



蛇形坦克機器人設計蛇形坦克機器人設計 
蛇形坦克機器人設計 本項目展示了一種模塊化救援機器人的機械設計,該機器人專為地震后搜救任務而開發。該機器人將蛇形柔性車身與履帶式(類似坦克)移動系統相結合,能夠在狹窄、充滿碎石的空間中穿行。它能夠越過高達 30 厘米的障礙物,并傳輸實時熱成像和視頻數據以支持救援隊。
1158
仿真資料吧 ??? 11月前
設計仿真 | AI+仿真雙驅動!海克斯康領跑人形機器人研發 
此外,基于仿真數據和AI大模型的分析,為用戶提供決策建議,如在人形機器人設計中,根據不同的任務需求,推薦最優的關節參數、結構布局等。通過以上多方面的應用,海克斯康工業仿真軟件能夠為人形機器人的研發提供全面的技術支持,幫助研發人員解決從機械設計到控制系統開發,從結構強度到驅動系統設計等一系列復雜問題,加速人形機器人的研發進程,提升產品的競爭力。
3242 1 1
海克斯康設計與仿真 ??? 1年前
人形機器人關節電機設計“寶典” 
宇樹A1機器人關節電機簡介(本圖來源于宇樹官網) 宇樹A1機器人關節電機是一款高性能電機,專為智能機器人設計,主要用于關節和機械臂。它配備高精度編碼器,支持精確角度控制和流暢運動,具備高扭矩輸出,適應復雜操作。
9970
杭州麥科斯韋 ??? 1年前
RecurDyn成功案例:基于仿真設計的多關節機器人 
▎解決方案 ?借助逆向動力學預測并確認機器人的運動范圍?通過RecurDyn模型獲得設計所需的數據,如扭矩和剛度?利用RecurDynMFBD技術準確預測機器人的振動特性?基于RecurDyn模型代替物理樣機設計控制器 ▎結論 ?利用虛擬模型快速設計控制器,無需借助物理樣機即可控制機器人的行為
2608 1 1
杭州擬創(RecurDyn原廠) ??? 3年前
RecurDyn成功案例:基于仿真設計的多關節機器人 
▎解決方案 ?借助逆向動力學預測并確認機器人的運動范圍?通過RecurDyn模型獲得設計所需的數據,如扭矩和剛度?利用RecurDynMFBD技術準確預測機器人的振動特性?基于RecurDyn模型代替物理樣機設計控制器 ▎結論 ?利用虛擬模型快速設計控制器,無需借助物理樣機即可控制機器人的行為
2529
杭州擬創(RecurDyn原廠) ??? 2年前
清潔機器人底殼注射模具設計+3d 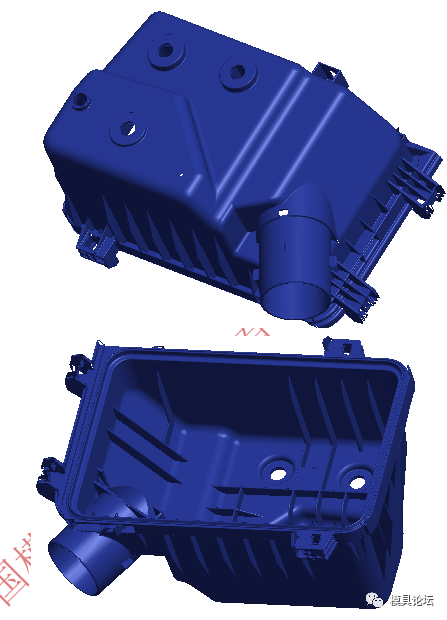
圖1清潔機器人底殼產品圖從圖1可以看出, 塑件為近似為矩形的封閉殼體,殼體邊緣有3處小的功能性結構需要設計滑塊抽芯,塑件一個角部有一處斜向的圓筒,需要設計滑塊抽芯,斜向圓筒的外形同樣需要設計滑塊抽芯。塑件頂面有局部凸起,有4處凸臺并有圓孔。塑件邊緣和內部有多條加強筋。塑件尺寸較大,模具結構復雜,外形有多處滑塊抽芯,模具設計型腔排位為1出1.模具設計排位圖見圖2所示。
2321
模具論壇 ??? 3年前
從"流浪地球"到ChatGPT,頂流機器人設計需要哪些仿真技術? 
為了讓機器人的工作表現達到預期目標,在設計階段就需要建立機器人的多體動力學數字樣機,來評估機器人的動力學、運動學特性。對于機器人整體,可以評估不同的控制策略;對于關鍵的承力部件,可以結合有限元仿真軟件完成剛-柔耦合分析。甚至還可以做一些拓撲優化,讓機器手臂的樣子更具未來感。 3、多體動力學仿真在機器人設計中起什么作用?
2113
安世亞太 ??? 3年前
工業機器人本體結構設計 

工業機器人常用結構及對比4. 工業機器人設計難點
3767 1 1
錦衣夜行 ??? 4年前
2024年RecurDyn優秀案例競賽作品分享:核探測機器人底盤設計與越障性能仿真驗證 
該機器人搭載多種探測傳感器并對關鍵驅控部分進行了輻射屏蔽,可在強輻射環境下完成探查、巡檢作業;該機器人的履帶移動底盤設計采用驅動輪與地面具有一定角度的離地角同時使誘導輪接地的方法以保證機器人具有較好的越障性能和地形適應能力;底盤設計了減震結構以減少機器人震動對探測器造成的影響。
2556
杭州擬創(RecurDyn原廠) ??? 1年前
RecurDyn經典案例:象鼻機器人機械臂的優化設計 
象鼻機器人是一種模仿象鼻行為的具有無限自由度的機械手臂,目前正在研發中。這種機械臂機器人是由一組圓盤,通過中心連接到一個柔性軸上,由一組穿過圓盤的電纜控制。電纜的末端直接連接到電機上。手臂具有連續運動,可針對特定的應用場景進行定制,例如,探查危險區域。為了優化這種柔性機械臂的設計,需要研究幾個參數:纜繩張力、纜繩末端隨時間變化的力、驅動機構所需的力、機器人的工作體積。
3366
杭州擬創(RecurDyn原廠) ??? 4年前
網絡課 | ANSYS焊接機器人仿真相關案例分享 
本文重點就焊接機器人定位精度和焊接工藝參這兩方面的內容進行展開,詳細介紹ANSYS的相關仿真應用案例以及具體的仿真流程方法。
1954
陽普科技 ??? 4年前
Ansys機器人仿真解決方案 
機器?系統和組件 · 3個機器??系統: ‐ ?體的組裝——通過關節/接觸連接 ‐ 電?電?/執?器——驅動機構和 ‐ 控制器——確保可預測和期望的運動 · 各種系統→不同的物理→不同的?具 機器?基礎設計與分析
4470
Cruise ??? 2年前
機器人關節如何做到精準控制的,原來內部結構這么復雜! 
現在工業機器人的自動化程度讓人嘆為觀止,5軸6軸機器人具有如此多的關節,還能夠做到運動和指令的精確傳輸,各部位緊密配合完成復雜的工作,讓人不禁好奇它們的傳動系統到底是怎樣的,關節到底是什么結構的呢? ▲日本安川機器人揮刀削豌豆 關節是工業機器人最重要的基礎部件之一,也是運動的核心部件:精密減速機。
3317
機械學霸 ??? 4年前
【5/17更新】機器人關節如何做到精準控制的,原來內部結構這么復雜! 
現在工業機器人的自動化程度讓人嘆為觀止,5軸6軸機器人具有如此多的關節,還能夠做到運動和指令的精確傳輸,各部位緊密配合完成復雜的工作,讓人不禁好奇它們的傳動系統到底是怎樣的,關節到底是什么結構的呢? ▲日本安川機器人揮刀削豌豆 關節是工業機器人最重要的基礎部件之一,也是運動的核心部件:精密減速機。
2091
技術鄰CAD學習 ??? 4年前
基于Hypermesh和OptiStruct/Nastran/Ansys行走機器人剛柔耦合分析 
行走機器人剛柔耦合分析Hypermesh和OptiStruct行走機器人右小腿柔性體的生成;Hypermesh和Nastran行走機器人右小腿柔性體的生成;Hypermesh和Ansys行走機器人左大腿柔性體的生成;行走機器人剛柔耦合后處理;購買后,私信發模型且都可加私信答疑。
49 4
Crisby_Vectory_TrHo ??? 6年前
【機器人仿真案例】基于RecurDyn Durability預測機器人夾爪疲勞壽命 
案例概要產品:機器人夾爪分析目標:預測夾爪機構薄弱部位的疲勞壽命半導體制造工藝需要處理大批量作業任務,這推動了專用機器人及各類自動化技術的發展,其中包括自主移動機器人(AMR)。半導體專用機器人夾爪的一個核心特性是:以極小接觸面積抓取物件,從而滿足潔凈室的潔凈度要求。因此,夾爪在結構上受到諸多限制,同時相較于其機械結構尺寸,還需承載相對較重的物件。
1430
杭州擬創(RecurDyn原廠) ??? 1月前
小米發布仿生四足機器人“鐵蛋”!解讀背后的建模和仿真技術 
現在全球各大公司都在加大投入研究機器人,通過高性能計算HPC模擬機器人結構是目前常用的方式。通過此方法,可以方便地進行參數優化和性能預測,提早發現設計問題,大大提高設計效率,節省時間和經費。今天為大家介紹一下基于Adams&Matlab的聯合仿真技術。參考文獻:吳潯煒,左鵬.四足機器人trot步態聯合仿真分析[J].農業裝備與車輛工程,2021,59(2):135-139.
2920
深圳北鯤云計算有限公司 ??? 3年前
水下機器人殼體(壓力容器)結構仿真演示、《仿真報告》編撰以及優化建議、優化方向引導 
以某個水下機器人殼體為例,對壓力容器內外壓力差形成的結構變形、應力分布進行結構仿真計算。視頻包括多個場景環境變化引起的邊界條件分析境、位移約束和邊界條件分配講解,同步演示操作過程,語音講解。
1420
王鑫敏 ??? 2年前
《基于 ABAQUS 的桁架機器人模態分析》 
摘 要:為了確保桁架機器人在設計階段滿足模態性能要求,在設計前期需要對桁架機器人進行模態分析研究。本文首先根據物流工廠中的實際需求,確定桁架機器人的整體結構,并建立三維模型;然后基于 ABAQUS 有限元仿真平臺提取桁架機器人的前十階固有頻率以及振型;最后通過模態試驗方法對桁架機器人的實體縮小模型進行分析。
3091 2
CAEer吳皓 ??? 2年前
Kiva機器人大拆解,領取Kiva機器人數模 
注意下圖中底盤上加工出來的散熱結構,其背面裝著的正是電機驅動器的巨型MOSFET。這種結構可以自然地利用底盤來以獲得最大的散熱效率。 連接懸掛結構的U型夾銷,底盤上的散熱片。電子元件 要讓Kiva機器人身上這三個大功率電機和一身的傳感器長時間可靠地工作,電子設備的設計是相當重要的一環。
3096
工廠物流自動化 ??? 4年前
20條/頁 
 184
184 跳至頁

技術鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP
