



ABAQUS-氣動驅(qū)動PneuNet結構軟體機器人仿真 

課程共分為三個章節(jié):章節(jié)1-氣動驅(qū)動軟體機器人驅(qū)動原理與仿真分析方法章節(jié)2-基于Fluid Cavity加載方式的軟體機器人仿真流程章節(jié)3-基于Pressure加載方式的軟體機器人仿真流程
3764 6
Sunshine1516 ??? 3年前
abaqus----帶限位圈約束的氣動軟體機器人仿真 
本人工科碩士在讀,此視頻是一個課程介紹,完整版從0--1對帶限位圈約束的氣動軟體機器人仿真的所有操作進行了全程錄屏教學,學者可快速精通此分析,按照Abaqus有限元分析流程對part、material、assembly、mesh、step、interaction、load等7個模塊進行了視頻精講,總課時24分鐘,此方向直接達到精通水平。提供永久免費答疑,有問題直接問。
CAE_xiaonuo ??? 2年前
設計仿真 | AI+仿真雙驅(qū)動!海克斯康領跑人形機器人研發(fā) 
通過以上多方面的應用,海克斯康工業(yè)仿真軟件能夠為人形機器人的研發(fā)提供全面的技術支持,幫助研發(fā)人員解決從機械設計到控制系統(tǒng)開發(fā),從結構強度到驅(qū)動系統(tǒng)設計等一系列復雜問題,加速人形機器人的研發(fā)進程,提升產(chǎn)品的競爭力。真實案例見證海克斯康工業(yè)仿真軟件的強大實力海克斯康工業(yè)仿真軟件在人形機器人研發(fā)領域的應用已經(jīng)取得了顯著的成果。
3242 1 1
海克斯康設計與仿真 ??? 1年前
【科技前沿】打印出行走的軟體機器人 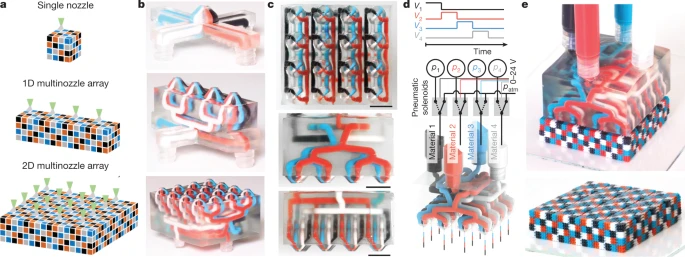
為了證明MM3D打印對打印對象的組成、結構及特性的空間編程能力,文章列舉了打印折紙機構以及氣動行走機器人的兩個例子。圖4 MM3D打印折紙圖5 打印行走軟體機器人展望未來,這種集成化的多材料打印噴頭將實現(xiàn)體素化功能性結構的快速打印,此外在打印分辨率和打印效率方面,定制化的打印墨水和打印結構的功能化同樣具有重要的研究和應用價值。
2209
機械工程師 ??? 3年前
新興行業(yè) | 9場應用類仿真專題直播,聚焦前沿技術融合 
采用Ansys仿真平臺,能夠?qū)?em>機器人用的電機、電機控制器、PCB板、電源、電池等,進行電磁性能、電磁兼容性能、溫度性能、結構穩(wěn)定性等多物理場的仿真分析和優(yōu)化,協(xié)助用戶設計出性價比高、性能穩(wěn)定的機器人。
1101
Ansys中國 ??? 1月前
Adams管路機器人仿真 
管理機器人的具體結構如下: 如上圖,機器人主要由前后各三個支腿組成,支腿邊緣各有一個驅(qū)動輪,同時為了使支腿實現(xiàn)運動以適應管壁,在支腿側邊添加可伸縮斜支撐。
4327 1
擺渡人張 ??? 2年前
六軸碼垛機器人admas正逆運動學仿真 
圖5-11 導入ADAMS的部件選擇 圖5-12 導入ADAMS的樣機模型 5.4 機器人運動學仿真 5.4.1 軌跡規(guī)劃 軌跡規(guī)劃即為求解機器人運動學逆解的過程。將機器人模型導入ADAMS后,首先是為機器人添加材料,本機器人結構為鋁合金。
2373
余俊煒 ??? 3年前
Kiva機器人大拆解,領取Kiva機器人數(shù)模 
系統(tǒng)架構和機械結構 從外面看,Kiva機器人外殼的每一側都有紅外傳感陣列,以及氣動保險杠,用于檢測和緩沖碰撞。外殼上還有充電接口和一系列狀態(tài)指示燈。 每一臺Kiva機器人有三個獨立的自由度:兩個驅(qū)動輪,加上一個用于起重的旋轉電機。起重電機轉動時,兩個驅(qū)動輪反方向旋轉,結果是托盤相對于地面沒有旋轉,只在滾珠絲杠的作用下升高。
3096
工廠物流自動化 ??? 4年前
2024年RecurDyn優(yōu)秀案例競賽作品分享:核探測機器人底盤設計與越障性能仿真驗證 
由上述仿真過程與分析結果可知機器人整體結構設計不存在明顯缺陷,同時也驗證了機器人虛擬樣機模型建立的準確性。 之后對機器人進行原地轉向性能仿真,兩側驅(qū)動輪速度大小相等、方向相反,其仿真結果如圖3-4所示,其中圖3-4(a)為兩側驅(qū)動扭矩,在轉向過程中最大驅(qū)動扭矩為31N.m左右,與理論計算結果高度吻合。
2554
杭州擬創(chuàng)(RecurDyn原廠) ??? 1年前
Adams管路機器人仿真
管理機器人的具體結構如下: 如上圖,機器人主要由前后各三個支腿組成,支腿邊緣各有一個驅(qū)動輪,同時為了使支腿實現(xiàn)運動以適應管壁,在支腿側邊添加可伸縮斜支撐。
3747
擺渡人張 ??? 2年前
機器人行業(yè)工程仿真分析解決方案 
優(yōu)飛迪依托國際領先的工程仿真軟件以及強大的技術服務能力與豐富的機器人行業(yè)服務經(jīng)驗,基于“仿真驅(qū)動設計”的新研發(fā)模式,針對各種仿真需求,創(chuàng)造性的提出機器人行業(yè)仿真設計解決方案,以解決目前機器人行業(yè)存在的三大痛點問題: 找不到適合本企業(yè)和工程師團隊的工程仿真軟件、仿真精度難以滿足本企業(yè)的需求、求解速度難以滿足本企業(yè)的需求。
2550
Cruise ??? 4年前
基于SolidWorks的自動裝卸機械結構設計 
工業(yè)機械手的生 產(chǎn)效率高,不僅能夠?qū)崿F(xiàn)不間斷工作,還能夠?qū)崿F(xiàn)物料轉移位 置精度可控,因此具備高精度、高效率的優(yōu)勢,尤其是在低壓、 低溫、高壓、高溫環(huán)境中應用,能夠代替人工工作,避免在特殊 環(huán)境中對人造成傷害。 1 自動裝卸機械結構的功能 自動裝卸機械結構終端為氣動夾爪,能夠?qū)崿F(xiàn)抓放的動 作,通過雙電控電磁閥和雙作用氣缸實現(xiàn)控制。
4672 5
太極元氣 ??? 2年前
小米發(fā)布仿生四足機器人“鐵蛋”!解讀背后的建模和仿真技術 
首先,利用SolidWorks建立四足機器人的三維模型,在Adams中建立虛擬樣機,設置環(huán)境模擬量模擬四足機器人在現(xiàn)實環(huán)境中的運動和狀態(tài)。然后,為實現(xiàn)四足機器人穩(wěn)定行走,需要實時地對四足機器人狀態(tài)進行分析和控制。Adams和Matlab的聯(lián)合仿真可實現(xiàn)這一過程。整個過程中Adams虛擬樣機作為被控制對象,需要從Matlab中獲得驅(qū)動數(shù)據(jù)。
2920
深圳北鯤云計算有限公司 ??? 3年前
《基于 ABAQUS 的桁架機器人模態(tài)分析》 
若是桁架機器人出現(xiàn)了共振的現(xiàn) 象,末端執(zhí)行器的變化會非常大。因此,在確保桁 架機器人工作效率的前提下,可以通過控制桁架機 器人驅(qū)動系統(tǒng)中的伺服電機的工作速度,使其激振 頻率遠離桁架機器人的整體結構的固有頻率,從而 避免工作過程中發(fā)生共振現(xiàn)象,影響機器人的工作 精度以及使用壽命。
3088 2
CAEer吳皓 ??? 2年前
RecurDyn機器人仿真應用及核心技術路線詳解 
</p><p><strong>Step2 向運動副施加驅(qū)動運動</strong>:將逆運動學計算得到的關節(jié)角度曲線,通過Expression定義Motion,直接施加到機器人的各個關節(jié)上,驅(qū)動機器人按預定軌跡執(zhí)行動作。
2382 1
杭州擬創(chuàng)(RecurDyn原廠) ??? 4月前
碼垛機器人admas仿真 
機器人動力學仿真按照運動學仿真的類似步驟為機器人添加材料、運動副和關節(jié)驅(qū)動,給機器人手腕末端施加50N最大負載,仿真模型如圖5-17。
2276
余俊煒 ??? 3年前
基于實際工程的飛行器氣動設計與仿真 
實際工作當中,CFD工程師每個人都可以很順利的完成仿真工作,但兩個人的結果往往差異很大。發(fā)生這種情況,如果是熟練工程師,絕大多數(shù)情況下,其實這兩人心中都知道誰的數(shù)值更準一些。這里想表達什么?CFD本質(zhì)上是個良心活,需要極高的責任心! CFD的議題很大,下面僅僅就本人實際工作中,運用CFD的一點兒體會,跟大家交流一下。 5.1.
6068
我愛飛機 ??? 2年前
鈦絲驅(qū)動應用案例(NiTiDrivetech)-仿生機器人-手 
仿生機器人一、手的案例1、結構設計 驅(qū)動介紹: 可以實現(xiàn)任意手指的萬向運動,完全模仿人手的靈活性,接觸力柔和可控,碰撞時可形變卸力,無剛性沖擊。 驅(qū)動原理:以鈦絲相變實現(xiàn) “收縮 - 恢復”,連續(xù)柔順,可模擬肌肉蠕動 / 彎曲帶動手關節(jié)彎曲和伸展。2、實物形態(tài) 覆膜一副硅膠仿真手套,就可以實現(xiàn)功能、外觀的仿生效果了。
1286
財哥說鈦絲 ??? 2月前
磁性噴霧劑,簡單噴一噴即可快速“制造”機器人 (轉載) 
該研究團隊通過分別為棉線(1D)、折紙(2D 平面)、聚二甲基硅氧烷(PDMS)薄膜(2D 曲面/軟面)和塑料管(3D 圓形物體)噴涂 M-spray,使其轉化為了軟體爬行機器人、多足機器人、行走機器人和滾動機器人。“按需編程”的機器人當前,無論是醫(yī)療診斷機器人、管道檢測機器人,還是昆蟲式機器人等,在設計之初,其結構、用途、控制運動的程序均已確定,其靈活性受到了嚴重的制約。
3025 91
琳泓comsol ??? 5年前
設計仿真 | Cradle CFD助力新能源汽車電驅(qū)動設備噴油冷卻散熱仿真 
除此之外,Cradle CFD整合了多物理場協(xié)同仿真和單向聯(lián)合仿真功能,以實現(xiàn)與結構、聲學、電磁、機械、一維、優(yōu)化、熱環(huán)境、3D CAD和其他分析工具的耦合,從而使用戶能夠有效地解決跨多個學科的工程問題。
2152
海克斯康設計與仿真 ??? 3年前
20條/頁 
 12
12 跳至頁

技術鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP
