



Isight--響應(yīng)面分析+單目標(biāo)或多目標(biāo)優(yōu)化--操作流程 

本節(jié)課主要講解一下如何用Isight讀取已經(jīng)處理好的數(shù)據(jù)進(jìn)行響應(yīng)面近似模型建立以及用NLPQL 算法為例進(jìn)行講解單目標(biāo)優(yōu)化問題。多目標(biāo)優(yōu)化問題類似處理。
143 4
東邪不邪 ??? 4年前
Isight近似模型及多目標(biāo)優(yōu)化 
Isight對(duì)四因素三水平數(shù)據(jù)建立近似模型,完成誤差分析并改善精度;而后利用所建立的近似模型進(jìn)行多目標(biāo)優(yōu)化,并介紹多目標(biāo)優(yōu)化相關(guān)知識(shí)點(diǎn)。
1145 1 30
夢(mèng)溪 ??? 7年前
Isight+Abaqus(工字梁多因素多目標(biāo)優(yōu)化仿真) 
Isight聯(lián)合Abaqus進(jìn)行工字梁的試驗(yàn)設(shè)計(jì)優(yōu)化仿真,以工字梁腹板厚度、腹板高度、緣條厚度、緣條寬度為試驗(yàn)變量,以拉丁超立方試驗(yàn)生成各變量組合,以工字梁重量、最大應(yīng)力為優(yōu)化目標(biāo)進(jìn)行優(yōu)化仿真。
470 8
qiruiwang ??? 7年前
Isight多學(xué)科參數(shù)優(yōu)化軟件模塊構(gòu)成 附isight參數(shù)優(yōu)化理論和實(shí)例詳解下載
優(yōu)化算法庫(Optimization)數(shù)值優(yōu)化、全局優(yōu)化、多目標(biāo)優(yōu)化、專家智能優(yōu)化算法,是工程師開展設(shè)計(jì)優(yōu)化工作的利器。試驗(yàn)設(shè)計(jì)算法庫(DOE, Design OfExperiments)通過系統(tǒng)而有效的方法分析設(shè)計(jì)空間、篩選關(guān)鍵設(shè)計(jì)參數(shù)(減少問題規(guī)模)、評(píng)估設(shè)計(jì)變量影響以及辨別關(guān)鍵設(shè)計(jì)變量的交互影響關(guān)系。
2833
衛(wèi)士 ??? 4年前
基于Isight多學(xué)科優(yōu)化及輕量化優(yōu)化 
本文以Isight環(huán)境介紹整車多學(xué)科優(yōu)化及輕量化優(yōu)化。針對(duì)剛度、NVH等線性工況,首先進(jìn)行靈敏度分析進(jìn)行變量篩選。針對(duì)碰撞等分線性工況,根據(jù)經(jīng)驗(yàn)篩選出設(shè)計(jì)變量。然后分別針對(duì)不同的工況進(jìn)行DOE分析采樣,用于構(gòu)建元模型,包括質(zhì)量元模型。然后在基于元模型進(jìn)行組合優(yōu)化,首先應(yīng)用全局優(yōu)化算法定位目標(biāo)極值在設(shè)計(jì)空間中所處的區(qū)域,在應(yīng)用梯度優(yōu)化算法對(duì)該區(qū)域進(jìn)行精確尋優(yōu),最終獲得最優(yōu)設(shè)計(jì)解。
3952 20 9
仿真客 ??? 3年前
Isight集成ADAMS/CAR進(jìn)行多工況聯(lián)合參數(shù)優(yōu)化實(shí)例 
借此幾乎,將“Isight集成ADAMS/CAR進(jìn)行多工況聯(lián)合參數(shù)DOE或opti”以實(shí)例的形式呈現(xiàn)。希望對(duì)有需要的朋友,有所幫助。1、 選取DOE參數(shù)試驗(yàn)的Objective選取參數(shù)過程,需要跟工程實(shí)際結(jié)合。這里僅以最大轉(zhuǎn)向角、最大前束角作為Objective。
2325 1
歡樂多??π ??? 9月前
多特征融合的多目標(biāo)跟蹤網(wǎng)絡(luò) 
以上基于聚類的無監(jiān)督方法可以獲得一定的場景泛化能力來應(yīng)對(duì)光線變化,但僅使用二維圖像對(duì)復(fù)雜場景分割的精度依舊有限且難以進(jìn)行場景感知,亦存在較多局限性。 針對(duì)室內(nèi)場景目標(biāo)多種多樣,各目標(biāo)之間差異較大,比如有靠椅、有凳子等,傳統(tǒng)圖像算法難以完整的分割出目標(biāo),且難以獲得類別標(biāo)簽等更多的信息。
2538
駕駛哥 ??? 4年前
多軟件與isight聯(lián)合仿真 
筆者自2000年開始接觸并采用Isight軟件開展多學(xué)科設(shè)計(jì)優(yōu)化工作,經(jīng)過12年的發(fā)展,我們欣喜地看到優(yōu)化技術(shù)已經(jīng)深深扎根到眾多行業(yè),幫助越來越多的中國企業(yè)提高產(chǎn)品性能和品質(zhì)、降低成本和能耗,取得了可觀的經(jīng)濟(jì)效益和社會(huì)效益。
37
力學(xué)AI有限元 ??? 1年前
深度學(xué)習(xí)|基于MobileNet的多目標(biāo)跟蹤深度學(xué)習(xí)算法 
關(guān)鍵詞深度學(xué)習(xí) 多目標(biāo)跟蹤 目標(biāo)檢測(cè) YOLOv3 deep-SORT MobileNet0 引言多目標(biāo)跟蹤是計(jì)算機(jī)視覺領(lǐng)域的研究熱點(diǎn), 可應(yīng)用于交通監(jiān)測(cè)、安防等多個(gè)領(lǐng)域, 具有一定的應(yīng)用價(jià)值和挑戰(zhàn)性[1]. 檢測(cè)方式可以分為檢測(cè)跟蹤和無檢測(cè)跟蹤兩類, 前者需要檢測(cè)目標(biāo)后再進(jìn)行跟蹤; 后者需要在第1幀手動(dòng)初始化目標(biāo), 然后進(jìn)行跟蹤.
2443 1
龍騰AI技術(shù) ??? 3年前
基于深度學(xué)習(xí)的多目標(biāo)跟蹤算法原理 
將神經(jīng)網(wǎng)絡(luò)學(xué)習(xí)到的目標(biāo)的表觀特征引入到多目標(biāo)跟蹤算法中,是提升多目標(biāo)跟蹤算法效果的最簡單直接的辦法。其具體的操作方法有以下幾種:利用在圖像識(shí)別或行人重識(shí)別任務(wù)訓(xùn)練得到的特征提取網(wǎng)絡(luò),直接替換現(xiàn)有的多目標(biāo)跟蹤算法框架中的表觀特征提取模塊;采用深度神經(jīng)網(wǎng)絡(luò)學(xué)習(xí)光流運(yùn)動(dòng)特征,將光流網(wǎng)絡(luò)引入到算法中計(jì)算目標(biāo)之間的運(yùn)動(dòng)相關(guān)性等。而通過深度學(xué)習(xí)提升多目標(biāo)跟蹤算法更加直接的方法是學(xué)習(xí)檢測(cè)之間的特征相似性。
3206
駕駛哥 ??? 4年前
214基于matlab的交互多模算法(IMM)機(jī)動(dòng)目標(biāo)跟蹤算法 
基于matlab的交互多模算法(IMM)機(jī)動(dòng)目標(biāo)跟蹤算法,完整的15頁文檔論文。根據(jù)二維空間內(nèi)目標(biāo)作勻速直線運(yùn)動(dòng)和勻速圓周運(yùn)動(dòng)的特點(diǎn),在建立目標(biāo)運(yùn)動(dòng)模型和觀測(cè)模型的基礎(chǔ)上采用基于交互多模算法(IMM)的卡爾曼濾波器對(duì)機(jī)動(dòng)目標(biāo)進(jìn)行跟蹤。仿真結(jié)果表明,該算法不僅能夠?qū)蛩僦本€運(yùn)動(dòng)和勻速圓周運(yùn)動(dòng)的目標(biāo)進(jìn)行跟蹤,而且在運(yùn)動(dòng)模型發(fā)生變化時(shí),濾波誤差也比較小。
2121
matlab應(yīng)用與學(xué)習(xí) ??? 2年前
hypermesh多目標(biāo)優(yōu)化要注意那些問題?
hypermesh多目標(biāo)優(yōu)化要注意那些問題?
2749 5 1
lz1234 ??? 1年前
hypermesh多目標(biāo)加權(quán),怎么加權(quán)?
hypermesh多目標(biāo)加權(quán),怎么加權(quán)?
2231 2
lz1234 ??? 1年前
多目標(biāo)優(yōu)化時(shí)量綱歸一化問題?
我有兩個(gè)目標(biāo)函數(shù)分別是力均勻性和形面精度,需將這兩個(gè)目標(biāo)函數(shù)轉(zhuǎn)換成一個(gè)目標(biāo)函數(shù)f。在歸一化過程中,f1max,f1min,這些界限值是怎么選取的?是根據(jù)實(shí)際的需求,設(shè)定為固定值;還是說f1max f1min是要隨著迭代過程進(jìn)行也進(jìn)行變化?
2653 1 3
劉嫣然 ??? 3年前
AMESim電控單體泵高速電磁閥多目標(biāo)優(yōu)化分析 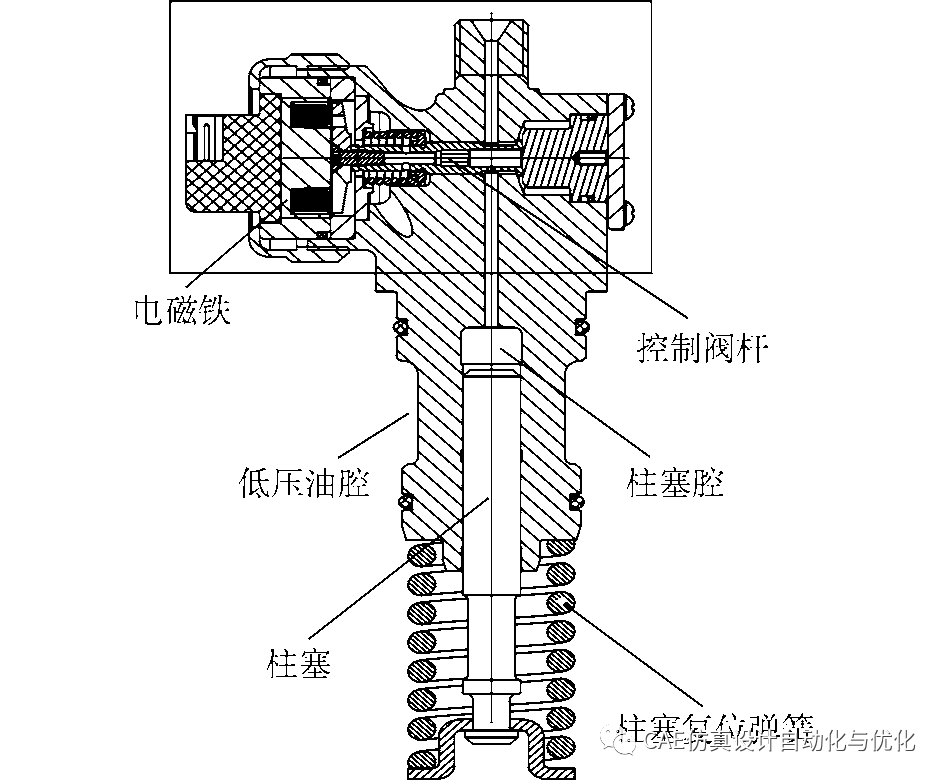
應(yīng)用多目標(biāo)多學(xué)科優(yōu)化平臺(tái)modeFRONTIER,采用NSGA-II遺傳算法,以電控單體泵高速電磁閥開啟、關(guān)閉響應(yīng)延遲時(shí)間作為目標(biāo)建立多目標(biāo)優(yōu)化模型。優(yōu)化結(jié)果顯示:關(guān)閉延遲時(shí)間減小了6% ,開啟延遲時(shí)間減小了17. 7% ,噴油壓力峰值增大0. 62MPa,有利于進(jìn)一步提高循環(huán)噴油量控制的精確程度。
2990 1
技術(shù)哥 ??? 3年前
多學(xué)科協(xié)同優(yōu)化論文復(fù)現(xiàn)isight
溫 et al_2013_基于iSIGHT軟件的協(xié)同優(yōu)化算法若干問題研究.pdfisight復(fù)現(xiàn)該論文,有償,200米
2330 1 1
mamba183 ??? 2年前
isight讀取到的最大mises應(yīng)力與abaqus云圖中的不一樣,并且差很多?
isight讀取到的最大溫度和abaqus中step1過程中的最大溫度一致,就應(yīng)力不一致,是哪里有問題嗎
4253 4 5
Nefelibata_1050 ??? 3年前
基于optistruct汽車控制臂三種工況、加上1階模態(tài)下的多目標(biāo)拓?fù)鋬?yōu)化案例 
本例以汽車控制臂三種工況、加上1階模態(tài)下的多目標(biāo)拓?fù)鋬?yōu)化為例,講述在optistruct中是如何進(jìn)行多目標(biāo)拓?fù)鋬?yōu)化,非公式,目的就是快速得到傳遞路徑,與傳統(tǒng)輸入公式傳遞路徑基本上百分九十以上的相似度,如果有需要公式方面的同學(xué)也可以聯(lián)系我,有相關(guān)的資料購買后對(duì)于模型中不懂的地方都可以問
2227 1 9
lz1234 ??? 3年前
多目標(biāo)遺傳算法實(shí)際案例——運(yùn)輸問題的matlab目標(biāo)函數(shù)代碼詳解 
該視頻介紹了一個(gè)具體運(yùn)輸問題的多目標(biāo)遺傳算法的應(yīng)用,詳細(xì)介紹了matlab目標(biāo)函數(shù)編碼
8
活潑可男_matlab教學(xué) ??? 1年前
Isight集成Meshworks和Optistruct 
采用Isight進(jìn)行多目標(biāo)多學(xué)科優(yōu)化,通過Isight集成和管理復(fù)雜的仿真流程,運(yùn)用多種優(yōu)化算法自動(dòng)探索得到優(yōu)化方案,從而縮短產(chǎn)品研制周期,降低研發(fā)成本。本例研究汽車副車架的強(qiáng)度、模態(tài)和質(zhì)量表現(xiàn)。主要是建立參數(shù)化模型后提交Optistruct求解,便于Isight進(jìn)行集成軟件。
2586 2 3
溫舊酒一壺 ??? 1年前
20條/頁 
 204
204 跳至頁

技術(shù)鄰APP
工程師必備
工程師必備
- 項(xiàng)目客服
- 培訓(xùn)客服
- 平臺(tái)客服
TOP
