



279 基于matlab的粒子群集法對(duì)鐵路電能質(zhì)量控制系統(tǒng)的容量避行優(yōu)化設(shè)計(jì) 
基于matlab的粒子群集法對(duì)鐵路電能質(zhì)量控制系統(tǒng)的容量避行優(yōu)化設(shè)計(jì)。計(jì)算出滿足功率因素、電壓不平衡度等電能指標(biāo)的條件下。RPC所需要的補(bǔ)償功率。求得所需最小的系統(tǒng)客量。該設(shè)計(jì)能快速計(jì)算出符合系統(tǒng)設(shè)定指標(biāo)的各項(xiàng)最優(yōu)補(bǔ)償功率。并通過(guò)sumulink份真。檢驗(yàn)設(shè)計(jì)參數(shù)的準(zhǔn)確性。程序已調(diào)通,可直接運(yùn)行。
2203
matlab應(yīng)用與學(xué)習(xí) ??? 1年前
1-106基于matlab的粒子群算法與 Simulink 模型之間連接的橋梁是粒子(即PID控制器參數(shù))和該粒子對(duì)應(yīng)的適應(yīng)值(即控制系統(tǒng)的性能指標(biāo)) 

基于matlab的粒子群算法與 Simulink 模型之間連接的橋梁是粒子(即 PID 控制器參數(shù))和該粒子對(duì)應(yīng)的適應(yīng)值(即控制系統(tǒng)的性能指標(biāo))。
401
matlab應(yīng)用與學(xué)習(xí) ??? 1年前
1-18基于matlab的二階動(dòng)態(tài)系統(tǒng)的滑膜控制 
基于matlab的二階動(dòng)態(tài)系統(tǒng)的滑膜控制,程序已調(diào)通,可直接運(yùn)行。購(gòu)買(mǎi)后可下載視頻中的源程序文件。
228
matlab應(yīng)用與學(xué)習(xí) ??? 1年前
18基于matlab的二階動(dòng)態(tài)系統(tǒng)的滑膜控制,程序已調(diào)通,可直接運(yùn)行。 
基于matlab的二階動(dòng)態(tài)系統(tǒng)的滑膜控制,程序已調(diào)通,可直接運(yùn)行。標(biāo)價(jià)為程序價(jià)格,不包含售后。程序保證可直接運(yùn)行。
1657
matlab應(yīng)用與學(xué)習(xí) ??? 2年前
18基于matlab的二階動(dòng)態(tài)系統(tǒng)的滑膜控制,程序已調(diào)通,可直接運(yùn)行。標(biāo)價(jià)為程序價(jià)格,不包含售后。 
基于matlab的二階動(dòng)態(tài)系統(tǒng)的滑膜控制,程序已調(diào)通,可直接運(yùn)行。標(biāo)價(jià)為程序價(jià)格,不包含售后。程序保證可直接運(yùn)行。
1860
explicit ??? 2年前
Ansys機(jī)電系統(tǒng)行業(yè)方案概述 
機(jī)電一體化是在傳統(tǒng)技術(shù)的基礎(chǔ)上由多種技術(shù)學(xué)科相互交叉、滲透而形成的一門(mén)綜合性學(xué)科,所涉及的技術(shù)領(lǐng)域非常廣泛:機(jī)械技術(shù)、檢測(cè)傳感、信息處理、自動(dòng)控制、伺服驅(qū)動(dòng)、電子技術(shù)等。 電驅(qū)動(dòng)系統(tǒng)核心組成 機(jī)電一體化系統(tǒng)與控制設(shè)計(jì) 機(jī)電產(chǎn)品復(fù)雜性大,涉及多物理域、軟硬件集成。
2356
Cruise ??? 3年前
基于PLC的閥門(mén)生產(chǎn)線控制系統(tǒng)設(shè)計(jì)與仿真分析 
基于PLC控制的閥門(mén)生產(chǎn)流程如圖1所示。圖1 程序流程圖 4 閥門(mén)生產(chǎn)線控制系統(tǒng)的仿真分析4.1 構(gòu)建控制系統(tǒng)數(shù)學(xué)模型文章使用Matlab 8.0軟件進(jìn)行閥門(mén)生產(chǎn)線控制系統(tǒng)的仿真分析,并利用該軟件內(nèi)置的Simulink工具箱進(jìn)行編程。
4351 4 1
機(jī)械工程師 ??? 2年前
飛行器系統(tǒng)仿真與驗(yàn)證 
2.4 電動(dòng)舵機(jī)系統(tǒng)仿真舵機(jī)閉環(huán)系統(tǒng)中的機(jī)電伺服系統(tǒng)模型可以通過(guò)Simcenter Amesim電子基礎(chǔ)庫(kù)、電力電子庫(kù)、電機(jī)驅(qū)動(dòng)庫(kù)以及電池庫(kù)完成建模。電動(dòng)舵機(jī)(EMA),其構(gòu)成包括傳感器、控制器、直流有刷及無(wú)刷電機(jī)、減速齒輪系統(tǒng)和機(jī)械傳動(dòng)裝置。由電動(dòng)舵機(jī)系統(tǒng)的主要構(gòu)成可見(jiàn),完整的舵機(jī)系統(tǒng)是多學(xué)科機(jī)電閉環(huán)耦合系統(tǒng),涉及電、磁、傳動(dòng)、機(jī)械、熱等,同時(shí)包含復(fù)雜的控制算法。
3811 2 1
航發(fā)設(shè)計(jì) ??? 3年前
MATLAB/Simulink建模-車(chē)輛巡航控制 (1) 
因此,我們需要設(shè)計(jì)一個(gè)反饋控制器,它可以顯著加快響應(yīng)速度,而不會(huì)對(duì)其他動(dòng)態(tài)性能指標(biāo)產(chǎn)生負(fù)面影響。開(kāi)環(huán)極點(diǎn)/零點(diǎn)巡航控制系統(tǒng)在 s = -b/m 處有一個(gè)單極點(diǎn),我們可以看到使用以下 MATLAB 命令繪制在 s 平面上:pzmap(P_cruise)axis([-1 1 -1 1])我們觀察到開(kāi)環(huán)系統(tǒng)是穩(wěn)定的并且不會(huì)振蕩,因?yàn)闃O點(diǎn)是實(shí)數(shù)和負(fù)數(shù)。
2700 11 4
AutoEuler ??? 4年前
基于AVL EXCITE M與Simulink控制耦合的電機(jī)諧波注入NVH分析 
圖3電機(jī)控制模型 圖4 EXCITE M考慮PWM頻率響應(yīng) 為納入外部電流控制策略的影響因素,EXCITE M 軟件支持 Matlab 模塊的集成應(yīng)用,用戶可基于真實(shí) Simulink 控制策略于EXCITE M完成電機(jī)的動(dòng)態(tài)響應(yīng)分析。
2500
AVL先進(jìn)模擬技術(shù) ??? 4月前
一種基于MATLAB Simulink建模的整車(chē)VBC離線標(biāo)定方法 
本文介紹的基于MATLAB Simulink建模的整車(chē)VBC離線標(biāo)定方法,在行業(yè)內(nèi)是突破性的標(biāo)定方法。可以應(yīng)用推廣到不同電控系統(tǒng)的車(chē)型,大幅度提高VBC標(biāo)定的精度和效率。參考文獻(xiàn)[1] 王正林,王勝開(kāi),陳國(guó)順. MATLAB/Simulink與控制系統(tǒng)仿真[M].北京:電子工業(yè)出版社,2005.[2] 黃永安,馬路,劉慧敏.
2772 4 2
Matlab心得交流 ??? 2年前
機(jī)電設(shè)備多學(xué)科及系統(tǒng)級(jí)聯(lián)合仿真 
機(jī)電設(shè)備多學(xué)科及系統(tǒng)級(jí)聯(lián)合仿真(免費(fèi))【已結(jié)束】 直播時(shí)間:2023-04-18 19:30主要內(nèi)容大綱:(一)Altair機(jī)電設(shè)備物理場(chǎng)仿真方案1.機(jī)電設(shè)備多體動(dòng)力學(xué)及結(jié)構(gòu)力學(xué)仿真2.電機(jī)多物理場(chǎng)耦合分析(二)Altair系統(tǒng)級(jí)建模仿真方案與應(yīng)用1.電機(jī)驅(qū)動(dòng)系統(tǒng)建模與仿真2.包含系統(tǒng)控制的機(jī)構(gòu)動(dòng)力學(xué)系統(tǒng)建模3.1D-3D機(jī)電系統(tǒng)聯(lián)合仿真應(yīng)用
1303
ALTAIR ??? 3年前
Simulink&車(chē)輛巡航控制 (2) -PID控制設(shè)計(jì) 
1.系統(tǒng)模型和參數(shù)下面給出了巡航控制問(wèn)題的傳遞函數(shù)模型。有關(guān)推導(dǎo),請(qǐng)參閱:MATLAB/Simulink建模-車(chē)輛巡航控制 (1)。
2809 1
AutoEuler ??? 4年前
在 COMSOL 中對(duì)自適應(yīng)光學(xué)系統(tǒng)進(jìn)行仿真 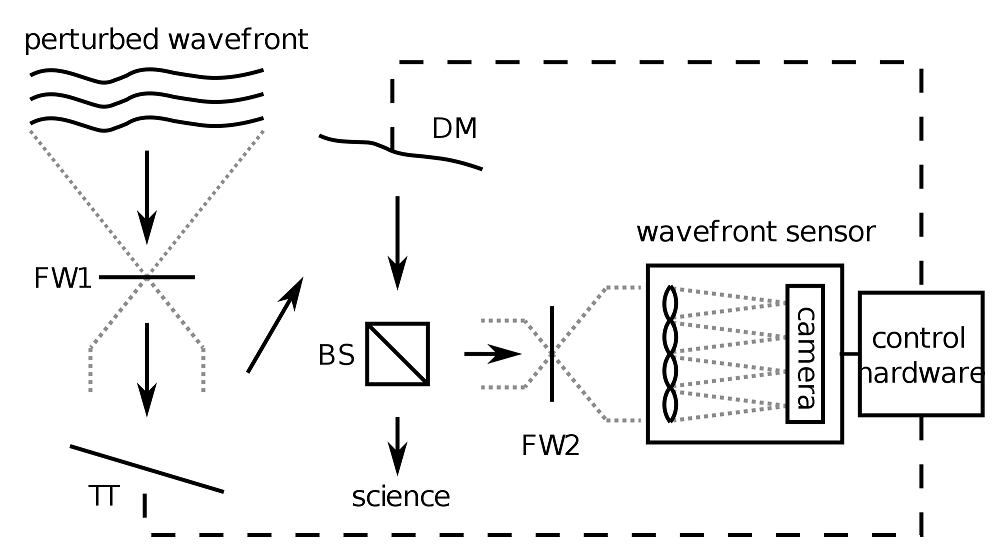
一個(gè)自適應(yīng)光學(xué)系統(tǒng)的示意圖。波前在頂部進(jìn)入系統(tǒng)。光線首先照射到端傾斜鏡(TT),然后被引導(dǎo)到可變形鏡(DM)。波前被校正,部分光線被分光鏡(BS)分出。波面由波面?zhèn)鞲衅鳎ū纠袨?Shack-Hartmann)測(cè)量,然后控制硬件向 DM 和 TT 鏡發(fā)送更新信號(hào)。兩個(gè)濾波輪(FW1 和 FW2)只在校準(zhǔn)時(shí)使用。來(lái)源:Wikimedia Commons。
3690 1
光與影 ??? 2年前
跟我一起來(lái)認(rèn)識(shí)RecurDyn 附RecurDyn柔性體技術(shù)介紹下載 
CAE接口主要包括與其他第三方軟件聯(lián)合仿真接口,可與控制軟件(如Matlab/Simulink)及液壓軟件(如AMEsim,HyPneu)集成,實(shí)現(xiàn)機(jī)電液一體化聯(lián)合仿真。在多學(xué)科集成模塊,包括MFBD,與控制系統(tǒng)集成,流固耦合仿真及優(yōu)化設(shè)計(jì)。應(yīng)用MFBD多柔性體動(dòng)力學(xué)分析技術(shù),得到構(gòu)件在運(yùn)動(dòng)過(guò)程中的變形,應(yīng)力和應(yīng)變,基于動(dòng)應(yīng)力,應(yīng)變結(jié)果對(duì)構(gòu)件的疲勞壽命進(jìn)行探究。
3505 1
huanggu4797 ??? 3年前
270 基于matlab的模糊自適應(yīng)PID控制 
基于matlab的模糊自適應(yīng)PID控制,具有10頁(yè)報(bào)告。傳統(tǒng)PID在對(duì)象變化時(shí),控制器的參數(shù)難以自動(dòng)調(diào)整。將模糊控制與PID控制結(jié)合,利用模糊推理方法實(shí)現(xiàn)對(duì)PID參數(shù)的在線自整定。使控制器具有較好的自適應(yīng)性。使用MATLAB對(duì)系統(tǒng)進(jìn)行仿真,結(jié)果表明系統(tǒng)的動(dòng)態(tài)性能得到了提高。程序已調(diào)通,可直接運(yùn)行。
2236
matlab應(yīng)用與學(xué)習(xí) ??? 1年前
基于AMESim的PEMFC冷卻系統(tǒng)建模與控制研究 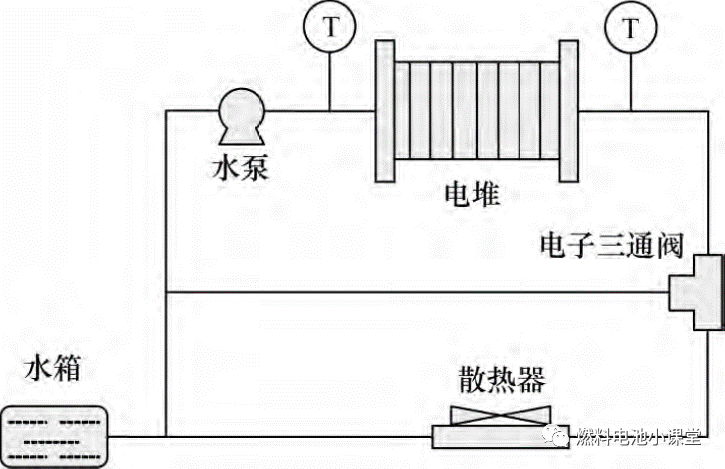
由此可見(jiàn),燃料電池的溫度控制非常必要。PEMFC的熱管理由冷卻系統(tǒng)完成,冷卻系統(tǒng)的建模仿真研究對(duì)實(shí)際的工業(yè)生產(chǎn)具有重要的意義。國(guó)內(nèi)外學(xué)者針對(duì)冷卻系統(tǒng)的建模和仿真已經(jīng)提出了很多的理論和工具。馬天才,Wang使用MATLAB/Simulink搭建了仿真模型,對(duì)燃料電池的溫度變化進(jìn)行了研究。羅馬吉等使用CT-COOL軟件建立了燃料電池冷卻系統(tǒng)的一維模型,達(dá)到了較高的仿真精度。
4005
技術(shù)哥 ??? 3年前
設(shè)計(jì)仿真 | Adams導(dǎo)入Matlab生成的FMU 
addpath('D:\msc_setup\matlab\fmi\FMIKit-Simulink-3.1')上述代碼完成FMIkit的加載,然后通過(guò)FMIKit.initialize()實(shí)現(xiàn)對(duì)其的初始化。至此,準(zhǔn)備工作完成。接著,打開(kāi)控制模型antenna.mdl,對(duì)其進(jìn)行子系統(tǒng)封裝,將輸入輸出端口留好。
2743
海克斯康設(shè)計(jì)與仿真 ??? 1年前
淺談基于模型的系統(tǒng)工程(MBSE)技術(shù) 
飛機(jī)機(jī)電系統(tǒng)包括燃油系統(tǒng)、液壓系統(tǒng)、環(huán)控系統(tǒng)、電氣系統(tǒng)、二動(dòng)力系統(tǒng)等,是典型的復(fù)雜系統(tǒng)。隨著系統(tǒng)復(fù)雜度與綜合化程度的提高,飛機(jī)機(jī)電系統(tǒng)的設(shè)計(jì)過(guò)程呈現(xiàn)出需求多樣化、功能交互高度復(fù)雜、各領(lǐng)域物理系統(tǒng)交聯(lián)耦合強(qiáng)、系統(tǒng)綜合化程度高等特點(diǎn),開(kāi)展飛機(jī)機(jī)電系統(tǒng)綜合設(shè)計(jì)已成為飛機(jī)設(shè)計(jì)亟需解決的問(wèn)題。
4054 9 2
一起學(xué)MBSE ??? 2年前
淺析無(wú)人機(jī)仿真技術(shù) 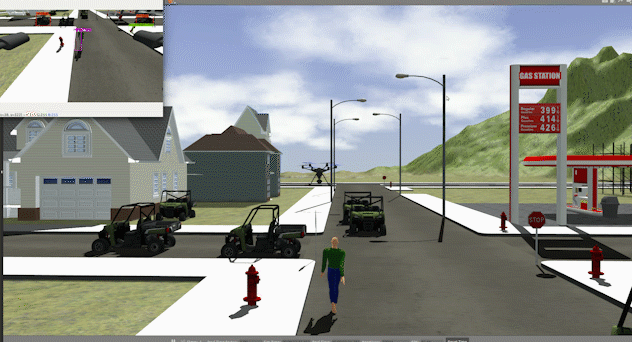
在系統(tǒng)模型與控制系統(tǒng)相似的前提下還要做到精確,數(shù)學(xué)模型的數(shù)據(jù)必須精確的反映控制系統(tǒng)中的定量關(guān)系才能使數(shù)學(xué)模型和控制系統(tǒng)的動(dòng)態(tài)過(guò)程相似。
4686
無(wú)人機(jī)圈 ??? 2年前
20條/頁(yè) 
 25
25 跳至頁(yè)

技術(shù)鄰APP
工程師必備
工程師必備
- 項(xiàng)目客服
- 培訓(xùn)客服
- 平臺(tái)客服
TOP
