



經(jīng)緯恒潤(rùn)組合導(dǎo)航產(chǎn)品國(guó)產(chǎn)化落地,助力L2+輔助駕駛 
而實(shí)現(xiàn)L2+功能,高精度定位的作用尤為突出,可以為自動(dòng)駕駛功能提供精確的定位,使感知融合更精確、控制算法更準(zhǔn)確,提升L2+的體驗(yàn)。組合導(dǎo)航產(chǎn)品(INS)通過(guò)衛(wèi)星定位加慣性定位融合的方式提供高精度、穩(wěn)定的、全場(chǎng)景的定位結(jié)果。 經(jīng)緯恒潤(rùn)組合導(dǎo)航產(chǎn)品應(yīng)對(duì)國(guó)產(chǎn)化的需求,已實(shí)現(xiàn)量產(chǎn)。
2288
經(jīng)緯恒潤(rùn) ??? 2年前
無(wú)人機(jī)導(dǎo)航定位系統(tǒng)關(guān)鍵技術(shù)研究 
定位精度也是無(wú)人機(jī)自主定位算法的關(guān)鍵問(wèn)題。目前無(wú)人機(jī)的視覺(jué)圖像處理是基于像素的,圖像質(zhì)量的好壞將直接影響圖像特征點(diǎn)的代表性和準(zhǔn)確性。圖像處理和計(jì)算也是算法中最耗時(shí)的部分。 視覺(jué)導(dǎo)航技術(shù)是指利用計(jì)算機(jī)視覺(jué)技術(shù)對(duì)無(wú)人機(jī)航拍圖像進(jìn)行處理和分析,根據(jù)視覺(jué)定位算法可以估計(jì)無(wú)人機(jī)的當(dāng)前位置。
2324
無(wú)人機(jī)圈 ??? 4年前
千耘導(dǎo)航QYX—明明有顏值,硬要靠實(shí)力 
高質(zhì)量的慣性導(dǎo)航器件,配合先進(jìn)的組合導(dǎo)航3D補(bǔ)償算法,可適應(yīng)不同地況作業(yè)需求。數(shù)據(jù)云端存儲(chǔ),一鍵共享不用擔(dān)心因誤刪數(shù)據(jù)而帶來(lái)不便。基準(zhǔn)線、作業(yè)信息及農(nóng)具參數(shù)等數(shù)據(jù)在云端同步存儲(chǔ),安全可靠。AB線一鍵共享,多機(jī)協(xié)同作業(yè)便捷。同一田塊不同作業(yè),不僅本機(jī)可以直接復(fù)用AB線數(shù)據(jù),其他QYX千耘導(dǎo)航在該塊地也可以共享。
2772
千尋位置行業(yè)應(yīng)用 ??? 3年前
這家高精定位巨頭,為何拼命盤(pán)活「北斗+」生態(tài)? 
例如,已在北斗智能市場(chǎng)上架展示的高精度組合導(dǎo)航系統(tǒng)X1,就是一款湖南北云科技提供的可為無(wú)人環(huán)衛(wèi)車(chē),無(wú)人出租車(chē),無(wú)人礦卡,干線物流、港口自動(dòng)駕駛等提供高精度定位的產(chǎn)品,高集成度的 GNSS/INS 組合導(dǎo)航系統(tǒng),采用深耦合算法,將IMU與RTK解算、觀測(cè)量預(yù)處理深度融合,搭載了千尋位置提供的厘米級(jí)差分定位服務(wù),并通過(guò)雙天線接收包括北斗導(dǎo)航系統(tǒng)在內(nèi)的五大導(dǎo)航系統(tǒng)的GNSS 信號(hào),使得車(chē)輛在城市復(fù)雜道路等場(chǎng)景下
1917
千尋位置行業(yè)應(yīng)用 ??? 3年前
3大場(chǎng)景、4款新品公開(kāi)亮相:「低速智能駕駛」新賽道惹關(guān)注 
而組合導(dǎo)航X1即使在高架橋、林蔭道、隧道、地下停車(chē)場(chǎng)等衛(wèi)星信號(hào)失鎖的場(chǎng)景下,也能夠保障連續(xù)不斷的高精度定位服務(wù)。 深耦合組合導(dǎo)航 X1組合導(dǎo)航系統(tǒng)由北云科技自研的 GNSS 高精度定位定向板卡和戰(zhàn)術(shù)級(jí)IMU組成,以深耦合方式結(jié)合GNSS和INS系統(tǒng)。
2274
千尋位置行業(yè)應(yīng)用 ??? 3年前
千耘導(dǎo)航為什么值得信賴(lài) 
千尋位置推出的千耘導(dǎo)航系列,在產(chǎn)品性能的穩(wěn)定性方面樹(shù)立了良好的用戶口碑。那么是在哪些方面贏得了信賴(lài)? 研發(fā)實(shí)力雄厚,算法能力強(qiáng) 千尋位置利用北斗地基增強(qiáng)站以及星基增強(qiáng)系統(tǒng)和自主研發(fā)的定位算法,通過(guò)互聯(lián)網(wǎng)技術(shù)進(jìn)行大數(shù)據(jù)運(yùn)算,為全球用戶提供精準(zhǔn)定位及延展服務(wù)。
2067 1
千尋位置行業(yè)應(yīng)用 ??? 3年前
北斗星耀,導(dǎo)航天下:中國(guó)北斗衛(wèi)星導(dǎo)航系統(tǒng)的發(fā)展歷程與應(yīng)用現(xiàn)狀 
北斗系統(tǒng)具有以下特點(diǎn):一是北斗系統(tǒng)空間段采用三種軌道衛(wèi)星組成的混合星座,與其他衛(wèi)星導(dǎo)航系統(tǒng)相比高軌衛(wèi)星更多,抗遮擋能力強(qiáng),尤其低緯度地區(qū)性能優(yōu)勢(shì)更為明顯。二是北斗系統(tǒng)提供多個(gè)頻點(diǎn)的導(dǎo)航信號(hào),能夠通過(guò)多頻信號(hào)組合使用等方式提高服務(wù)精度。三是北斗系統(tǒng)創(chuàng)新融合了導(dǎo)航與通信能力,具備定位導(dǎo)航授時(shí)、星基增強(qiáng)、地基增強(qiáng)、精密單點(diǎn)定位、短報(bào)文通信和國(guó)際搜救等多種服務(wù)能力。
2751
千尋位置行業(yè)應(yīng)用 ??? 2年前
千耘導(dǎo)航助力山藥種植戶高效高產(chǎn) 
千耘QY310開(kāi)溝作業(yè)中 千耘導(dǎo)航QY310超低速作業(yè),精度2cm 搭載千尋位置農(nóng)機(jī)自動(dòng)駕駛系統(tǒng)的拖拉機(jī)能夠輕松實(shí)現(xiàn)超低速直線開(kāi)溝,作業(yè)速度可達(dá)0.1km/h,直線精度2cm,不僅有效提高作業(yè)效率、助力山藥增產(chǎn),還能降低農(nóng)機(jī)手勞動(dòng)強(qiáng)度。 千尋位置農(nóng)機(jī)自動(dòng)駕駛系統(tǒng)基于高精度衛(wèi)星定位、組合導(dǎo)航、自動(dòng)控制技術(shù),系統(tǒng)可自動(dòng)控制車(chē)輛轉(zhuǎn)向,使車(chē)輛按既定路線高精度自動(dòng)駕駛。
2025
千尋位置行業(yè)應(yīng)用 ??? 3年前
千耘導(dǎo)航QY210pro|供不應(yīng)求的星導(dǎo)航 
無(wú)需基站、沒(méi)有4G網(wǎng),導(dǎo)航也可以高精度作業(yè)開(kāi)機(jī)3分鐘內(nèi)即可達(dá)到±2.5cm精度的星基服務(wù) 千耘導(dǎo)航QY210Pro是千尋位置憑借自己團(tuán)隊(duì)強(qiáng)大的算法能力,于2021年推出的業(yè)內(nèi)首款星地一體版農(nóng)機(jī)導(dǎo)航,解決了用戶使用農(nóng)機(jī)導(dǎo)航信號(hào)穩(wěn)定性不夠的痛點(diǎn),尤其是在偏遠(yuǎn)和兩省交界地等通信網(wǎng)絡(luò)不好的環(huán)境下,依舊可以保持良好的精度和穩(wěn)定性,也因此贏得了用戶的關(guān)注和傾心。
2037
千尋位置行業(yè)應(yīng)用 ??? 3年前
北斗導(dǎo)航——人類(lèi)生活中不可或缺的一部分 
千尋位置基于北斗衛(wèi)星系統(tǒng)(兼容GPS、GLONASS、Galileo)基礎(chǔ)定位數(shù)據(jù),利用遍布全球的3700多個(gè)地基增強(qiáng)站、自主研發(fā)的定位算法及大規(guī)模互聯(lián)網(wǎng)服務(wù)平臺(tái),可為用戶提供厘米級(jí)定位、毫米級(jí)感知、納秒級(jí)授時(shí)的時(shí)空智能服務(wù)。以陸地應(yīng)用為例,北斗導(dǎo)航可以為移動(dòng)電話、物流運(yùn)輸?shù)葮I(yè)務(wù)提供準(zhǔn)確的定位服務(wù)。在海洋上,北斗導(dǎo)航可以為漁業(yè)、船舶、海警等提供導(dǎo)航定位服務(wù)。
1983 1
千尋位置行業(yè)應(yīng)用 ??? 2年前
如何挑選一款靠譜的農(nóng)機(jī)導(dǎo)航做代理? 
北斗產(chǎn)業(yè)國(guó)家級(jí)力量“員工1000+,其中碩博科研人才比例42%”、“專(zhuān)利申請(qǐng)量超過(guò)660件”、“總用戶數(shù)超過(guò)14億”、“服務(wù)覆蓋230+國(guó)家和地區(qū)”、“自主研發(fā)核心算法”。產(chǎn)品性能穩(wěn)定可信賴(lài)身為北斗產(chǎn)業(yè)國(guó)家級(jí)力量的千尋位置,基于中國(guó)北斗衛(wèi)星導(dǎo)航系統(tǒng),在全球率先構(gòu)建“星地一體”的時(shí)空智能基礎(chǔ)設(shè)施,形成了全球衛(wèi)星導(dǎo)航領(lǐng)域的創(chuàng)新方案。
2073
千尋位置行業(yè)應(yīng)用 ??? 3年前
如何做好全自動(dòng)化ADAS 高精度標(biāo)注? 
在自動(dòng)化標(biāo)注流程中,自車(chē)運(yùn)動(dòng)(Egomotion)精度——即車(chē)輛自身空間移動(dòng)軌跡的估計(jì)精度,是易被忽視卻至關(guān)重要的因素。由于該方案依賴(lài)聚合點(diǎn)云(Aggregated Point Cloud)進(jìn)行標(biāo)注,即便微小的自車(chē)運(yùn)動(dòng)估計(jì)誤差,也會(huì)導(dǎo)致3D包圍盒的尺寸與位置畸變,進(jìn)而產(chǎn)生標(biāo)注誤差。
2191
康謀keymotek ??? 4月前
自動(dòng)駕駛關(guān)鍵技術(shù)淺析 
通過(guò)更高維數(shù)的數(shù)據(jù)結(jié)合高效率的匹配算法,高精度地圖能夠?qū)崿F(xiàn)更高尺度的定位與匹配。 2)輔助環(huán)境感知。對(duì)傳感器無(wú)法探測(cè)的部分進(jìn)行補(bǔ)充,進(jìn)行實(shí)時(shí)狀況的監(jiān)測(cè)及外部信息的反饋 :傳感器作為無(wú)人駕駛的眼睛,有其局限所在,如易受惡劣天氣的影響,此時(shí)可以使用高精度地圖來(lái)獲取當(dāng)前位置精準(zhǔn)的交通狀況。 3)路徑規(guī)劃。
2355 1
洋娃娃和小熊 ??? 4年前
CFD的解析精度與可信度 
檢查幾何模型 分析是否忽略了關(guān)鍵幾何特征、檢查邊界位置是否合適。很多時(shí)候邊界位置設(shè)得不合適,可能會(huì)導(dǎo)致計(jì)算振蕩,不收斂等情況發(fā)生。同時(shí),由于不同的軟件對(duì)于不同的邊界組合方式處理方法存在差異,需要選擇合適的邊界組合方式(如FLUENT中壓力邊界與outflow邊界相沖,最好不要同時(shí)出現(xiàn),可能導(dǎo)致收斂問(wèn)題。流量入口邊界收斂要比壓力入口困難)。 2.
2605
網(wǎng)格大師 ??? 2年前
重復(fù)使用航天運(yùn)載器的發(fā)展及其關(guān)鍵技術(shù) 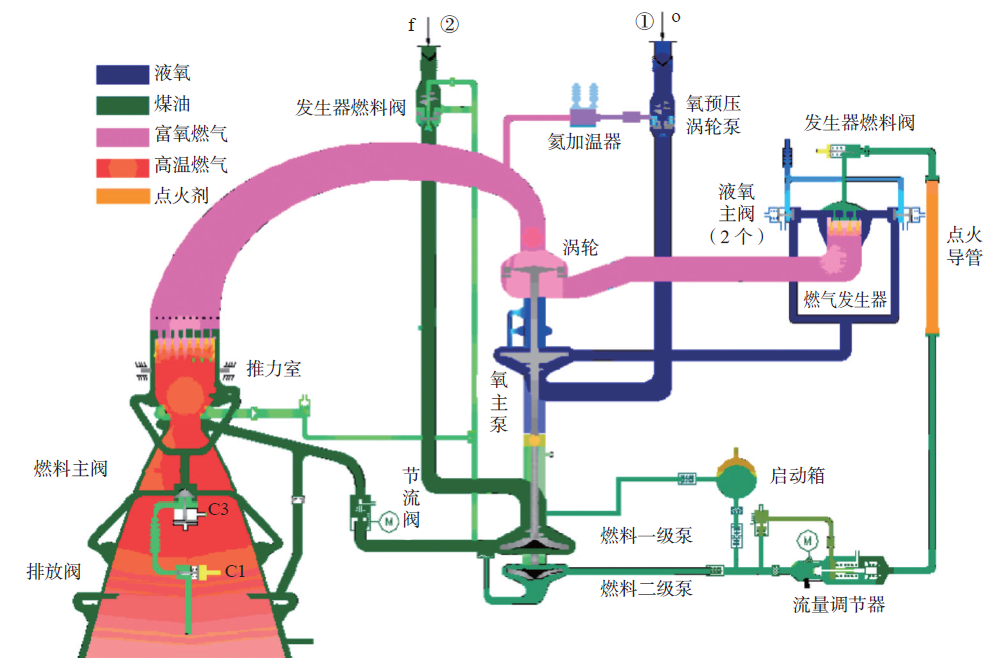
高精度導(dǎo)航重復(fù)使用航天運(yùn)載器的返回過(guò)程對(duì)導(dǎo)航精度要求很高。隨著火箭距離著陸場(chǎng)越來(lái)越近,大氣環(huán)境更為復(fù)雜,慣性/衛(wèi)星組合導(dǎo)航方法已無(wú)法滿足任務(wù)需求。應(yīng)當(dāng)結(jié)合地面輔助導(dǎo)航方法提升導(dǎo)航精度,例如采用差分全球定位系統(tǒng)(Differential Global Positioning System,DGPS)高精度導(dǎo)航,可將其基站布置在著陸場(chǎng)。
2979
看航空 ??? 3年前
科普貼 | 一文秒懂PPP-RTK
隨著時(shí)間的推移,載波相位差分技術(shù)(RTK)和精密單點(diǎn)定位技術(shù)(PPP),成為高精度衛(wèi)星導(dǎo)航定位中應(yīng)用最為廣泛、也最具有代表性的兩種技術(shù)路線。 這兩種技術(shù)各有利弊。
2888
無(wú)人機(jī)10086 ??? 4年前
飛行器系統(tǒng)仿真與驗(yàn)證 
圖7 導(dǎo)航計(jì)算在測(cè)量裝置和控制算法建模時(shí),可以施加必要的擾動(dòng)和噪聲模型,并考慮初始對(duì)準(zhǔn)和初始姿態(tài)的影響。由于各類(lèi)靜、動(dòng)態(tài)誤差和噪聲的存在,在慣性導(dǎo)航計(jì)算中,一般通過(guò)姿態(tài)算法和濾波算法來(lái)減小誤差的影響,提高控制精度。
3811 2 1
航發(fā)設(shè)計(jì) ??? 3年前
塔架環(huán)境下運(yùn)載火箭天線耦合輻射仿真研究 
[3]陳隨斌, 任紅宇, 章泉源.整星狀態(tài)下復(fù)雜衛(wèi)星多天線組合測(cè)試[J]. 上海航天, 2015, 32(3): 63-67.[4]謝廣錢(qián), 劉波, 張新剛, 等.混合算法分析衛(wèi)星星體對(duì)導(dǎo)航天線輻射特性的影響[J]. 計(jì)算機(jī)測(cè)量與控制, 2015, 23(8): 2792-2794.
4022 3 1
航模無(wú)人機(jī)干貨分享 ??? 2年前
千耘農(nóng)機(jī)導(dǎo)航的“星地一體”能力究竟是什么? 
A: 1、直連衛(wèi)星通訊,不受通信運(yùn)營(yíng)商4G/5G網(wǎng)絡(luò)信號(hào)覆蓋限制;2、能接收衛(wèi)星通信信號(hào)的地方都能用,不受地基增強(qiáng)站的限制;3、2.5cm精度、50秒-5分鐘收斂時(shí)間 “星地一體”廣泛造福于各地農(nóng)耕位置:新疆阿克蘇地理環(huán)境:地處南疆中部、塔克拉瑪干大沙漠邊緣 棉花種植戶在這樣的環(huán)境下種棉花,對(duì)于農(nóng)機(jī)導(dǎo)航的性能要求,尤其是信號(hào)穩(wěn)定性極具考驗(yàn)
2002
千尋位置行業(yè)應(yīng)用 ??? 3年前
高級(jí)別智能駕駛業(yè)務(wù)系列:自動(dòng)駕駛系統(tǒng) 
該技術(shù)方案基于經(jīng)緯恒潤(rùn)多年以來(lái)在自動(dòng)駕駛算法商業(yè)化落地積累的多項(xiàng)技術(shù)突破,不斷挑戰(zhàn)升級(jí),確保系統(tǒng)足夠的安全和高效可靠。全局導(dǎo)航算法 經(jīng)緯恒潤(rùn)的全局導(dǎo)航算法,結(jié)合了港口園區(qū)運(yùn)營(yíng)環(huán)境和實(shí)際生產(chǎn)需求,根據(jù)車(chē)隊(duì)調(diào)度管理平臺(tái)基于系統(tǒng)均衡理論下發(fā)的路線信息、任務(wù)信息,并參考高精地圖和場(chǎng)地內(nèi)實(shí)時(shí)識(shí)別的障礙物信息規(guī)劃出滿足車(chē)輛動(dòng)力學(xué)要求、避開(kāi)障礙物的車(chē)端導(dǎo)航全局路徑。
3808 1
經(jīng)緯恒潤(rùn) ??? 2年前
20條/頁(yè) 
 64
64 跳至頁(yè)

技術(shù)鄰APP
工程師必備
工程師必備
- 項(xiàng)目客服
- 培訓(xùn)客服
- 平臺(tái)客服
TOP
