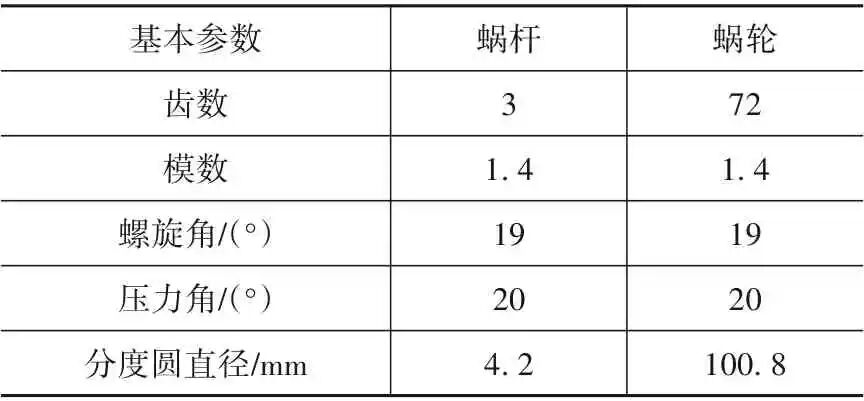
在RecurDyn 的Durability 模塊中,直接導入動力學仿真結果,根據材料參數表(表4)和修正后的S-N 曲線,設置尼龍蝸輪的材料疲勞屬性,并選擇基于應力的疲勞壽命計算準則和多軸疲勞算法。選擇整個尼龍蝸輪作為疲勞計算的對象,并將整個動力學仿真分析時間作為疲勞分析的單個加載周期。通過RecurDyn 的Durability 模塊計算的疲勞壽命結果如圖8所示。
3019 1 1
仿真客 ??? 3年前
FRED應用:數字化極坐標數據取樣 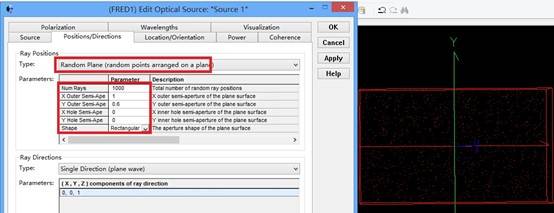
在光源對話框的位置/方向標簽上選擇“隨機平面(平面上排列著隨機點)”,并根據上述的規格表設置X和Y的外半孔徑值。開始后,設置光線數目為1000,孔徑的形狀為矩形。步驟2:指定光線的方向類型光線的空間位置指定好了后,我們需要輸入光線的方向信息。
1048
信光嗎 ??? 1月前
數字化極坐標數據取樣 
一旦我們在極坐標圖中選擇好了這些點,點擊“導出數據”,就會將數字化的點送回到光線方向對話框中。 步驟4:驗證強度分布 既然數據已經從極坐標圖中導出,那就有必要驗證坐標系統的設置是否正確。在本例中,極軸沿著Z方向,方位角軸沿著X方向。當只有1個方位角數據輸入進來時,FRED將假定分布是旋轉對稱的。當輸入多個方位角數據是,FRED會將這些數據點進行線性插值。
2267 3
追光ing ??? 3年前
Ansys Workbench后處理中,利用APDL命令提取繞圓柱坐標系的扭矩角度 
并且為了方便校核準確性還提供了沿圓柱坐標系Y軸的變形量。并且,除了界面顯示的結果外,還會在WB的結果文件夾中,顯示named Selection區域所有節點的編號/距離選定坐標系的距離/沿坐標系Y軸的變形量/換算后的角度值等信息,以便進行其它數據處理。
2699 3 1
cae_lizh ??? 6月前
FRED應用:數字化極坐標數據取樣 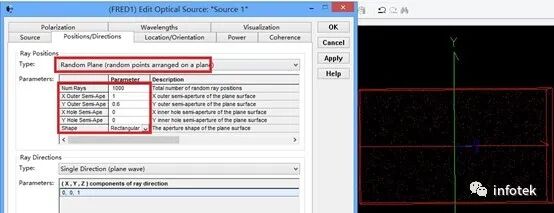
在光源對話框的位置/方向標簽上選擇“隨機平面(平面上排列著隨機點)”,并根據上述的規格表設置X和Y的外半孔徑值。開始后,設置光線數目為1000,孔徑的形狀為矩形。 步驟2:指定光線的方向類型光線的空間位置指定好了后,我們需要輸入光線的方向信息。
2098
追光ing ??? 11月前
ABAQUS喵星人教你學會鋼筋混凝土殼單元的前處理與后處理 
在鋼筋層中輸入各層鋼筋的參數:層名:非常重要,不能小看,這是由于在后處理中需要通過層名來找到配筋層,以顯示其場變量材料:寫入鋼筋材料單根面積:單根鋼筋的面積間距:等距配筋中鋼筋的間距方向角:與上一節給定坐標系1軸方向的夾角,可用于區分不同方向配筋的縱橫向位置:該層鋼筋中心偏離殼單元中心層的距離。
2901 17 6
會CAE的喵星人 ??? 6月前
質量管理 | 功能尺寸和局部坐標系在eMMA軟件輔助車身裝配中的應用 
隨后,在正確的局部坐標系下,創建各類功能尺寸(如間隙面差、對稱點等),并設定比單點尺寸更嚴格的功能公差。02分析階段:測量數據上傳后,系統自動將實測數據與理論CAD模型在定義的局部坐標系下進行對齊。在eMMA Assembler中,可將多個零件以其自身的局部坐標系為基準,進行“虛擬匹配”。
2160
海克斯康設計與仿真 ??? 6月前
Ansys Zemax | 如何使用坐標返回功能 
示例文件中CoordinateReturn_Start的數據和布局圖如下圖所示,當前S3表面的坐標軸方向與物空間坐標軸方向相同,由于系統坐標在S1表面后(在本例中該表面沿X軸方向旋轉了20°)沿偏轉后的Z軸傳播了一段距離,因此我們需要在S2和S3表面之間引入一定量的Y方向偏移,使S3表面的坐標軸及表面頂點的XY坐標與物空間坐標軸一致。
2424 3
宇熠科技 ??? 3年前
關于三坐標測量機的常見問題及回答 
- 編程測量:根據工件的測量要求,通過測量機的操作軟件進行編程,確定測量點的位置、測量路徑等。編程可以采用手動編程或自動編程(如使用CAD模型進行離線編程)的方式。在編程完成后,啟動測量程序進行測量。 - 數據處理和報告:測量完成后,對測量數據進行處理,如計算尺寸偏差、形狀誤差等。然后生成測量報告,報告內容應包括測量結果、偏差分析、合格與否等信息。 2.
2587
深圳市中圖儀器股份有限公司 ??? 1年前
基于ADAMS的點按手法運動仿真 
用戶可以利用各種模塊方便地建立機械系統虛擬樣機,并通過強大的后處理模塊對參數的測量結果進行處理與分析。ADAMS采用世界上廣泛流行的多剛體系統動力學理論中的拉格朗日方程方法,選取系統內每個剛體質心在慣性參考系中的3個直角坐標和確定剛性方位的3個歐拉角作為笛卡爾廣義坐標,用帶乘子的拉格朗日方程處理具有多余坐標的完整約束系統或非完整約束系統,導出以笛卡爾廣義坐標為變量的運動學方程。
3007 2
擺渡人張 ??? 2年前
Ansys Zemax|為離軸反射鏡中增加相位表面 
圖 1:離軸拋物面設計示例的布局圖,后焦距為 -187.5 mm。 圖 2:用于 OAP 設計的鏡頭數據編輯器。
1899
宇熠科技 ??? 6月前
Recurdyn實用操作 
9.后處理各名稱含義 ————————————————版權聲明:本文為CSDN博主「hand_up」的原創文章,遵循CC 4.0 BY-SA版權協議,轉載請附上原文出處鏈接及本聲明。
4018 2 2
CAE仿真學習菌 ??? 2年前
Ansys Zemax | 如何圍繞空間中的任何點旋轉任何元素 
圖 11: 用于生成系統中每個表面的全局坐標位置列表的設置。每個元素的全局頂點將在輸出窗口中列出,如圖12所示。我們可以檢查數據,確認透鏡2上的5度傾斜沒有改變其余表面的位置或傾斜。特別地,我們可以看到曲面10到15不包含任何傾斜,因為旋轉矩陣只包含1和0。我們還可以看到透鏡3和像平面的整體 Y 坐標為0,這表明這些表面正確地位于系統軸上。
2634
宇熠科技 ??? 8月前
坐標轉換與參數計算介紹 
隨著計算機技術及移動互聯網的飛速發展,數據的處理和信息的傳遞突破了時間和地域的限制,作為信息時代的產物和寵兒,全球定位系統得到了空前的發展和應用,為空間定位提供了準確、可靠的數據,而這些準確、可靠的數據更需要算法的支持。在手機軟件測量大師的開發過程中,我有幸涉獵到該領域的算法知識。
2676 2
繪夢流光 ??? 3年前
2000坐標系與現行坐標系的關系及采用2000坐標系之后的一些變化 
、轉換誤差與數據后處理等因素,其橢球體變換過程可忽略。
2722
巖土聯盟 ??? 4年前
機床精度突然降低?4大診斷原則,5大診斷方法 
然后在手動方式下,將機床點動到其他任意位置,再次在手動輸入數據方式操作下運行剛才的程序段,待機床停止后,發現此時機床坐標數值顯示為“-1024.891”,同上一次執行后的數值比較相差了0.352mm.按照同樣的方法,將X軸點動移動到不同的位置,反復執行該程序段,而顯示器上顯示的數值都有所不同(不穩定)。
2230
機械學霸 ??? 4年前
三坐標測量機(CMM)的高效應用指南 
三坐標測量機(Coordinate Measuring Machine, CMM)憑借其空間坐標采集能力和強大的數據處理軟件,成為解決復雜孔徑測量難題的核心裝備。 當孔徑在毫米至厘米量級時,三坐標測量機的接觸式探針可提供±0.001mm的重復測量精度,其多軸聯動系統能自動擬合孔壁三維輪廓。
2869
深圳市中圖儀器股份有限公司 ??? 9月前
三坐標測量如何實現微米級精度?核心算法全解析 
例如,位置度計算需基于DRF,找到被測要素實際位置相對其理論位置的最大允許變動區域。 (2)可視化與報告:生成包含公差帶圖示、偏差色譜圖、數據表格的詳細報告。直觀展示工件何處超差、超差量值,為工藝改進提供精準依據。 三坐標測量機的微米級精度,是數學、物理、計算機科學與精密機械深度融合的結晶。
2486
深圳市中圖儀器股份有限公司 ??? 9月前
20條/頁 
 46
46 跳至頁

技術鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP
