



粒子群優(yōu)化 (PSO)
在這里,我們將詳細(xì)解釋這兩者:
</div><div contenteditable="false" width="100%">
粒子群優(yōu)化 (PSO)
</div><div contenteditable="false" width="100%">
粒子群優(yōu)化 (PSO) 是一種優(yōu)化技術(shù),其中一組潛在解決方案使用鳥(niǎo)類(lèi)成群或魚(yú)群的社會(huì)行為來(lái)解決問(wèn)題。
2157
仿真資料吧 ??? 1年前
基于粒子群優(yōu)化算法的六自由度機(jī)械臂三維空間避障規(guī)劃 
圖2 三維空間避障路徑規(guī)劃問(wèn)題描述1.2 粒子群優(yōu)化算法求解粒子群優(yōu)化算法(Particle Swarm Optimization, PSO)是一種基于群體智能的優(yōu)化算法,模擬了鳥(niǎo)群覓食等自然現(xiàn)象,通過(guò)個(gè)體間的信息共享來(lái)尋找最優(yōu)解。該算法具有簡(jiǎn)單、易實(shí)現(xiàn)和全局搜索能力強(qiáng)等優(yōu)點(diǎn),非常適合用于復(fù)雜環(huán)境下的路徑規(guī)劃問(wèn)題。
2409
320科技工作室 ??? 1年前
粒子群優(yōu)化 (PSO)
這些算法可以應(yīng)用由所有實(shí)體共享的簡(jiǎn)單規(guī)則,并能夠利用個(gè)人之間的交互(稱為代理)在相互合作的基礎(chǔ)上解決優(yōu)化問(wèn)題。 在眾多的群體智能算法中,最常用的兩種算法是粒子群優(yōu)化器 (PSO) 和蟻群優(yōu)化器 (ACO)。在這里,我們將詳細(xì)解釋這兩者: 粒子群優(yōu)化 (PSO) 粒子群優(yōu)化 (PSO) 是一種優(yōu)化技術(shù),其中一組潛在解決方案使用鳥(niǎo)類(lèi)成群或魚(yú)群的社會(huì)行為來(lái)解決問(wèn)題。
2315
仿真資料吧 ??? 1年前
Lumerical案例 | 基于粒子群優(yōu)化的雙波段MIM濾波器引領(lǐng)高靈敏度檢測(cè)革新 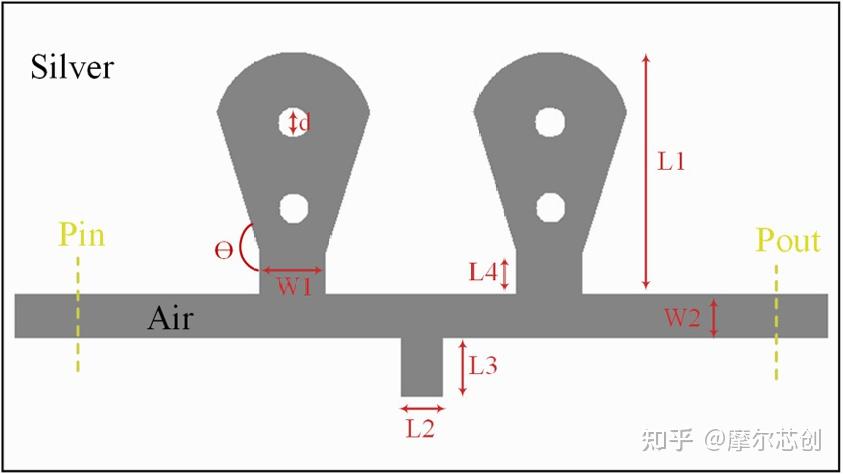
這些參數(shù)的初始值為后續(xù)優(yōu)化提供了重要參考。粒子群優(yōu)化算法的精準(zhǔn)調(diào)控為突破傳統(tǒng)優(yōu)化方法的瓶頸,本研究引入粒子群優(yōu)化(PSO)算法對(duì)濾波器尺寸進(jìn)行全局優(yōu)化。在優(yōu)化過(guò)程中,PSO算法的目標(biāo)函數(shù)被設(shè)計(jì)為優(yōu)化MIM濾波器的傳輸特性。
2489
摩爾芯創(chuàng) ??? 4月前
常用參數(shù)自動(dòng)標(biāo)定算法總結(jié)(單純形,遺傳算法,貝葉斯優(yōu)化算法,粒子群算法等) 
在本推文中介紹四類(lèi)常用參數(shù)自動(dòng)標(biāo)定方案,分別是單純形方案,粒子群方案,遺傳算法方案,以及貝葉斯優(yōu)化ego方案。單純形方案實(shí)現(xiàn)最簡(jiǎn)單,適用于少參數(shù),更窄的初始區(qū)間粒子群方案,遺傳算法方案適用于多參數(shù)更大的空間適合全局搜索ego方案相比于其余三類(lèi)方案的優(yōu)勢(shì)體現(xiàn)為EGO使用代理模型(如高斯過(guò)程回歸)來(lái)預(yù)測(cè)目標(biāo)函數(shù),極大減少了實(shí)際函數(shù)評(píng)估次數(shù)。
2571 1
晶體塑性有限元 ??? 1年前
粒子群算法PSO與MATLAB程序視頻教程動(dòng)態(tài)優(yōu)化及多目標(biāo)優(yōu)化 

算法分析背包問(wèn)題第九章 ?基于交叉變異的混合粒子群算法分析旅行商問(wèn)題第十章 ?基于交換序的粒子群算法再求解旅行商優(yōu)化問(wèn)題第十一章 ?基于敏感粒子的動(dòng)態(tài)粒子群算法尋找雙峰動(dòng)態(tài)函數(shù)最優(yōu)值第十二章 ?多目標(biāo)背包優(yōu)化問(wèn)題用多目標(biāo)粒子群算法求解第十三章 ?網(wǎng)絡(luò)流傳與正版粒子群算法工具箱PSOt應(yīng)用第十四章 ?MATLAB自帶算法命令與約束CPSO工具箱詳解第十五章 ?約束CPSO工具箱編程應(yīng)用及各種類(lèi)型程序
910 1 10
鄭一 ??? 7年前
1-63基于matlab的生物地理的優(yōu)化器(BBO)被用作多層感知器(MLP)的訓(xùn)練器。粒子群優(yōu)化(PSO)、蟻群優(yōu)化(ACO)、遺傳算法(GA)、進(jìn)化策略(ES)和基于概率的增量學(xué)習(xí)(PBIL) 
基于matlab的生物地理的優(yōu)化器(BBO)被用作多層感知器(MLP)的訓(xùn)練器。粒子群優(yōu)化(PSO)、蟻群優(yōu)化(ACO)、遺傳算法(GA)、進(jìn)化策略(ES)和基于概率的增量學(xué)習(xí)(PBIL)。計(jì)算了BBO-MLP、PSO、ACO、ES、GA和PBIL的分類(lèi)精度并相互比較。輸出每種算法的收斂曲線和分類(lèi)精度。程序已調(diào)通,可直接運(yùn)行。購(gòu)買(mǎi)后可下載視頻中的源程序文件。
259
matlab應(yīng)用與學(xué)習(xí) ??? 1年前
265 基于matlab的粒子群優(yōu)化分?jǐn)?shù)階灰色預(yù)測(cè)模型 
基于matlab的粒子群優(yōu)化分?jǐn)?shù)階灰色預(yù)測(cè)模型,以誤差結(jié)果為目標(biāo)進(jìn)行預(yù)測(cè),輸出多個(gè)預(yù)測(cè)結(jié)果。并輸出迭代曲線。程序已調(diào)通,可直接運(yùn)行。
2098 1
matlab應(yīng)用與學(xué)習(xí) ??? 2年前
1-89基于matlab的人工蜂群和粒子群混合優(yōu)化的路徑規(guī)劃算法 
基于matlab的人工蜂群和粒子群混合優(yōu)化的路徑規(guī)劃算法,起點(diǎn)和終點(diǎn)確定的前提下,在障礙物中尋找最佳路徑。數(shù)據(jù)可更換自己的,程序已調(diào)通,可直接運(yùn)行。購(gòu)買(mǎi)后可下載視頻中的源程序文件。
241
matlab應(yīng)用與學(xué)習(xí) ??? 1年前
汽車(chē)消聲器連結(jié)法蘭盤(pán)沖壓成形工藝參數(shù)優(yōu)化 
[8] 王星博,李本威,王永華,等.連分式擴(kuò)充的粒子群神經(jīng)網(wǎng)絡(luò)壓氣機(jī)特性重構(gòu)方法[J].航空動(dòng)力學(xué)報(bào),2012,27(07):1464-1471.[9] 張欣潮.基于智能算法的數(shù)量化金融預(yù)測(cè)系統(tǒng)研究[D].北京:中國(guó)人民大學(xué),2011.文章來(lái)源內(nèi)燃機(jī)與配件. 2023(19)
4618 6 1
金屬加工前沿 ??? 2年前
1-106基于matlab的粒子群算法與 Simulink 模型之間連接的橋梁是粒子(即PID控制器參數(shù))和該粒子對(duì)應(yīng)的適應(yīng)值(即控制系統(tǒng)的性能指標(biāo)) 
優(yōu)化過(guò)程如下:PSO 產(chǎn)生粒子群(可以是初始化粒子群,也可以是更新后的粒子群),將該粒子群中的粒子依次賦值給 PID 控制器的參數(shù) Kp、Ki、Kd,然后運(yùn)行控制系統(tǒng)的Simulink 模型,得到該組參數(shù)對(duì)應(yīng)的性能指標(biāo),該性能指標(biāo)傳遞到 PSO中作為該粒子的適應(yīng)值,最后判斷是否可以退出算法。程序已調(diào)通,可直接運(yùn)行。購(gòu)買(mǎi)后可下載視頻中的源程序文件。
401
matlab應(yīng)用與學(xué)習(xí) ??? 1年前
CFDPro顆粒流仿真 | 基于拉格朗日粒子追蹤方法,模擬復(fù)雜顆粒的流動(dòng)現(xiàn)象 
顆粒流模擬仿真模塊ParticlePro為積鼎科技自主研發(fā)的顆粒流模擬模塊,該模塊是基于拉格朗日粒子追蹤方法,專(zhuān)為解決復(fù)雜顆粒流動(dòng)現(xiàn)象而設(shè)計(jì),可用于發(fā)動(dòng)機(jī)吸雨吸雹、發(fā)動(dòng)機(jī)葉片顆粒流、微小粒子撞擊損傷等應(yīng)用場(chǎng)景的仿真分析。 拉格朗日粒子追蹤支持顆粒間的直接碰撞模型,考慮顆粒間的彈性碰撞、摩擦力等相互作用,以模擬顆粒群的集體行為。
3096
積鼎CFD流體仿真模擬 ??? 1年前
63基于matlab的生物地理的優(yōu)化器(BBO)被用作多層感知器(MLP)的訓(xùn)練器。 
基于matlab的生物地理的優(yōu)化器(BBO)被用作多層感知器(MLP)的訓(xùn)練器。粒子群優(yōu)化(PSO)、蟻群優(yōu)化(ACO)、遺傳算法(GA)、進(jìn)化策略(ES)和基于概率的增量學(xué)習(xí)(PBIL)。計(jì)算了BBO-MLP、PSO、ACO、ES、GA和PBIL的分類(lèi)精度并相互比較。輸出每種算法的收斂曲線和分類(lèi)精度。程序已調(diào)通,可直接運(yùn)行。
2009
matlab應(yīng)用與學(xué)習(xí) ??? 2年前
電化學(xué)儲(chǔ)能電站模型實(shí)測(cè)及仿真分析 
在參數(shù)辨識(shí)領(lǐng)域,遺傳、粒子群、狼群等各類(lèi)智能算法應(yīng)用得較多,本質(zhì)都是反復(fù)迭代計(jì)算,通過(guò)有策略地調(diào)整參數(shù)以盡快獲得滿足迭代目標(biāo)的結(jié)果,本文選用粒子群算法進(jìn)行參數(shù)辨識(shí)。儲(chǔ)能控制系統(tǒng)參數(shù)辨識(shí)基本流程如下。
4415 3
我是小能 ??? 2年前
36基于matlab的對(duì)分解層數(shù)和懲罰因子進(jìn)行優(yōu)化。蟻獅優(yōu)化算法優(yōu)化VMD,算術(shù)優(yōu)化算法優(yōu)化VMD 
基于matlab的對(duì)分解層數(shù)和懲罰因子進(jìn)行優(yōu)化。蟻獅優(yōu)化算法優(yōu)化VMD,算術(shù)優(yōu)化算法優(yōu)化VMD,遺傳優(yōu)化算法優(yōu)化VMD,灰狼優(yōu)化算法優(yōu)化VMD,海洋捕食者優(yōu)化算法優(yōu)化VMD,粒子群優(yōu)化VMD,麻雀優(yōu)化算法優(yōu)化VMD,鯨魚(yú)優(yōu)化算法優(yōu)化VMD。程序已調(diào)通,可直接運(yùn)行。
2090
matlab應(yīng)用與學(xué)習(xí) ??? 2年前
基于matlab求解二維非穩(wěn)態(tài)對(duì)流擴(kuò)散反應(yīng)問(wèn)題 
);p=dof_constrained;f_aus=1:N;p_aus=zeros(1,N);p_aus(p)=p;f=f_aus-p_aus;f=find(f);A_ff=A(f,f);A_fp=A(f,p);A_pf=A(p,f);A_pp=A(p,p);end?? 運(yùn)行結(jié)果? 參考文獻(xiàn)[1]陳亞文,鄒學(xué)文.二維非穩(wěn)態(tài)對(duì)流擴(kuò)散方程反問(wèn)題的混沌粒子群算法
2286 1 1
Matlab心得交流 ??? 2年前
Ansys Lumerical | 用于增強(qiáng)現(xiàn)實(shí)系統(tǒng)的表面浮雕光柵 
對(duì)光柵進(jìn)行優(yōu)化,以將波長(zhǎng)為 550 nm 的光傳輸?shù)?-1 光柵階次。RCWA 求解器用于SRG的優(yōu)化和完整的特性描述,具體包含定義仿真參數(shù)和運(yùn)行仿真這兩個(gè)步驟。第 1 步:耦合光柵的優(yōu)化使用內(nèi)置的粒子群優(yōu)化(PSO)實(shí)用程序,優(yōu)化SRG的傾斜角、填充因子和光柵高度,以最大限度地提高在法向入射時(shí) 550 nm波長(zhǎng)下S偏振的透射率。
2378 2
宇熠科技 ??? 2年前
1-36基于matlab的對(duì)分解層數(shù)和懲罰因子進(jìn)行優(yōu)化 
基于matlab的對(duì)分解層數(shù)和懲罰因子進(jìn)行優(yōu)化。蟻獅優(yōu)化算法優(yōu)化VMD,算術(shù)優(yōu)化算法優(yōu)化VMD,遺傳優(yōu)化算法優(yōu)化VMD,灰狼優(yōu)化算法優(yōu)化VMD,海洋捕食者優(yōu)化算法優(yōu)化VMD,粒子群優(yōu)化VMD,麻雀優(yōu)化算法優(yōu)化VMD,鯨魚(yú)優(yōu)化算法優(yōu)化VMD。程序已調(diào)通,可直接運(yùn)行。單個(gè)30,打包150。購(gòu)買(mǎi)后可下載視頻中的源程序文件。
213
matlab應(yīng)用與學(xué)習(xí) ??? 1年前
汽車(chē)油箱沖壓工藝優(yōu)化 
第二步, 采用PSO優(yōu)化工藝窗口 在以上DOE結(jié)果的基礎(chǔ)上,根據(jù)確定的主次影響因素,縮小輸入變量的取值范圍,采用PSO粒子群算法或GA遺傳算法進(jìn)一步優(yōu)化,確定最佳的工藝窗口。
2013
C3PChina ??? 4年前
如何分析夾雜在金屬液中的微小氣泡 
這一技術(shù)的核心就是把氣體的體積轉(zhuǎn)換成質(zhì)量并賦在每個(gè)節(jié)點(diǎn)上,我們稱為質(zhì)量粒子。這些質(zhì)量粒子可以合并、分裂和移動(dòng),也可以通過(guò)排氣系統(tǒng)排出整個(gè)系統(tǒng)。如果定義得當(dāng),該質(zhì)量粒子能夠準(zhǔn)確地模擬氣泡的特征。更具體地,當(dāng)氣泡變得小于元件尺寸并且體積消失時(shí),質(zhì)量粒子并不會(huì)消失,它們可以存儲(chǔ)在消失區(qū)域的相應(yīng)節(jié)點(diǎn)上,并伴隨金屬液體的移動(dòng)而移動(dòng)。但由于其阻力和浮力,它也可以偏離金屬流動(dòng)的路徑。
2408 3 1
C3PChina ??? 3年前
20條/頁(yè) 
跳至頁(yè)

技術(shù)鄰APP
工程師必備
工程師必備
- 項(xiàng)目客服
- 培訓(xùn)客服
- 平臺(tái)客服
TOP
