



Matlab機(jī)械連桿機(jī)構(gòu)運動學(xué)仿真:包含三桿滑塊機(jī)構(gòu)\四桿\六桿 

詳細(xì)介紹了三桿滑塊機(jī)構(gòu)和四桿機(jī)構(gòu)運動方程的推導(dǎo)及matlab對上述機(jī)械連桿機(jī)構(gòu)運動仿真,并實現(xiàn)機(jī)械連桿機(jī)構(gòu)運動動畫的繪制,注:六桿機(jī)構(gòu)無公式推導(dǎo)文本,只有代碼。如需模型推導(dǎo)說明文本及matlab源碼,請附件下載。
16
SimPC ??? 3年前
210基于matlab的仿真機(jī)械四連桿機(jī)構(gòu)運動代碼 
基于matlab的仿真機(jī)械四連桿機(jī)構(gòu)運動代碼,包括運動仿真和變量變化分析圖的生成,包括角速度、速度、加速度等曲線。程序已調(diào)通,可直接運行。
2297
matlab應(yīng)用與學(xué)習(xí) ??? 2年前
ANSYS-WorkBench教程 曲柄連桿機(jī)構(gòu)剛?cè)狁詈稀⑽佪單仐U瞬態(tài)動力學(xué)有限元仿真 
本課程結(jié)合工程實際,使用workbench軟件對曲柄連桿機(jī)構(gòu)與蝸輪蝸桿的工作過程進(jìn)行仿真,課程包含:曲柄連桿機(jī)構(gòu)及曲柄滑塊(除運動副的設(shè)置外、還設(shè)置了摩擦副)。運用瞬態(tài)分析模塊,介紹了分析子步與計算收斂性的設(shè)置。詳細(xì)展示瞬態(tài)分析的建模流程與參數(shù)設(shè)置的過程,并配有詳盡的仿真案例。
452 3
伍欣然 ??? 5年前
Adams&Workbench&Matlab四連桿機(jī)構(gòu)運動學(xué)分析 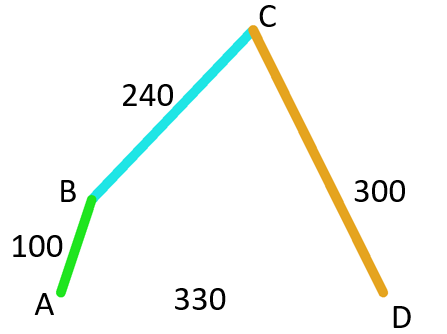
圖1為四連桿機(jī)構(gòu)的基本尺寸長度,其中曲柄長度為100mm,連桿的長度為240mm,搖桿的長度為300mm。
2811
擺渡人張 ??? 2年前
Abaqus中發(fā)動機(jī)曲柄連桿機(jī)構(gòu)動力學(xué)模擬 
講解了發(fā)動機(jī)曲柄連桿機(jī)構(gòu)(缸體+活塞+連桿+曲軸)動力學(xué)模擬的建模流程及方法,曲軸轉(zhuǎn)動720度,各活塞往復(fù)運動兩次。
395 3
楊紅波 ??? 2年前
仿真實踐 | 汽車發(fā)動機(jī)連桿模鍛&熱處理鏈?zhǔn)?em>仿真 
連桿作為發(fā)動機(jī)曲柄連桿機(jī)構(gòu)中的關(guān)鍵受力件,對強(qiáng)度、硬度、組織一致性以及尺寸穩(wěn)定性要求極高,一旦模鍛流線、殘余應(yīng)力或淬火冷卻控制不當(dāng),極易在后續(xù)機(jī)加工和裝配過程中暴露出質(zhì)量波動問題,影響裝機(jī)一致性與批量交付穩(wěn)定性。
1411 1
Supreium適創(chuàng)科技 ??? 20天前
DTAS 3D多約束裝配助力懸架公差分析&尺寸鏈計算:麥弗遜/雙叉臂/多連桿/H臂一網(wǎng)打盡 
機(jī)構(gòu)的各類為柔性襯套,如何將機(jī)構(gòu)運動、公差仿真、柔性仿真三者耦合是當(dāng)前與未來懸架公差分析的一大挑戰(zhàn)。
2554
DTAS棣拓尺寸公差分析及尺寸鏈計算 ??? 12月前
基于ADAMS的助老起升裝置的運動學(xué)仿真分析 
關(guān)鍵詞: 虛擬樣機(jī); ADAMS; 四連桿機(jī)構(gòu); 運動學(xué)仿真0 引 言 伴隨著社會的不斷進(jìn)步和發(fā)展,人口老齡化的問 題也在不斷加劇,并逐漸成為當(dāng)今社會的主要問題之 一。
2604 5
擺渡人張 ??? 2年前
ANSYS workbench 四連桿運動學(xué)分析 
本案例適合哪些人學(xué)習(xí):1、學(xué)習(xí)型仿真工程師2、理工科院校學(xué)生3、對有限元分析感興趣的工程師你會得到什么:1、學(xué)習(xí)四連桿機(jī)構(gòu)的三維模型處理2、學(xué)習(xí)四連桿機(jī)構(gòu)接觸相關(guān)的接觸設(shè)置3、學(xué)習(xí)多體動力學(xué)分析步的建立4、學(xué)習(xí)四連桿機(jī)構(gòu)多體動力學(xué)分析的載荷施加案例介紹:所使用軟件為ANSYS workbench2020r2.
2312
天空紀(jì)年xh ??? 1年前
基于Adams的六足直立式步行機(jī)器人運動仿真分析 
仿真結(jié)果與理論運動學(xué)分析結(jié)果一致,lHJ 擺動角范圍可達(dá)45.5°,可通過改變lHJ延伸桿lJK的長度和曲柄lOF桿長度來調(diào)節(jié)機(jī)體步幅大小。4 原型樣機(jī)搭建及行走試驗圖9 所示為雙電機(jī)驅(qū)動的六足直立式步行機(jī)器人。根據(jù)單側(cè)步行腿連桿機(jī)構(gòu)運動仿真模型,構(gòu)建另一側(cè)步行腿機(jī)構(gòu)模型進(jìn)行運動學(xué)仿真,結(jié)果表明,兩側(cè)步行腿連桿機(jī)構(gòu)的運動軌跡和測量曲線變化一致,仿真結(jié)果與理論運動學(xué)分析結(jié)果一致。
4190 7 8
仿真客 ??? 3年前
269 基于matlab的四連桿機(jī)構(gòu)動力學(xué)參數(shù)計算 
基于matlab的四連桿機(jī)構(gòu)動力學(xué)參數(shù)計算。將抽油機(jī)簡化為4連桿機(jī)構(gòu),仿真出懸點的位移、速度、加速度、扭矩因數(shù)、游梁轉(zhuǎn)角等參數(shù),并繪出圖形。程序已調(diào)通,可直接運行。
2210 1
matlab應(yīng)用與學(xué)習(xí) ??? 1年前
大客車空調(diào)壓縮機(jī)懸置機(jī)構(gòu)優(yōu)化仿真 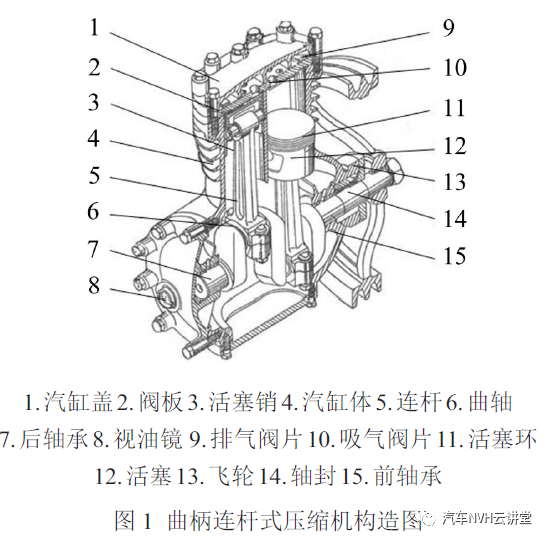
關(guān)鍵詞 :振動與波;空調(diào)壓縮機(jī);懸置機(jī)構(gòu);動力學(xué)仿真;大客車;解耦率 壓縮機(jī)是大客車空調(diào)系統(tǒng)核心部件,其中曲軸連桿式壓縮機(jī)由于制造技術(shù)成熟、結(jié)構(gòu)簡單、對加工材料和加工工藝要求低、制冷量大等特點多應(yīng)用在大型客車上[1],如圖1所示。但其在工作過程中會有較大的振動,所以必須安裝有相應(yīng)的懸置機(jī)構(gòu)。
2855 5 1
我愛汽輪機(jī)仿真 ??? 2年前
abaqus的HINGE連接在仿真時不起作用?
一套連桿機(jī)構(gòu),設(shè)置了多個鉸鏈連接。用動力顯式 DYNAMIC EXPLICIT 分析,仿真連桿受到其他物體沖擊后的動作。結(jié)果跑完發(fā)現(xiàn)有些鉸鏈直接沒起作用,跑歪了。。
2318 4
易_9938 ??? 1年前
三自由度機(jī)械臂運動學(xué)分析+仿真 
求關(guān)節(jié)角 對式子兩邊連續(xù)乘以A1-A2的逆矩陣,可得 讓上述公式中第一行第三列對應(yīng)相等,第二行第三列對應(yīng)相等可得: 3機(jī)器人模型建立 所設(shè)計的機(jī)器人由多個連桿機(jī)構(gòu)組成,其關(guān)節(jié)類型包括旋轉(zhuǎn)關(guān)節(jié)和移動關(guān)節(jié)兩種。利用Matlab中機(jī)器人仿真工具箱Robotics Tool中Link和SerialLink兩個函數(shù)可建立機(jī)器人模型[] 。
3997
余俊煒 ??? 2年前
基于abaqus cae的曲柄連桿模擬(附帶模型文件) 
本實例是基于abaqus cae的曲柄連桿模擬,給定曲柄機(jī)構(gòu)中的小盤轉(zhuǎn)速,各零部件定義連接單元,最終實現(xiàn)整體的運動仿真。實例視頻下方附帶UG模型和cae模型
101 3
王振東 ??? 5年前
ANSYS Workbench曲柄連桿齒輪機(jī)構(gòu)剛體動力學(xué)分析 
該項目是關(guān)于使用 ANSYS Workbench(機(jī)械)對連桿曲柄滑動機(jī)構(gòu)進(jìn)行 RBD 分析。 ANSYS Mechanical 仿真文件供下載文件file.wbpz
2201
仿真資料吧 ??? 1年前
案例分享︱復(fù)雜仿真應(yīng)用定制——ccxShapeOpt結(jié)構(gòu)形狀優(yōu)化APP 
從下圖可以看出,形狀優(yōu)化后的連桿最大mises應(yīng)力降低了14%。從應(yīng)力云圖可以看出,初始結(jié)構(gòu)應(yīng)力分布不均勻,連桿上部分應(yīng)力較大,下部分應(yīng)力較小。在體積不變的情況下,通過自由形狀優(yōu)化,減小了小應(yīng)力部分的直徑,增大了大應(yīng)力部分的直徑(見圖5局部放大圖),使得最大應(yīng)力減小,應(yīng)力分布更加均勻。
2518
神工坊(高性能仿真) ??? 6月前
通過仿真分析汽車的換擋原理 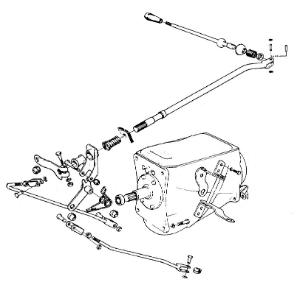
使用 COMSOL 軟件模擬換擋機(jī)構(gòu) 為了回答這些問題,我們選擇使用 COMSOL 多體動力學(xué)和結(jié)構(gòu)力學(xué)模塊進(jìn)行仿真,其中多體動力學(xué)模塊提供了預(yù)定義的功能,可用于定義各部件之間不同類型的關(guān)節(jié)。 多體動力學(xué)模塊 擴(kuò)展了 COMSOL Multiphysics 和 結(jié)構(gòu)力學(xué)模塊 的功能,使我們能夠?qū)C(jī)械裝配體進(jìn)行建模。
2457 6 1
仿真客 ??? 2年前
車企用Abaqus、CATIA和Isight加速汽車設(shè)計 
為進(jìn)行設(shè)計仿真測試,福特工程師采用AFC創(chuàng)建轉(zhuǎn)向節(jié) 和襯內(nèi)套的有限元模型,并通過CATIA創(chuàng)建的模型獲 得幾何輸入和材料屬性。AFC保持與CATIA模型的相 關(guān)性,確保當(dāng)CAD模型在設(shè)計變量變化范圍內(nèi)變更時 Abaqus模型更新的魯棒性。在物理組裝流程中,鍛鋼內(nèi)錐受力緊靠鋁轉(zhuǎn)向座。由于 不同部件的生產(chǎn)工藝不同,錐設(shè)計特性的角度公差不同 于內(nèi)套和轉(zhuǎn)向接合表面。
2518 3 1
迅利科技 ??? 2年前
Adams 多體動力學(xué):工業(yè)仿真的黃金標(biāo)準(zhǔn)與未來引擎
· 無縫集成 **CAD(SolidWorks、CATIA)、FEA(ANSYS、Abaqus)、控制(MATLAB)、疲勞(MSC Fatigue)** 工具,實現(xiàn) “幾何建模 - 動力學(xué)仿真 - 結(jié)構(gòu)分析 - 控制優(yōu)化 - 壽命預(yù)測” 全流程閉環(huán),支撐數(shù)字孿生落地。3.
900
庭田科技 ??? 5天前
20條/頁 
跳至頁

技術(shù)鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓(xùn)客服
- 平臺客服
TOP
